Phd Thesis, University of the Armed Forces Germany, 2003
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
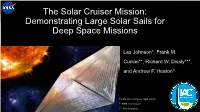
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions Les Johnson*, Frank M. Curran**, Richard W. Dissly***, and Andrew F. Heaton* * NASA Marshall Space Flight Center ** MZBlue Aerospace NASA Image *** Ball Aerospace Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. NASA Image 2 Solar Sail Missions Flown (as of October 2019) NanoSail-D (2010) IKAROS (2010) LightSail-1 (2015) CanX-7 (2016) InflateSail (2017) NASA JAXA The Planetary Society Canada EU/Univ. of Surrey Earth Orbit Interplanetary Earth Orbit Earth Orbit Earth Orbit Deployment Only Full Flight Deployment Only Deployment Only Deployment Only 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 3U CubeSat 10 m2 196 m2 32 m2 <10 m2 10 m2 3 Current and Planned Solar Sail Missions CU Aerospace (2018) LightSail-2 (2019) Near Earth Asteroid Solar Cruiser (2024) Univ. Illinois / NASA The Planetary Society Scout (2020) NASA NASA Earth Orbit Earth Orbit Interplanetary L-1 Full Flight Full Flight Full Flight Full Flight In Orbit; Not yet In Orbit; Successful deployed 6U CubeSat 90 Kg Spacecraft 3U CubeSat 86 m2 >1200 m2 3U CubeSat 32 m2 20 m2 4 Near Earth Asteroid Scout The Near Earth Asteroid Scout Will • Image/characterize a NEA during a slow flyby • Demonstrate a low cost asteroid reconnaissance capability Key Spacecraft & Mission Parameters • 6U cubesat (20cm X 10cm X 30 cm) • ~86 m2 solar sail propulsion system • Manifested for launch on the Space Launch System (Artemis 1 / 2020) • 1 AU maximum distance from Earth Leverages: combined experiences of MSFC and JPL Close Proximity Imaging Local scale morphology, with support from GSFC, JSC, & LaRC terrain properties, landing site survey Target Reconnaissance with medium field imaging Shape, spin, and local environment NEA Scout Full Scale EDU Sail Deployment 6 Solar Cruiser Mission Concept Mission Profile Solar Cruiser may launch as a secondary payload on the NASA IMAP mission in October, 2024. -
Warren and Taylor-2014-In Tog-The Moon-'Author's Personal Copy'.Pdf
This article was originally published in Treatise on Geochemistry, Second Edition published by Elsevier, and the attached copy is provided by Elsevier for the author's benefit and for the benefit of the author's institution, for non- commercial research and educational use including without limitation use in instruction at your institution, sending it to specific colleagues who you know, and providing a copy to your institution’s administrator. All other uses, reproduction and distribution, including without limitation commercial reprints, selling or licensing copies or access, or posting on open internet sites, your personal or institution’s website or repository, are prohibited. For exceptions, permission may be sought for such use through Elsevier's permissions site at: http://www.elsevier.com/locate/permissionusematerial Warren P.H., and Taylor G.J. (2014) The Moon. In: Holland H.D. and Turekian K.K. (eds.) Treatise on Geochemistry, Second Edition, vol. 2, pp. 213-250. Oxford: Elsevier. © 2014 Elsevier Ltd. All rights reserved. Author's personal copy 2.9 The Moon PH Warren, University of California, Los Angeles, CA, USA GJ Taylor, University of Hawai‘i, Honolulu, HI, USA ã 2014 Elsevier Ltd. All rights reserved. This article is a revision of the previous edition article by P. H. Warren, volume 1, pp. 559–599, © 2003, Elsevier Ltd. 2.9.1 Introduction: The Lunar Context 213 2.9.2 The Lunar Geochemical Database 214 2.9.2.1 Artificially Acquired Samples 214 2.9.2.2 Lunar Meteorites 214 2.9.2.3 Remote-Sensing Data 215 2.9.3 Mare Volcanism -

The Association Between the Lunar Cycle and Patterns
