Ochsenwerder Mappe
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

NORD.Regional Band 7 STATISTIKAMT NORD
Statistisches Amt für Hamburg und Schleswig-Holstein Hamburger Stadtteil-Profile 2009 NORD.regional Band 7 STATISTIKAMT NORD Hamburger Stadtteil-Profile 2009 Band 7 der Reihe „NORD.regional“ ISSN 1863-9518 Herausgeber: Statistisches Amt für Hamburg und Schleswig-Holstein Anstalt des öffentlichen Rechts Steckelhörn 12, 20457 Hamburg Bestellungen: Telefon: 0431 6895-9280 oder 0431 6895-9122 Fax: 0431 6895-9498 E-Mail: [email protected] Auskünfte: Telefon: 040 42831-1713 Fax: 040 427964-312 E-Mail: [email protected] Internet: www.statistik-nord.de Preis: 20,50 EUR © Statistisches Amt für Hamburg und Schleswig-Holstein, 2010 Für nichtgewerbliche Zwecke sind Vervielfältigung und unentgeltliche Verbreitung, auch auszugsweise, mit Quellenangabe gestattet. Die Verbreitung, auch auszugsweise, über elektronische Systeme/Datenträger bedarf der vorherigen Zustimmung. Alle übrigen Rechte bleiben vorbehalten. Vorwort Die „Hamburger Stadtteil-Profile“ haben seit 13 Jahren ihren festen Platz in unserem Datenangebot. Die Nachfrage nach dieser jährlich erscheinenden Querschnittsveröffentlichung ist nach wie vor ungebrochen. Ein breiter Kundenkreis aus Politik und Verwaltung, Verbänden und Vereinen, Wissenschaft und interessierten Bürgerinnen und Bürgern nutzt die umfangreiche Datensammlung, sei es in der hier vorgelegten Druckfassung oder direkter und jederzeit verfügbar in unserem Internetangebot. Die Veröffentlichung bietet wie gewohnt eine Zusammenstellung von sozial-demographischen Merkmalen über Hamburger Stadtteile, Bezirke sowie ausgewählte Quartiere. Thematische Karten zu neun wichtigen Indikatoren ermöglichen einen raschen Überblick und eine Einordnung der Stadtteile. Einige Institutionen tragen regelmäßig mit ihren Daten dazu bei, dass ein umfangreiches Merk- malspektrum für Hamburger Gebietseinheiten veröffentlicht werden kann. Welche Angaben von welcher Stelle stammen, ist in den erläuternden Bemerkungen im Anhang aufgeführt. Den Ein- richtungen, die uns ihr Datenmaterial überlassen haben, sei an dieser Stelle gedankt. -

Ochsenwerder Mappe 2011
Ochsenwerder Mappe 2011 Ochsenwerder gestern Das Kirchspiel Ochsenwerder besteht aus den Orten Ochsenwerder, Tatenberg, Spadenland und Moorwerder. Bereits 1142 wurde das heutige Ochsenwerder unter dem Namen "Ameneberg" erstmals urkundlich genannt.1244 erscheint erstmals der Name eines Ochsenwerder Pfarrers in der urkundlichen Überlieferung. Das ist ein Indiz dafür, dass der Ort nun kultiviert war und bereits eine Kirche hatte. 1253 tauchte der Name Ochsenwerder, damals "Oswerthere", erstmals urkundlich auf. Der Name bedeutet „Insel auf der Ochsen weiden“. Tatenberg wurde 1315 erstmals urkundlich unter dem Namen "Tadekenberghe" erwähnt. Die erste Erwähnung Moorwerders, was einfach Moorinsel bedeutet, erfolgte 1371. Den Einwohnern Ochsenwerders wurde erlaubt die Insel zu bedeichen und zu bewirtschaften, jedoch ohne den Bau von Häusern. Das gleiche galt für den Inwerder, der als das spätere Spadenland angesehen wird, das unter seinem Namen erst im