Novel Solar Sail Mission Concepts for Space Weather Forecasting
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lunar Flashlight & NEA Scout
National Aeronautics and Space Administration Lunar Flashlight & NEA Scout A NanoSat Architecture for Deep Space Exploration Payam Banazadeh (JPL/Caltech) Andreas Frick (JPL/Caltech) EM-1 Secondary Payload Selection • 19 NASA center-led concepts were evaluated and 3 were down-selected for further refinement by AES toward a Mission Concept Review (MCR) planned for August 2014 • Primary selection criteria: - Relevance to Space Exploration Strategic Knowledge Gaps (SKGs) - Life cycle cost - Synergistic use of previously demonstrated technologies - Optimal use of available civil servant workforce Payload Strategic Knowledge Gaps Mission Concept NASA Centers Addressed BioSentinel Human health/performance in high- Study radiation-induced DNA ARC/JSC radiation space environments damage of live organisms in cis- • Fundamental effects on biological systems lunar space; correlate with of ionizing radiation in space environments measurements on ISS and Earth Lunar Flashlight Lunar resource potential Locate ice deposits in the Moon’s JPL/MSFC/MHS • Quantity and distribution of water and other permanently shadowed craters volatiles in lunar cold traps Near Earth Asteroid (NEA) NEA Characterization Slow flyby/rendezvous and Scout • NEA size, rotation state (rate/pole position) characterize one NEA in a way MSFC/JPL How to work on and interact with NEA that is relevant to human surface exploration • NEA surface mechanical properties 2 EM-1: Near Earth Asteroid (NEA) Scout concept WHY NEA Scout? – Characterize a NEA with an imager to address key Strategic -
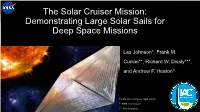
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions Les Johnson*, Frank M. Curran**, Richard W. Dissly***, and Andrew F. Heaton* * NASA Marshall Space Flight Center ** MZBlue Aerospace NASA Image *** Ball Aerospace Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. NASA Image 2 Solar Sail Missions Flown (as of October 2019) NanoSail-D (2010) IKAROS (2010) LightSail-1 (2015) CanX-7 (2016) InflateSail (2017) NASA JAXA The Planetary Society Canada EU/Univ. of Surrey Earth Orbit Interplanetary Earth Orbit Earth Orbit Earth Orbit Deployment Only Full Flight Deployment Only Deployment Only Deployment Only 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 3U CubeSat 10 m2 196 m2 32 m2 <10 m2 10 m2 3 Current and Planned Solar Sail Missions CU Aerospace (2018) LightSail-2 (2019) Near Earth Asteroid Solar Cruiser (2024) Univ. Illinois / NASA The Planetary Society Scout (2020) NASA NASA Earth Orbit Earth Orbit Interplanetary L-1 Full Flight Full Flight Full Flight Full Flight In Orbit; Not yet In Orbit; Successful deployed 6U CubeSat 90 Kg Spacecraft 3U CubeSat 86 m2 >1200 m2 3U CubeSat 32 m2 20 m2 4 Near Earth Asteroid Scout The Near Earth Asteroid Scout Will • Image/characterize a NEA during a slow flyby • Demonstrate a low cost asteroid reconnaissance capability Key Spacecraft & Mission Parameters • 6U cubesat (20cm X 10cm X 30 cm) • ~86 m2 solar sail propulsion system • Manifested for launch on the Space Launch System (Artemis 1 / 2020) • 1 AU maximum distance from Earth Leverages: combined experiences of MSFC and JPL Close Proximity Imaging Local scale morphology, with support from GSFC, JSC, & LaRC terrain properties, landing site survey Target Reconnaissance with medium field imaging Shape, spin, and local environment NEA Scout Full Scale EDU Sail Deployment 6 Solar Cruiser Mission Concept Mission Profile Solar Cruiser may launch as a secondary payload on the NASA IMAP mission in October, 2024. -

Performance Quantification of Heliogyro Solar Sails Using Structural