THE ASSOCIATION BETWEEN THE LUNAR CYCLE AND PATTERNS OF PATIENT PRESENTATION TO THE EMERGENCY DEPARTMENT. Grant Dudley Futcher Student number: 7709742 A research report submitted to the Faculty of Health Sciences, University of the Witwatersrand, in partial fulfilment of the requirements for the degree of Master of Science in Medicine in Emergency Medicine. Johannesburg, 2015 i DECLARATION I, Grant Dudley Futcher, declare that this research report is my own work. It is being submitted for the degree of Master of Science in Medicine (Emergency Medicine) in the University of the Witwatersrand, Johannesburg. It has not been submitted before for any degree or examination at this or any other University. Signed on 25th day of August 2015 ii DEDICATION This work is dedicated to my children, Charis, Luke and Jarryd, who have patiently endured their father’s choice of medical discipline. iii PUBLICATIONS ARISING FROM THIS STUDY Nil iv ABSTRACT Aim: To determine any association between the lunar synodic or anomalistic months and the nature and volume of emergency department patient consultations and hospital admissions from the emergency department (ED). Design: A retrospective, descriptive study. Setting: All South African EDs of a private hospital group. Patients: All patients consulted from 01 January 2005 to 31 December 2010. Methods: Data was extracted from monthly records and statistically evaluated, controlling for calendric variables. Lunar variables were modelled with volumes of differing priority of hospital admissions and consultation categories including; trauma, medical, paediatric, work injuries, obstetrics and gynaecology, intentional self harm, sexual assault, dog bites and total ED consultations. Main Results: No significant differences were found in all anomalistic and most synodic models with the consultation categories. -

Secondary Resonances Due to the Solar Radiation Pressure in the Vicinity of the Global Navigation Satellites Regions
DOI: 10.13009/EUCASS2019-420 8TH EUROPEAN CONFERENCE FOR AERONAUTICS AND SPACE SCIENCES (EUCASS) Secondary resonances due to the solar radiation pressure in the vicinity of the global navigation satellites regions Eduard Kuznetsov, Vladislav Gusev and Ivan Malyutin Ural Federal University Lenina Avenue, 51, Yekaterinburg, Russia 620000, [email protected] Abstract The secondary resonances due to solar radiation pressure are investigated in the vicinity of orbits of the global navigation systems GLONASS (main resonance is 8:17), GPS (main resonance is 1:2), BeiDou (main resonance is 7:13), and Galileo (main resonance is 10:17). The secondary resonances were considered for both the main resonances and the sub-resonances i- and e-types. The secondary resonances locations were estimated analytically and were improved by numerically. The secondary resonance zones were found for both low (0.02, 0.2, and 1 m2/kg) and high (10 m2/kg and more) area- to-mass ratios. The secondary resonances have a significant effect on the dynamical evolution of objects with area-to-mass ratio 10 m2/kg and more. This result is very important when describing the long-term orbital evolution of space debris. 1. Introduction Valk et al. [1] found a relevant class of secondary resonances on both sides of the well-known pendulum-like pattern of geostationary objects. They have considered the secondary resonances due to solar radiation pressure with a resonant argument Ψ = 푘Φ ± 휆⨀. Here Φ is a resonant argument of a main resonance 1:1 and 휆⨀ is the ecliptic longitude of the Sun. The secondary resonances were detected for objects with high area-to-mass ratio γ = 10 m2/kg and more. -

Orbit Transfer Problems and the Results You Obtained
MS&E 315 and CME 304 Solar sailing between Earth and Mars 1 Overview In this project, you will use your knowledge of nonlinear optimization to help a space agency design a cargo mission. The mission consists of making a cargo spacecraft perform interplanetary orbit transfers between Earth and Mars, and the agency is considering using a solar sail to propel the spacecraft. They need you to determine how the spacecraft should be operated to perform these orbit transfers in the shortest possible time for different solar sail technologies. 2 Mission information 2.1 Simplifications The agency has determined that the following simplifications are acceptable for your analysis: 1. Orbits are heliocentric, circular and co-planar. 2. Gravitational effects due to celestial bodies other than the Sun are ignored. 3. The Sun and spacecraft are modeled as point masses. 4. The Sun has spherically symmetric gravitational and radiation fields. 