Jahre 1465 erstmals erscheint. Am 23. April 1395 kam es zum Verkauf des „Ochsenwärders“ an die Stadt Hamburg durch den Grafen von Holstein. Ochsenwerder heute Im Kirchspiel leben derzeit (Stand 2006) 3258 Personen, davon 2277 in Ochsenwerder, 454 in Spadenland und 527 in Tatenberg auf insgesamt rund 20 km². Noch heute wird die Landschaft durch ihren landwirtschaftlichen Charakter geprägt. Vorherrschend ist der traditionelle Gemüseanbau, der durch Blumenanbau ergänzt wurde. Einige Betriebe haben auf Bioproduktion umgestellt. Ochsenwerder ist heute als Naherholungsgebiet für Hamburg weithin bekannt. 1 Die ev. St. Pankratius Kirche Zum geschichtlichen der Ochsenwerder Kirche Die Gemeindekirche Ochsenwerders ist die St. Pankratiuskirche am Alten Kirchdeich in Ochsenwerder. Das Kirchspiel umfasst die Dörfer Ochsen- werder, Moorwerder, Spadenland und Tatenberg. Obwohl Moorwerder mittlerweile zum Bezirk Harburg gehört, ist es kirchlich noch immer Ochsenwerder angeschlossen. -
Tatenberger Deich Ab
Herzlich willkommen! Hamburger Yacht-Club e.V. im ADAC Hafeninformationen Alles Wissenswerte rund um den HYC für Tagesgäste, Saisongäste, Gastlieger und Mitglieder 1 Inhaltsverzeichnis Herzlich willkommen im Hamburger Yacht-Club! Herzlich willkommen! S. 3 Wir sind ein ehrenamtlich organisierter Anfahrt S. 4–5 Yachthafen für den Motorbootsport an der Dove Elbe. Mit ca. 170 Liegeplätzen Der Yachthafen Tatenberg S. 6 sind wir einer der mitgliederstärksten Umliegende Häfen an der Dove Elbe S. 7 Wassersportclubs Hamburgs. Vereinsleben S. 8–9 Wir bieten Liegeplätze für Yachten Übernachtungskosten S. 10 bis zu 5,50 m Breite und 15 m Länge. Selbstverständlich finden Sie an allen Plätzen Strom- und Hafen-Informationen von A-Z S. 10–14 Wasserversorgung vor. Bei uns liegen Sie mit Ihrem Schiff tidenunabhängig Clubrestaurant S. 15 in sehr geschützter Lage. Versorgung in unmittelbarer Nähe S. 16 Ob mit einem kleinen oder großen Boot, bei uns sind Sie herzlich Hilfreiche Adressen S. 17–18 willkommen, sei es nur für einen Tagesaufenthalt, einen vollen Monat oder Revier Dove Elbe S. 19 auch eine ganze Saison. Sie suchen einen Liegeplatz? Wir finden sicherlich einen geeigneten Platz für Sie – sprechen Sie uns gern an! Dove Elbe retten S. 20 Der Hamburger Yacht-Club ist im ADAC Marineführer gelistet und wurde Freizeit-Tipps S. 20–23 vom DMYV zum Stützpunkt erklärt – wiederholt wurden wir mit dem Mit Bus und Bahn Sightseeing in Hamburg S. 24–25 DMYV-Qualitätssiegel-maritim ausgezeichnet. Impressum S. 25 Über 21 Jahre in Folge hat unser gemeinnütziger Yacht-Club sich den Ansprechpartner S. 26–27 jährlichen internationalen Sicherheits- und Umweltaudits wie z.B. -

Raderlebnis Bergedorf Vier- Und Marschlande