PERFORMANCE QUANTIFICATION OF HELIOGYRO SOLAR SAILS USING STRUCTURAL, ATTITUDE, AND ORBITAL DYNAMICS AND CONTROL ANALYSIS by DANIEL VERNON GUERRANT B.S., California Polytechnic State University at San Luis Obispo, 2005 M.S., California Polytechnic State University at San Luis Obispo, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirement for the degree of Doctor of Philosophy Department of Aerospace Engineering Sciences 2015 This thesis entitled: Performance Quantification of Heliogyro Solar Sails Using Structural, Attitude, and Orbital Dynamics and Control Analysis written by Daniel Vernon Guerrant has been approved for the Department of Aerospace Engineering Sciences ________________________________________ Dr. Dale A. Lawrence ________________________________________ Dr. W. Keats Wilkie Date______________ The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. Guerrant, Daniel Vernon (Ph.D., Aerospace Engineering Sciences) Performance Quantification of Heliogyro Solar Sails Using Structural, Attitude, and Orbital Dynamics and Control Analysis Thesis directed by Professor Dale A. Lawrence Solar sails enable or enhance exploration of a variety of destinations both within and without the solar system. The heliogyro solar sail architecture divides the sail into blades spun about a central hub and centrifugally stiffened. The resulting structural mass savings can often double acceleration verses kite-type square sails of the same mass. Pitching the blades collectively and cyclically, similar to a helicopter, creates attitude control moments and vectors thrust. The principal hurdle preventing heliogyros’ implementation is the uncertainty in their dynamics. -

Solar Sail Heliocentric Earth-Following Orbits
Solar Sail Heliocentric Earth-Following Orbits Jeannette Heiligers1 and Colin R. McInnes2 University of Strathclyde, Glasgow, G1 1XJ I. Introduction Solar sail technology development is rapidly gaining momentum after recent successes such as JAXA’s IKAROS mission [1] and NASA’s NanoSail-D2 mission [2]. Research in the field is flourishing and new solar sail initiatives, such as NASA’s Sunjammer mission, are scheduled for the future [3]. Solar sails exploit the radiation pressure generated by solar photons reflecting off a large, highly reflecting sail to produce a continuous thrust force. They are therefore not constrained by propellant mass [4], which gives them huge potential for long-lifetime and high-energy mission concepts and enables a range of novel applications. One such family of applications are non- Keplerian orbits (NKOs) [5, 6], where the force due to solar radiation pressure on a solar sail is used to displace an orbit away from a natural Keplerian orbit. Different types of NKOs exist, including NKOs in the two-body problem (either Sun-centered or Earth-centered) and NKOs in the well-known circular restricted three-body problem (CR3BP). In the Sun-centered two-body problem, NKOs are determined by considering the solar sail spacecraft dynamics in a rotating frame of reference. By setting the time derivatives of the position vector equal to zero, equilibrium solutions are found in the rotating frame that correspond to displaced circular orbits in an inertial frame. Such Sun-centred NKOs allow a spacecraft to be synchronous with a planet at any heliocentric distance inward from the target planet and/or to displace a solar sail spacecraft out of the ecliptic plane for solar polar observations, 1 Research Associate, Advanced Space Concepts Laboratory, Department of Mechanical and Aerospace Engineering, James Weir Building, 75 Montrose Street, Glasgow, G1 1XJ, UK, [email protected]. -

Orbit Transfer Problems and the Results You Obtained
MS&E 315 and CME 304 Solar sailing between Earth and Mars 1 Overview In this project, you will use your knowledge of nonlinear optimization to help a space agency design a cargo mission. The mission consists of making a cargo spacecraft perform interplanetary orbit transfers between Earth and Mars, and the agency is considering using a solar sail to propel the spacecraft. They need you to determine how the spacecraft should be operated to perform these orbit transfers in the shortest possible time for different solar sail technologies. 2 Mission information 2.1 Simplifications The agency has determined that the following simplifications are acceptable for your analysis: 1. Orbits are heliocentric, circular and co-planar. 2. Gravitational effects due to celestial bodies other than the Sun are ignored. 3. The Sun and spacecraft are modeled as point masses. 