2.2 Problem description The problem you have to solve consists of determining how the solar sail of the spacecraft should be oriented to make the spacecraft perform each of the interplanetary orbit transfers Earth-Mars and Mars-Earth in the shortest possible time. You have to perform this analysis for some, say three, of the available solar sail technologies so that the agency can choose the most appropriate one in terms of cost and performance. Each solar sail technology is identified by a characteristic acceleration, as described in the next subsection. Figure1 shows a diagram of the orbits of interest, where rE and !E denote the radius and angular velocity, respectively, of Earth's orbit around the Sun, and rM and !M denote the radius and angular velocity, respectively, of Mars's orbit around the Sun. -

37131054409156D.Pdf
YEZAD A Romance of the Unknown By GEORGE BABCOCK PUBLISHED BY CO-OPERATIVE PUBLISHING CO., INC. BRIDGEPORT, CONN. NEW YORK, N. Y. Copyright, November, 1922, by GEORGE BABCOCK All rights reserved To MY S1sTER, EVA STANTON (BABCOCK) BROWNING., this story 1s affectionately inscribed. GEORGE BABCOCK. Brooklyn, N. Y. November, 19ff. CHARACTERS l JOHN BACON, Aviator. 2 JuLIA BACON, His Wife. 3 PAUL BACON, Son. 4 ELLEN BACON, Daughter. 5 AnoLPH VON PosEN, Inventor, in love. 6 SALLY T1MPOLE, the Cook, also in love. 7 JASPER PERKINS } 8 SILAS CUMMINGS The old quaint cronies. 9 NANCY PRINDLE 10 DOCTOR PETER KLOUSE. 11 HESTER DOUGLASS} 12 F IN LEY D OU GLASS Grandchildren of the Doctor. 13 SAM WILLIS, the dreadful liar. 14 WILLIAM THADDEUS TITUS, Champion of several trades. 15 WILLIAM GRENNELL, the Village Blacksmith. 16 MINNA BACON } 17 B RENDA B ACON Children of Paul and Hester. 18 RoBERT DouGLAss, Son of Finley and Ellen. 19 CHARLOTTE Dun LEY, a Maiden of Mars. 20 CHRISTOPHER SPENCER, Astronomer of Mars. 21 FELIX CLAUDIO, the Devil's Son. 22 DocToR NATHAN ELIZABRAT of Mars. 23 MARCOMET, a Guard of the Great White \Vay. 24 JOHN BACON'S DUALITY. Note:-A Glossary of coined and unusual words and their mean ing, used by the author in Yezad, will be found on pages 449 to 463. CONTENTS CHAPTER PAGE I THE PRICE OF PROGRESS 1 II THE GHOST • 20 III NEW NEIGHBORS 33 IV DOCTOR KLOUSE 45 V HEREDITY VS. KLOUSE PHILOSOPHY 52 VI A DREADFUL LIAR • 57 VII AMONG THE ABORIGINES 71 VIII AN ODD EXPERIMENT . -

Hybrid Solar Sails for Active Debris Removal Final Report
HybridSail Hybrid Solar Sails for Active Debris Removal Final Report Authors: Lourens Visagie(1), Theodoros Theodorou(1) Affiliation: 1. Surrey Space Centre - University of Surrey ACT Researchers: Leopold Summerer Date: 27 June 2011 Contacts: Vaios Lappas Tel: +44 (0) 1483 873412 Fax: +44 (0) 1483 689503 e-mail: [email protected] Leopold Summerer (Technical Officer) Tel: +31 (0)71 565 4192 Fax: +31 (0)71 565 8018 e-mail: [email protected] Ariadna ID: 10-6411b Ariadna study type: Standard Contract Number: 4000101448/10/NL/CBi Available on the ACT website http://www.esa.int/act Abstract The historical practice of abandoning spacecraft and upper stages at the end of mission life has resulted in a polluted environment in some earth orbits. The amount of objects orbiting the Earth poses a threat to safe operations in space. Studies have shown that in order to have a sustainable environment in low Earth orbit, commonly adopted mitigation guidelines should be followed (the Inter-Agency Space Debris Coordination Committee has proposed a set of debris mitigation guidelines and these have since been endorsed by the United Nations) as well as Active Debris Removal (ADR). HybridSail is a proposed concept for a scalable de-orbiting spacecraft that makes use of a deployable drag sail membrane and deployable electrostatic tethers to accelerate orbital decay. The HybridSail concept consists of deployable sail and tethers, stowed into a nano-satellite package. The nano- satellite, deployed from a mothership or from a launch vehicle will home in towards the selected piece of space debris using a small thruster-propulsion firing and magnetic attitude control system to dock on the debris. -

Propulsion Systems for Interstellar Exploration