3. Auflage Herzlich willkommen! R1 Vierländer Rosentour R2 Tour Hinter den Deichen R3 Elbkieker-Tour Erleben Sie diese reizvolle Landschaft am besten im Die Tour startet am -Bahnhof Billwerder-Moorfleet Wer seinen Beinen zwischendurch eine kleine Pause Ein kleiner Rundkurs im Spadenland entlang der Dei- Eine Tour entlang der Elbe, zum größten Teil am Original vor Ort. Aufgrund der Größe eignen sich die und führt entlang der kurvigen Gose Elbe vorbei an gönnen möchte, kann bei der Bootsvermietung che. Im Spadenland mussten sich ehemals die Anwoh- Innen- und Außendeich befahrbar. Diese Tour Raderlebnis Bergedorf Vier- und Marschlande besonders für einen Fahrrad- Rosengärten, alten Fachwerk häusern zum Vierländer Paddel-Meier selbst auf ein Boot umsteigen und die Land- ner selbst um den Erhalt und die Pflege der Deiche zeigt vielfältige Attraktionen der Gewässerland- ausflug. Dieser Flyer zeigt Ihnen fünf schöne Touren Rosenhof. Neben historischen Rosen können hier Züch- schaft vom Wasser aus ent decken. In Hofläden, Cafés und kümmern, andernfalls wurde das Grundstück abge- schaft: den Hafen Oortkaten, Windsurfing auf Vier- und Marschlande zum Entdecken. Insbesondere Liebhaber von Natur tungsneuheiten im Rosengarten bewundert und erwor- Restaurants gibt es gesunde Lebens mittel zur Stärkung. sprochen. Als Symbol hierfür wurde ein Spaten in den dem Hohendeicher See, Schiffsverkehr auf der und Kulturhistorie, von landwirtschaftlich gepräg- ben werden. Deich gesteckt. Die Spadenländer Spitze wurde durch Elbe, Fähre am Zollenspieker. Es befinden sich auch verschiedene Einkehrmöglichkei- ter und naturnaher Landschaft, von sportlicher Betä- die Rückverlegung der Deichlinie wieder zu einer typi- Fünf schöne Touren zum Entdecken Weiter geht die Radtour auf dem bei Fahrradfahrern ten auf der Strecke oder in der Nähe. -

Assignment of Positionally Uncertain Point Events to Regions
Assignment of positionally uncertain point events to regions Tonio Fincke, Jochen Schiewe, and Karl-Peter Traub Lab for Geoinformatics and Geovisualization (g²lab) HafenCity University Hamburg Hebebrandstraße 1, 22297 Hamburg, Germany {tonio.fincke | jochen.schiewe | karl-peter.traub} @hcu-hamburg.de http://www.hcu-hamburg.de/geomatik/g2lab 1. INTRODUCTION Although it is often not considered explicitly, positional uncertainty is a frequent issue in spatial analysis. It denotes the phenomenon that the spatial coordinates of an object do not indicate, but only approximate the actual position. As with other kinds of uncertainties, positional uncertainty can be introduced through every step of working with data. Uncertainty can be described or modeled with confidence intervals or probability density functions (Morgan, 1990; MacEachren, 2005). For modeling spatial uncertainty, buffered regions or fuzzy borders can be draped around the spatial feature. An example is the ‘Egg-Yolk’ model, where regions with indeterminate boundaries are represented by concentric regions (Cohn, 1996). Due to their special characteristics, spatial uncertainties and methods for their consideration continue to receive specific attention (Zhao, 2009; Navratil, 2008; Fisher, 2000; Shokri, 2006; Hession, 2006). For example, the 9-intersection model (Egenhofer, 1991) has been extended to uncertain geographic objects (Clementini, 1996). Locational or positional uncertainties pose special challenges (Murray, 2003; Grubesic, 2004). In a specific case, we want to count the number of emergency rescues which have occurred in several distinct city districts. The fire department of Hamburg provided data about emergencies that happened between 2005 and 2008 around a rescue service station (for former investigations of emergency rescues in Hamburg see Traub, 2003). -