4. The Sun has spherically symmetric gravitational and radiation fields. 2.2 Problem description The problem you have to solve consists of determining how the solar sail of the spacecraft should be oriented to make the spacecraft perform each of the interplanetary orbit transfers Earth-Mars and Mars-Earth in the shortest possible time. You have to perform this analysis for some, say three, of the available solar sail technologies so that the agency can choose the most appropriate one in terms of cost and performance. Each solar sail technology is identified by a characteristic acceleration, as described in the next subsection. Figure1 shows a diagram of the orbits of interest, where rE and !E denote the radius and angular velocity, respectively, of Earth's orbit around the Sun, and rM and !M denote the radius and angular velocity, respectively, of Mars's orbit around the Sun. -

Near Earth Asteroid Scout Mission AIAA Space 2014 7 August 2014
Near Earth Asteroid Scout Mission AIAA Space 2014 7 August 2014 Andrew Heaton (NASA/MSFC) Julie Castillo-Rogez (JPL/Caltech/NASA) Andreas Frick (JPL/Caltech/NASA) Wayne Hartford (JPL/Caltech/NASA) Les Johnson (NASA/MSFC) Laura Jones (JPL/Caltech/NASA) Leslie McNutt (NASA/MSFC) And the NEA Scout Team SLS EM-1 Secondary Payload Overview • HEOMD’s Advanced Exploration Systems (AES) selected 3 concepts for further refinement toward a combined Mission Concept Review (MCR) and System Requirements Review (SRR) planned for August 2014 • Primary selection criteria: - Relevance to Space Exploration Strategic Knowledge Gaps (SKGs) - Life cycle cost - Synergistic use of previously demonstrated technologies - Optimal use of available civil servant workforce • Project in Pre-formulation • Completed a Non-Advocate Review of the Science Plan Payload Strategic Knowledge Gaps Mission Concept NASA Centers Addressed BioSentinel Human health/performance in high- Study radiation-induced DNA ARC/JSC radiation space environments damage of live organisms in cis- • Fundamental effects on biological systems lunar space; correlate with of ionizing radiation in space environments measurements on ISS and Earth Lunar Flashlight Lunar resource potential Locate ice deposits in the Moon’s JPL/MSFC • Quantity and distribution of water and other permanently shadowed craters volatiles in lunar cold traps Near Earth Asteroid (NEA) Human NEA mission target identification Flyby/rendezvous and Scout • NEA size, rotation state (rate/pole position) characterize one NEA that is -

Hybrid Solar Sails for Active Debris Removal Final Report
HybridSail Hybrid Solar Sails for Active Debris Removal Final Report Authors: Lourens Visagie(1), Theodoros Theodorou(1) Affiliation: 1. Surrey Space Centre - University of Surrey ACT Researchers: Leopold Summerer Date: 27 June 2011 Contacts: Vaios Lappas Tel: +44 (0) 1483 873412 Fax: +44 (0) 1483 689503 e-mail: [email protected] Leopold Summerer (Technical Officer) Tel: +31 (0)71 565 4192 Fax: +31 (0)71 565 8018 e-mail: [email protected] Ariadna ID: 10-6411b Ariadna study type: Standard Contract Number: 4000101448/10/NL/CBi Available on the ACT website http://www.esa.int/act Abstract The historical practice of abandoning spacecraft and upper stages at the end of mission life has resulted in a polluted environment in some earth orbits. The amount of objects orbiting the Earth poses a threat to safe operations in space. Studies have shown that in order to have a sustainable environment in low Earth orbit, commonly adopted mitigation guidelines should be followed (the Inter-Agency Space Debris Coordination Committee has proposed a set of debris mitigation guidelines and these have since been endorsed by the United Nations) as well as Active Debris Removal (ADR). HybridSail is a proposed concept for a scalable de-orbiting spacecraft that makes use of a deployable drag sail membrane and deployable electrostatic tethers to accelerate orbital decay. The HybridSail concept consists of deployable sail and tethers, stowed into a nano-satellite package. The nano- satellite, deployed from a mothership or from a launch vehicle will home in towards the selected piece of space debris using a small thruster-propulsion firing and magnetic attitude control system to dock on the debris. -