The Future of Electric Propulsion: A Young Visionary Paper Competition 35th International Electric Propulsion Conference October 8-12, 2017 Atlanta, Georgia Propulsion Systems for Interstellar Exploration Steven L. Magnusen Embry-Riddle Aeronautical University, Daytona Beach, FL, USA Alfredo D. Tuesta∗ National Research Council Postdoctoral Associate, Washington, DC, USA [email protected] August 4, 2017 Abstract The idea of manned spaceships exploring nearby star systems, although difficult and unlikely in this generation or the next, is becoming less a tale of science fiction and more a concept of rigorous scientific interest. In 2003, NASA sent two rovers to Mars and returned images and data that would change our view of the planet forever. Already, scientists and engineers are proposing concepts for manned missions to the Red Planet. As we prepare to visit the planets in our solar system, we dare to explore the possibilities and venues to travel beyond. With NASA’s count of known exoplanets now over 3,000 and growing, interest in interstellar science is being renewed as well. In this work, the authors discuss the benefits and deficiencies of current and emerging technologies in electric propulsion for outer planet and extrasolar exploration and propose innovative and daring concepts to further the limits of present engineering. The topics covered include solar and electric sails and beamed energy as propulsion systems. I. Introduction Te Puke is the name for the voyaging canoe that the Polynesians developed to sail across vast distances in the Pacific Ocean at the turn of the first millennium. This primitive yet sophisticated canoe, made of two hollowed out tree trunks and crab claw sails woven together from leaves, allowed Polynesian sailors to navigate the open ocean by studying the stars. -
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion and 3D Path Planning
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion And 3D Path Planning Item Type text; Electronic Thesis Authors Wilburn, Greg Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 07/10/2021 15:36:40 Link to Item http://hdl.handle.net/10150/636641 ADVANCING ASTEROID SURFACE EXPLORATION USING SUBLIMATE-BASED REGENERATIVE MICROPROPULSION AND 3D PATH PLANNING by Greg Wilburn ____________________________ Copyright © Greg Wilburn 2019 A Thesis Submitted to the Faculty of the DEPARTMENT OF AEROSPACE AND MECHANICAL ENGINEERING In Partial Fulfillment of the Requirements For the Degree of MASTER OF SCIENCE In the Graduate College THE UNIVERSITY OF ARIZONA 2019 Acknowledgements The author would first like to thank his thesis committee members for their help and direction in solving some of the complex problems in this work. The author acknowledges the time and effort of his advisor, Dr. Jekan Thangavelauthum, for his guidance over the entire course of the project. Recognition is deserved for Dr. Erik Asphaug and Dr. Stephen Schwarz for their development of the AMIGO robot concept. The development of MEMS systems presented could not have been done without the coursework and guidance from Dr. Eniko Enikov. Special thanks goes to my friends and family who have supported and encouraged me through my graduate studies. I couldn’t have done it without you, Emilia! 3 Table of Contents I. -

Space Propulsion Technology for Small Spacecraft
Space Propulsion Technology for Small Spacecraft The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Krejci, David, and Paulo Lozano. “Space Propulsion Technology for Small Spacecraft.” Proceedings of the IEEE, vol. 106, no. 3, Mar. 2018, pp. 362–78. As Published http://dx.doi.org/10.1109/JPROC.2017.2778747 Publisher Institute of Electrical and Electronics Engineers (IEEE) Version Author's final manuscript Citable link http://hdl.handle.net/1721.1/114401 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ PROCC. OF THE IEEE, VOL. 106, NO. 3, MARCH 2018 362 Space Propulsion Technology for Small Spacecraft David Krejci and Paulo Lozano Abstract—As small satellites become more popular and capa- While designations for different satellite classes have been ble, strategies to provide in-space propulsion increase in impor- somehow ambiguous, a system mass based characterization tance. Applications range from orbital changes and maintenance, approach will be used in this work, in which the term ’Small attitude control and desaturation of reaction wheels to drag com- satellites’ will refer to satellites with total masses below pensation and de-orbit at spacecraft end-of-life. Space propulsion 500kg, with ’Nanosatellites’ for systems ranging from 1- can be enabled by chemical or electric means, each having 10kg, ’Picosatellites’ with masses between 0.1-1kg and ’Fem- different performance and scalability properties. The purpose tosatellites’ for spacecrafts below 0.1kg. In this category, the of this review is to describe the working principles of space popular Cubesat standard [13] will therefore be characterized propulsion technologies proposed so far for small spacecraft. -