Elbe3 Erholen
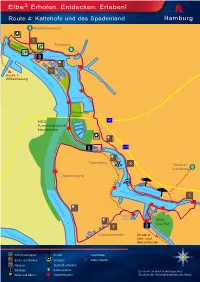
Elbe3 Erholen. Entdecken. Erleben! Route 4: Kaltehofe und das Spadenland S Rothenburgsort Entenwerder Elbpark Tiefstack S Billwerder NORDERELBE Bucht Route 1: Wilhelmsburg Holzhafen Billwerder Insel NSG A1 Auenlandschaft Norderelbe A25 Tatenberg Mittlerer Landweg S Spadenland Eichbaumsee Dove-Elbe NORDERELBE Küster- brack NSG Die Reit Gose-Elbe SÜDERELBE Ochsenwerder Route 5: Vier- und Marschlande N Sehenswürdigkeit Strand Hauptroute W O Essen und Trinken Golfplatz Nebenstrecke Museum Yacht-/Bootshafen S S Schleuse S-Bahnstation Die Karte ist nicht maßstabsgetreu. Parks und Gärten Aussichtspunkt Sie dient der Veranschaulichung der Route. Elbe³ Erholen. Entdecken. Erleben! Route 4: Kaltehofe und das Spadenland Mit dem Fahrrad entlang der Norderelbe und Dove-Elbe Wegstrecke: Fahrradrundweg mit leichtem und ebenem Streckenverlauf Start: S-Bahnstation Rothenburgsort Ziel: S-Bahnstation Rothenburgsort Gesamtlänge der Strecke: ca. 29,7 km Ca. Km Teilstrecke Beschreibung der Route 0 km 0,7 km S-Bahnstation Rothenburgsort: links abbiegen auf den Billhorner Deich Besichtigung: Wasserturm und Wassermuseum der Hamburger Wasserwerke GmbH 0,7 km 0,8 km Rechts abbiegen in die Straße Billwerder Neuer Deich 1,5 km 0,1 km Links abbiegen über eine Brücke in den Entenwerder Elbpark 1,6 km 0,9 km Fahrt durch den Elbpark und auf die Straße Entenwerder Stieg 2,5 km 0,1 km Rechts abbiegen in den Ausschläger Elbdeich Betrachtung: Traunsvilla am Traunspark 2,6 km 0,4 km Rechts abbiegen über das Sperrwerk Billwerder Bucht auf den Kaltehofer Hauptdeich Betrachtung: -

Hamburg Hamburg Presents
International Police Association InternationalP oliceA ssociation RegionRegionIPA Hamburg Hamburg presents: HamburgHamburg -- a a short short break break Tabel of contents 1. General Information ................................................................1 2. Hamburg history in brief..........................................................2 3. The rivers of Hamburg ............................................................8 4. Attractions ...............................................................................9 4.1 The port.................................................................................9 4.2 The Airport (Hamburg Airport .............................................10 4.3 Finkenwerder / Airbus Airport..............................................10 4.4 The Town Hall .....................................................................10 4.5 The stock exchange............................................................10 4.6 The TV Tower / Heinrich Hertz Tower..................................11 4.7 The St. Pauli Landungsbrücken with the (old) Elbtunnel.....11 4.8 The Congress Center Hamburg (CCH)...............................11 4.9 HafenCity and Speicherstadt ..............................................12 4.10 The Elbphilharmonie .........................................................12 4.11 The miniature wonderland.................................................12 4.12 The planetarium ................................................................13 5. The main churches of Hamburg............................................13 -