Propulsion Systems for Interstellar Exploration
The Future of Electric Propulsion: A Young Visionary Paper Competition 35th International Electric Propulsion Conference October 8-12, 2017 Atlanta, Georgia Propulsion Systems for Interstellar Exploration Steven L. Magnusen Embry-Riddle Aeronautical University, Daytona Beach, FL, USA Alfredo D. Tuesta∗ National Research Council Postdoctoral Associate, Washington, DC, USA [email protected] August 4, 2017 Abstract The idea of manned spaceships exploring nearby star systems, although difficult and unlikely in this generation or the next, is becoming less a tale of science fiction and more a concept of rigorous scientific interest. In 2003, NASA sent two rovers to Mars and returned images and data that would change our view of the planet forever. Already, scientists and engineers are proposing concepts for manned missions to the Red Planet. As we prepare to visit the planets in our solar system, we dare to explore the possibilities and venues to travel beyond. With NASA’s count of known exoplanets now over 3,000 and growing, interest in interstellar science is being renewed as well. In this work, the authors discuss the benefits and deficiencies of current and emerging technologies in electric propulsion for outer planet and extrasolar exploration and propose innovative and daring concepts to further the limits of present engineering. The topics covered include solar and electric sails and beamed energy as propulsion systems. I. Introduction Te Puke is the name for the voyaging canoe that the Polynesians developed to sail across vast distances in the Pacific Ocean at the turn of the first millennium. This primitive yet sophisticated canoe, made of two hollowed out tree trunks and crab claw sails woven together from leaves, allowed Polynesian sailors to navigate the open ocean by studying the stars. -

Sunjammer Solar Sail Demonstration
Sunjammer Solar Sail Demonstration June 7, 2012 L’Garde Inc Tustin CA 5.12 Slide 1 (of 15) Sunjammer Name Sunjammer is a story by the late Sir Arthur C. Clarke that detailed a race of solar sail yachts. The coining of the term “solar sailing” is attributed to this story. Sir Clarke’s estate has granted permission for L’Garde/NASA to use the name for this mission. Dear Mr Barnes Georgia is away at the moment, but on her behalf I am pleased to be able to let you know that we may grant you non-exclusive permission to use 'Sunjammer' as the name of your NASA mission. Please would you keep Georgia informed of what happens next? I would also be grateful if you could send updates to the Arthur C Clarke Foundation in the US informed, especially its Vice Chair, Professor Joseph Pelton, who has worked on space transport systems for decades. His address is [email protected] Thanks and best wishes Marigold Marigold Atkey Assistant to Anthony Goff and Andrew Gordon David Higham Associates [Literary, Film & TV Agents] T +44 (0)20 7434 5900 www.davidhigham.co.uk 5.12 Slide 2 (of 15) NASA Office of Chief Technologist (OCT) Space Technology - Technology Demonstration Mission (TDM) 10 OCT Space Technology Programs 1. Space Technology Research Grants (GRC) 2. NIAC (HQ) 3. SBIR/STTR (ARC) 4. Centennial Challenges (MSFC) 5. Center Innovation Fund (HQ) 6. Game Changing Development (LaRC) 7. Franklin Small Satellite Subsystem Technology (ARC) 8. Edison Small Satellite Missions (ARC) 9. Flight Opportunities (DFRC) 10. -
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion and 3D Path Planning