Analysis of the Influence of Lunar Cycle on the Frequency of Spontaneous Deliveries: a Single-Centre Retrospective Study
Original Article VOL. 12 | NO. 4 | ISSUE 48 | OCT- DEC 2014 Analysis of the Influence of Lunar Cycle on the Frequency of Spontaneous Deliveries: A Single-centre Retrospective Study. Laganà AS,1 Burgio MA,2 Retto G,1 Pizzo A,1 Sturlese E,1 Granese R,1 Chiofalo B,1 Ciacimino L,1 Triolo O1 1Department of Pediatric, Gynecological, ABSTRACT Microbiological and Biomedical Sciences Background University of Messina, Via C. Valeria 1, 98125 Messina - Italy. Man, since ancient times, has been convinced of, and has researched scientific 2Department of Gynecology and Obstetrics evidence that the barometric and gravitational forces play an important role in structural and biological variation of the planets, influencing the various forms of Palermo Civic Hospital and National Center of life. In particular, the synergistic relationships between variations in atmospheric Clinical Excellence (ARNAS Di Cristina-Benfratelli) Palermo, Italy. pressure and gravitational forces on human gestation period have been the subject of rigorous observations and statistical calculations, which have not led to a Corresponding Author universal conclusion in literature. Antonio Simone Laganà Objectives Department of Pediatric, Gynecological, The aim of our work was to check whether there is a higher incidence of spontaneous Microbiological and Biomedical Sciences deliveries, during the periods of full Moon than during the other phases of the University of Messina, Via C. Valeria 1, 98125 Moon. Messina - Italy. Methods Email: [email protected] We performed a retrospective analysis of 327 non-induced vaginal deliveries in a year, divided by month. We subsequently analyzed the incidence of these deliveries during periods of full Moon Vs other lunar phases. -
Comparison of the Solar Sail with Electric Propulsion Systems
.:- .:- &,, NASA CONTRACTOR REPORT *o Qo COMPARISON OF THE SOLAR SAIL WITH ELECTRIC PROPULSION SYSTEMS Prepared by . -... THE MACNEAL-SCHWENDLER CORPORATION Los Angeles, Calif. 90041 for . .. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION. WASHINGTON, D. c. ea FEBRUARY 1972 TECH LIBRARY KAFB, NM 1. Report No. 2. Government Accession No. NASA CR-1986 I 4. Title and Subtitle 5. Report Date COMPARISON OF THE SOLAR SAIL WITH ELECTRIC February 1972 PROPULSIONSYSTEMS 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Richard H. MacNeal 'EMSR 13A 10. Work Unit No. 9. Performing Organization Name and Address The MacNeal-SchwendlerCorpmTtkCm ~-~ 74.42 NO. FigueroaStreet 11. Contract or Grant No. Los Angeles , California90041 NAS7-699 13. Type of Re rt and Period Covered 2. Sponsoring AgencyName and Address ContracGr NationalAeronautics and Space Administration FinalReport Washington, D. C. 20546 14. Sponsoring AgencyCade RWS 5. Supplementary Notes 6. Abstract A studyof the propulsive efficiencies of solar sails and electric propulsionsystems which shows increasing efficiency for solar sails for. launch mission durations. 7. Key- Words (Suggested by Author(s) 1 18. Distribution Statement Solar sails, electricpropulsion systems Unlimited advancedspace concepts. i ~~ "- .. 19. Security Classif. (of this report) 20. Security Classif. (of this page) 21. No. of Pages 22. Price' Unclassified Unclassified 13 $3 .?70 For sale by the National Technical InformationService, Springfield, Virginia 22151 COMPARISON OF THE SOLAR SA1 L WITHELECTRIC PROPULSION SYSTEMS By Richard H. MacNeal The MacNeal-SchwendlerCorporation ABSTRACT The propulsiveefficiencies of the solar sail and ofelectric propul- sion systemsare compared on the basis of specificimpulse. It is shown thatthe solar sail is more efficientat onea.u.