Raderlebnis Bergedorf Vier- Und Marschlande
Wo in Hamburg die Sonne aufgeht! Wir heißen Sie herzlich willkommen! R1 Vierländer Rosentour R2 Tour hinter den Deichen Für Bergedorf und die Vier- und Marschlande ist das Die 800 Jahre alte Kulturlandschaft ist geprägt von Die Tour startet am -Bahnhof Billwerder-Moor- Es befinden sich auch verschiedene Ein- Ein kleiner Rundkurs im Spadenland entlang der Jahr 2013 ein besonderes Jahr: Landwirtschaft und Gartenbau, von lebendigen Dorf- fleet und führt entlang der kurvigen Gosen Elbe kehrmöglichkeiten auf der Strecke oder in Deiche. Im Spadenland mussten sich ehemals die Raderlebnis Bergedorf gemeinschaften mit aktiven Vereinen, von Handwerks- vorbei an Rosengärten, alten Fachwerk häusern der Nähe. Anwohner selbst um den Erhalt und die Pflege der Die Internationale Gartenschau Hamburg (igs 2013) betrieben und Kleingewerbe, von reichhaltigen Kultur- zum Vierländer Rosenhof. Neben historischen Deiche kümmern, andernfalls wurde das Grundstück präsentiert auf der Elbinsel Hamburg-Wilhelmsburg Für Kulturinteressierte ist ein Blick beispielsweise in die schätzen und historischen Gebäuden, von Naturschutz- Rosen können hier Züchtungsneuheiten im Rosengarten abgesprochen. Als Symbol hierfür wurde ein Spaten die Welt der Kulturlandschaften der Metropolregion. Johanniskirche zu Neuengamme auf der Strecke oder Vier- und Marschlande gebieten, in denen viele bedrohte Arten beheimatet bewundert und erworben werden. in den Deich gesteckt. Die Spadenländer Spitze Hier stellen sich auch die Vier- und Marschlande als ein Abstecher zum Freilichtmuseum Rieck Haus (erbaut sind, vom einmaligen Landschaftsbild mit Flussläufen, wurde durch die Rückverlegung der Deichlinie wieder zentrales Naherholungsgebiet – und wichtige Kultur- Weiter geht die Radtour auf dem bei Fahrradfahrern, 1533) lohnenswert. Durch das älteste erhal tene nie- Fünf schöne Touren zum Entdecken Bracks und Grabensystemen, von Weiden und Acker- zu einer typischen Elbauenlandschaft, die als Lebens- landschaft mit regionalen Produkten vor. -

Analyse Der Bürgerschaftswahl Am 23. Februar 2020 in Hamburg
Statistisches Amt für Hamburg und Schleswig-Holstein Analyse der Bürgerschaftswahl am 23. Februar 2020 in Hamburg Endgültige Ergebnisse STATISTIKAMT NORD STATISTIKAMT NORD STATISTIKAMT Impressum Korrigierte Fassung vom 12.03.2020 Grafik 3, Seite 6 Analyse der Bürgerschaftswahl am 23. Februar 2020 in Hamburg Herausgeber: Statistisches Amt für Hamburg und Schleswig-Holstein Anstalt des öffentlichen Rechts Steckelhörn 12, 20457 Hamburg Auskünfte: Telefon: 040 42831-1766 E-Mail: [email protected] Internet: www.statistik-nord.de Zeichen und Abkürzungen – nichts vorhanden x Tabellenfach gesperrt, weil Aussage nicht sinnvoll © Statistisches Amt für Hamburg und Schleswig-Holstein, Hamburg/Kiel, 2020 Vervielfältigung und unentgeltliche Verbreitung, auch auszugsweise, mit Quellenangabe gestattet. Alle übrigen Rechte bleiben vorbehalten. Hamburg, März 2020 Inhalt Impressum ..................................................................................................................................... 