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion And 3D Path Planning Item Type text; Electronic Thesis Authors Wilburn, Greg Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 07/10/2021 15:36:40 Link to Item http://hdl.handle.net/10150/636641 ADVANCING ASTEROID SURFACE EXPLORATION USING SUBLIMATE-BASED REGENERATIVE MICROPROPULSION AND 3D PATH PLANNING by Greg Wilburn ____________________________ Copyright © Greg Wilburn 2019 A Thesis Submitted to the Faculty of the DEPARTMENT OF AEROSPACE AND MECHANICAL ENGINEERING In Partial Fulfillment of the Requirements For the Degree of MASTER OF SCIENCE In the Graduate College THE UNIVERSITY OF ARIZONA 2019 Acknowledgements The author would first like to thank his thesis committee members for their help and direction in solving some of the complex problems in this work. The author acknowledges the time and effort of his advisor, Dr. Jekan Thangavelauthum, for his guidance over the entire course of the project. Recognition is deserved for Dr. Erik Asphaug and Dr. Stephen Schwarz for their development of the AMIGO robot concept. The development of MEMS systems presented could not have been done without the coursework and guidance from Dr. Eniko Enikov. Special thanks goes to my friends and family who have supported and encouraged me through my graduate studies. I couldn’t have done it without you, Emilia! 3 Table of Contents I. -
NOAA Space Weather Observational Programs Status Dr
NOAA Space Weather Observational Programs Status Dr. Thomas Burns Deputy Assistant Administrator for Systems National Environmental Satellite, Data, and Information Service October 31, 2013 NOAA Space Weather Satellite Observing Capabilities • POES – Space Environment Monitor (SEM-2), consisting of the Total Energy Detector (TED) and Medium Energy Proton and Electron Detector (MEPED) • GOES R –the continuation of decades of backbone space weather observations of solar imagery (SUVI), x-ray and extreme ultraviolet (EUV) flux (EXIS), and energetic particles and magnetic fields (SEISS) at geostationary orbit • JPSS -VIIRS night band observations of the auroral oval • COSMIC –GPS radio occultation measurements for ionospheric scintillation and specification • DSCOVR –the continuation of solar wind measurements after ACE • Future Technology –NASA’s Sunjammer –a test of advanced propulsion and its uses for, and effect on, solar wind measurements 2 GOES-R Series Overview Benefits Primarily atmospheric weather - Maintains continuity of weather observations and critical environmental data from geostationary orbit Provides improved warning of solar events to minimize impact to satellites, communications, manned space, navigation systems, and power grids GOES-R Launch Readiness Date* 2QFY2016 4 Satellites (GOES-R, S, T & U) Program Architecture 10 year operational design life for each spacecraft Program Operational Life FY 2017 –FY 2036 Program Life-cycle* $10.860 billion *Launch Readiness Date based on FY 2014 President’s Budget Request * 3 Recent -

Space Propulsion Technology for Small Spacecraft
Space Propulsion Technology for Small Spacecraft The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Krejci, David, and Paulo Lozano. “Space Propulsion Technology for Small Spacecraft.” Proceedings of the IEEE, vol. 106, no. 3, Mar. 2018, pp. 362–78. As Published http://dx.doi.org/10.1109/JPROC.2017.2778747 Publisher Institute of Electrical and Electronics Engineers (IEEE) Version Author's final manuscript Citable link http://hdl.handle.net/1721.1/114401 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ PROCC. OF THE IEEE, VOL. 106, NO. 3, MARCH 2018 362 Space Propulsion Technology for Small Spacecraft David Krejci and Paulo Lozano Abstract—As small satellites become more popular and capa- While designations for different satellite classes have been ble, strategies to provide in-space propulsion increase in impor- somehow ambiguous, a system mass based characterization tance. Applications range from orbital changes and maintenance, approach will be used in this work, in which the term ’Small attitude control and desaturation of reaction wheels to drag com- satellites’ will refer to satellites with total masses below pensation and de-orbit at spacecraft end-of-life. Space propulsion 500kg, with ’Nanosatellites’ for systems ranging from 1- can be enabled by chemical or electric means, each having 10kg, ’Picosatellites’ with masses between 0.1-1kg and ’Fem- different performance and scalability properties. The purpose tosatellites’ for spacecrafts below 0.1kg. In this category, the of this review is to describe the working principles of space popular Cubesat standard [13] will therefore be characterized propulsion technologies proposed so far for small spacecraft.