2 Inhaltsverzeichnis .......................................................................................................................... 3 Endgültige Ergebnisse der Bürgerschaftswahl in Hamburg 2020 1 Ergebnisse für Hamburg Grafik 1: Wahlbeteiligung bei Bundestags-, Bürgerschafts- und Europawahlen seit 1957 .......... 4 Tabelle 1: Gesamtstimmen der Landesliste und der Wahlkreislisten, Mandatsverteilung ............. 5 Grafik 2: Verteilung der gültigen Stimmen auf ausgewählte Wahlvorschläge in Prozent ............ 6 Grafik 3: Gewinne und -
![Hydrogeologische Gebietseinheit 2 [Hg 2]: Vier- Und Marschlande](https://docslib.b-cdn.net/cover/1635/hydrogeologische-gebietseinheit-2-hg-2-vier-und-marschlande-1241635.webp)
Hydrogeologische Gebietseinheit 2 [Hg 2]: Vier- Und Marschlande
Anpassung der Fahrrinne von Unter- und Außenelbe Schutzgut Wasser / Grundwasser (Anhang II) Planfeststellungsunterlage H.2c BWS GmbH HYDROGEOLOGISCHE GEBIETSEINHEIT 2 [HG 2]: VIER- UND MARSCHLANDE Lage und Begrenzung: Die hydrogeologische Gebietseinheit 2, Vier- und Marschlande (202 km 2 Fläche), befindet sich auf der nördlichen Elbseite im östlichen Stadtgebiet Hamburgs. Es han- delt sich um ein bis zu 13 km breites Marschgebiet. Die vorherrschenden Nutzungen sind Industrie und Gewerbe (im Westen), Ackerbau und Grünland (im Osten), Sied- lung sowie Trink- und Brauchwassergewinnung. Die hydrogeologische Gebietseinheit 2 grenzt im Norden an den Geestrand, im Nordwesten an die Binnenalster und im Südwesten und Südosten an die Elbe. Sie wird von den Gewässern Bille, Dove-Elbe und Gose-Elbe durchflossen. Hydrogeologie: In der hydrogeologischen Gebietseinheit 2 befinden sich bis ca. 6 m mächtige Weich- schichten (s. Abb. II-hG2-1 und II-hG2-2), im Bereich von Fehlstellen der Weich- schichten Sand und Geschiebemergel. Dies ist vor allem in den nördlichen Randbe- reichen der Fall. Im Hafengebiet können die Weichschichten aufgrund anthropogener Bodenveränderungen bereichsweise entfernt oder in ihrer Mächtigkeit reduziert sein. Im Hafengebiet sind sie größtenteils durch Aufschüttungen überlagert. Unterhalb der Weichschichten befinden sich 15 - 25 m mächtige Sande und Kiese des oberen, quartären Grundwasserleiters. Darunter befinden sich Geschiebemergel und Glimmer- ton mit Fehlstellen im Bereich von eiszeitlichen Rinnen bzw. in Hochlagen des Ter- tiärs. Im Bereich solcher Fehlstellen ist ein hydraulischer Kontakt zu tieferen Grund- wasserleitern möglich. Im Untergrund befinden sich die Salzstöcke Geesthacht und Hohenhorn. Seite 1/1= Anpassung der Fahrrinne von Unter- und Außenelbe Schutzgut Wasser / Grundwasser (Anhang II) Planfeststellungsunterlage H.2c BWS GmbH Grundwasseranschluss und Tidebeeinflussung der Oberflächengewässer: Die Elbsohle verläuft innerhalb von Sand und Kies (oberer, quartärer Grundwasserlei- ter), es besteht Grundwasseranschluss. -

Keine Autos Auf Kaltehofe!
Keine Autos auf Kaltehofe! an Frau Senatorin Anja Hajduk, Behörde für Stadtentwicklung und Umwelt an Herrn Michael Beckereit, Hamburg Wasser Wir protestieren gegen die geplante teilweise Öffnung des Kaltehofe Hauptdeichs für Kfz-Verkehr im Zusammenhang mit dem Landschaftspark „Wasserkunst Kaltehofe“. Ein Parkplatz an der Villa und eine Zufahrt dazu am Deich würde das zerstören, was der neue Park eigentlich bewahren und erlebbar machen sollte: Die besondere Atmosphäre, die Erholsamkeit und den Zauber von Kalte- hofe. A. Jansen (Altona) Caspar Stein (Eilbek) Eva Korff (R’ort) A. Schreiber (Cuxhaven) Ch. Beier (R’ort) Eva Nitsch (R’ort) Adelheid Wolf (Harburg) Christa David (R’ort) Felix Jünemann (Bahrenfeld) Adina Döll (St. Georg) Christel Biebrach (Wilhelmsburg) Filiz Bogac (Glinde) Alexander Richter (altona) Christian Burrichter (Hoheluft) Fiona Hauschildt (Eimsbüttel) Alexander Wall (Altona) Christian Giebel (St.Georg) Fionn-O Pelka (Hamm) Alexandra Teyfel (R’ort) Christian Homfeldt (Barmbek) Fr. Blaszezak (R’ort) alfred alexander (poppenbüttel) Christian Rusche (Altona) Frank Wiesner (Harburg) André Gehmlich (R’ort) Christian Völker (Barmbek) Friedrich Tönnies (Barmbek-Süd) Andreas Hiekel (Freital/Sachsen) Christian Westerhove (Winterhude) Gabriele Langeloh (Harburg) Andreas Schwertner (Allermöhe) Christiane Krüger (Neustadt) Gerd von Borstel (Horn) Andreas Wagner (Bergstedt) Christine Ebeling (Hammerbrook) Gerda Laas (R’ort) Angela Niedenführ (Billstedt) Christine Siggelkow (R’ort) Gerhard Gerstenkorn (R’ort) Angela Schmidt (Billstedt) Christoph Dahm (Wilhelmsburg) Gertrud Zenthöfer (R’ort) Anja Oltmans (R’ort) christoph voß (st. pauli) Giesela Wiebke (R’ort) Anke-Marey Ahmels (Barmbek) Claudia Deppermann (Billstedt) Gisela Drosse (R’ort) Anne Korff (Lütjensee) Claudia Franz (Uhlenhorst) Gisela Kuczynski (R’ort) Annegret Busse (R’ort), Claudia Reiche (Uhlenhorst) Gunda Jedlicka (Bergedorf) Antje Schellner (St. -

Landschaftsschutzgebiete in Hamburg (Alphabetisch Geordnet)
Landschaftsschutzgebiete in Hamburg (alphabetisch geordnet) Datum der Name Link zum Verordnungstext Rechtsgrundlage Verordnung http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 1 LSG Allermöhe 23.03.1976 GemAllerLSchTSchVHApP2&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 1976, S. 62 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 2 LSG Altengamme 19.04.1977 GemAltenLSchTSchVHApP2&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 1977, S. 97 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 3 LSG Altona-Südwest, Ottensen, Othmarschen, Klein Flottbek, Nienstedten, Dockenhuden, Blankenese, Rissen 18.12.1962 AltonaLSchTSchVHApP2&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 1962, S. 203 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 4 LSG Bahrenfeld 13.04.1971 BahrenLSchTSchVHApP2&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 1971, S. 75 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 5 LSG Bergedorf/Lohbrügge 08.03.2005 Berged_LohbrLSchGebVHArahmen&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 2005, S. 60 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 6 LSG Boberg 08.03.2005 BobergLSchGebVHArahmen&doc.part=X&doc.origin=bs&st=lr HmbGVBl. 2005, S. 60 http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 7 LSG Boberg,weitere 04.01.1972 GemBobergwLSchTSchVHArahmen&doc.part=X&doc.origin=bs&st=lr HmbBL I 791-s http://www.juris.de/jportal/portal/page/bshaprod.psml?showdoccase=1&doc.id=jlr- 8 LSG Curslack 19.04.1977 GemCursLSchTSchVHApP2&doc.part=X&doc.origin=bs&st=lr HmbGVBl.