Title Generalized Self-Driven AC-DC Synchronous Rectification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
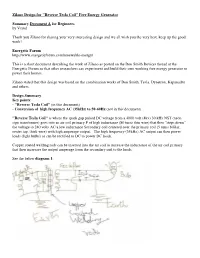
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -

Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers
energies Article Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers Yuan-Chih Lin, Ding-Tang Chen and Ching-Jan Chen * Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan; No. 1, Sec. 4, Roosevelt Rd., Taipei 10617, Taiwan * Correspondence: [email protected]; Tel.: +886-2-3366-3366 (ext. 348) Received: 9 July 2019; Accepted: 19 August 2019; Published: 21 August 2019 Abstract: LLC resonant converters with center-tapped transformers are widely used. However, these converters suffer from a flux walking issue, which causes a larger output ripple and possible transformer saturation. In this paper, a flux-balance control strategy is proposed for resolving the flux walking issue. First, the DC magnetizing current generated due to the mismatched secondary-side leakage inductances, and its effects on the voltage gain are analyzed. From the analysis, the flux-balance control strategy, which is based on the original output-voltage control loop, is proposed. Since the DC magnetizing current is not easily measured, a current sensing strategy with a current estimator is proposed, which only requires one current sensor and is easy to estimate the DC magnetizing current. Finally, a simulation scheme and a hardware prototype with rated output power 200 W, input voltage 380 V, and output voltage 20 V is constructed for verification. The simulation and experimental results show that the proposed control strategy effectively reduces the DC magnetizing current and output voltage ripple at mismatched condition. Keywords: LLC resonant converter; center-tapped transformer; flux walking; flux-balance control loop; magnetizing current estimation 1. Introduction The LLC resonant converter is widely used in many different applications such as onboard chargers, server power systems, laptops, desktops, photovoltaic regeneration systems. -

Published Articles Balun Modeling for Differential Amplifiers
Proceedings of the World Congress on Engineering and Computer Science 2019 WCECS 2019, October 22-24, 2019, San Francisco, USA Balun Modeling for Differential Amplifiers Kun Chen, Zheng Liu, Xuelin Hong, Ruinan Chang, and Weimin Sun Abstract—This work proposes an improved lumped element model. Particular for this core is an additional element which model for accurately characterizing transformer based baluns. will be shown later to play a critical role in modeling The model can accurately describe balun behaviors for both common mode behavior. Section III will derive the formulae differential and common modes. Lumped elements extraction from Y parameter is presented, and the relationship between for extracting the model elements from the Y parameter. In the proposed model and the classic compact transformer model Section IV, the differential, common and divider modes will is derived. Numerical results will be presented to validate the be analyzed separately, where we will justify the addition of accuracy of the proposed model. the extra element in the transformer core. Section V will Index Terms—balun modeling, transformer modeling, push- discuss the relationship of the proposed transformer core pull amplifiers, power amplifier (PA), compact model, differen- model with the popular compact model that is based on ideal tial mode, common mode, mutual inductance. transformers and leakage and magnitization inductances. Section VI will discuss the physics and modeling of the I. INTRODUCTION common mode mutual inductance. And in Section VII, some RANSFORMERS are important passive components straight-forward adaptations of the transformer core for more T which have various applications such as broadband accurate modeling of actual transformer baluns, followed by impedance matching, power combining and dividing. -

Wireless Interconnect Using Inductive Coupling in 3D-Ics by Sang Wook
Wireless Interconnect using Inductive Coupling in 3D-ICs by Sang Wook Han A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Electrical Engineering) in The University of Michigan 2012 Doctoral Committee: Assistant Professor David D. Wentzloff, Chair Professor David Blaauw Professor Karl Grosh Professor John Patrick Hayes TABLE OF CONTENTS LIST OF FIGURES ...................................................................................................... iv LIST OF TABLES ...................................................................................................... viii LIST OF APPENDICES ............................................................................................... ix Chapter I. Introduction ............................................................................................... 1 I.1 3DIC ................................................................................................................. 4 I.2 Through-Silicon-Vias ....................................................................................... 7 I.3 Capacitive Coupling ......................................................................................... 8 I.4 Inductive Coupling ......................................................................................... 10 I.4.1 ... Inductive Data Link ................................................................................. 12 I.4.2 ... Inductive Power Link ............................................................................. -

Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors
Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors The following pages contain the descriptors of all part categories covered by the 4-Volume RIAC Publication “Electronic Parts Reliability Data”, Catalog No. EPRD-2014. -
Unit V Rectifiers, Block Oscillators and Timebase
RECTIFIERS • A rectifier is an electrical device that converts AC supply into unidirectional DC supply. • This process of converting alternating current (AC) to direct current (DC) is also called as rectification. • These bridge rectifiers are available in different packages as modules ranging from few amperes to several hundred amperes. • Mostly in bridge rectifier circuits, semiconductor diode is used for converting AC since it allows the current flow in one direction only (Unidirectional device) Half Wave Rectifier •It is a simple type of rectifier made with single diode which is connected in series with load. • For small power levels this type of rectifier circuit is commonly used. •During the positive half of the AC input, diode becomes forward biased and currents starts flowing through it. •During the negative half of the AC input, diode becomes reverse biased and current stops flowing through it. •Because of high ripple content in the output, this type of rectifier is seldom used with pure resistive load. • The output DC voltage of a half wave rectifier can be calculated with the following two ideal equations Advantage •Simple circuit and low cost Disadvantage •The output current in the load contains, in addition to dc component, ac components of basic frequency equal to that of the input voltage frequency. •Ripple factor is high and an elaborate filtering is, therefore, required to give steady dc output. •The power output and, therefore, rectification efficiency is quite low. This is due to the fact that power is delivered only half the time. •Transformer Utilization Factor (TUF) is low. •DC saturation of transformer core resulting in magnetizing current and hysteresis losses and generation of harmonics. -

Solid State Tesla Coils Page 1 of 14
Solid State Tesla Coils Page 1 of 14 Solid State Tesla Coils How to Make Them, How They Work! Last updated 7/5/2005 Table of Contents: Preliminary cautions, notes, warnings, etc. Theory - Low Impedance Primary Feed (a good way) Theory - High Impedance Primary Feed (usually not so good) Theory - End Feed Without a Primary (can be good!) Theory - Energy Storage in the Primary (probably so-so at best) Dipole Vs. Monopole Coils (mainly monopoles discussed in this file) Actual Circuits - Low Impedance Primary Feed Actual Circuits - End Feed Design Example (untested) - Energy Storage in the Primary Helpful hints for building solid state Tesla coils! My Tesla coil top page and links to the Tesla coil web ring Preliminary Cautions, Notes, Warnings, etc. 1. The subject matter in this file assumes you already have some electronic project knowledge and skills. You ought to have some skills in building things, as well as electronic knowledge to the point of knowing simple AC circuit analysis, series and parallel resonant circuits, some amplifier and oscillator theory, and a bit of radio stuff. I hope you know what Armstrong, Hartley and Colpitts oscilators are and how they work. If not, you may still be able to build the stuff mentioned below and burn your house down, but knowing how the stuff below works will help if you don't quite get things working. This is not the place to learn the basics of electronics - spend a week or two reading library books if you have to. 2. Things may not work right the first time. -
Passive Devices for Communication Integrated Circuits
Berkeley Passive Devices for Communication Integrated Circuits Prof. Ali M. Niknejad U.C. Berkeley Copyright c 2014 by Ali M. Niknejad Niknejad Advanced IC's for Comm Outline Part I: Motivation Part II: Inductors Part III: Transformers Part IV: E/M Coupling Part V: mm-Wave Passives (if time permits) Niknejad Advanced IC's for Comm Motivation Why am [are] I [you] here? Niknejad Advanced IC's for Comm Passive Devices Equally important as active devices at RF/microwave frequencies Quality factor of resonators determines phase noise (key spec for high data rate communication) Transistor requires matching in order to obtain Maximum gain Low noise High power Lack of \ground plane" in CMOS requires careful design of return paths and AC bypass capacitors Niknejad Advanced IC's for Comm Innovations in IC?s VDD V +V − out out + Vin +Vin Vin +Vin Vin +Vin Vin +Vin VDD Vout VDD − − − − − VDD Some of the best ideas in the past 10 years have come from custom passive devices which were not in the \library" Examples: DAT, tapered resonator, artificial dielectric transmission lines (slow wave and meta-material structures) Ref: [Aoki] Niknejad Advanced IC's for Comm Why should \designers" be involved? They know their circuits best and can make the best decisions. There are many solutions to a give problem with competing trade-offs. Without knowing the trade-offs, it's hard to make a decision in a vacuum. The designer should be aware of the layout of the passive elements to be sure that \what you see is what you get". -

Review of Power Improvement on Wireless Power Transfer
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 14, Issue 6 Ser. I (Nov. – Dec. 2019), PP 38-41 www.iosrjournals.org Review of Power Improvement on Wireless Power Transfer A.H. Butar-Butar1,2, J. H. Leong2, M. Irwanto2,3 1Department of Electrical Engineering, Medan State University, Medan, Indonesia 2Fellow of Center of Renewable Energy, School of Electrical System Engineering, Universiti Malaysia Perlis (UniMAP), Perlis, Malaysia 3Departement of Electrical Engineering, Institut Teknologi Medan (ITM), Medan, Indonesia Abstract: The wireless power transfer (WPT) is a concept to transfer power from the transmitter side to the receiver side using an electromagnetic principle. The transmitted power is low because it does not use wire. Four concepts can be applied to improve the power on the receiver side of WPT system. They are the first is a WPT using relay coil, the second concept is the WPT using single input multi output (SIMO), the third concept is the WPT using multi input single output (MISO) and the last is the WPT using multi input multi output (MIMO). This paper reviews the four concept for improving power of WPT system. Keywords – power improvement, wireless power transfer, relay resonant, SISO, SIMO, MISO, MIMO ----------------------------------------------------------------------------------------------------------------------------- ---------- Date of Submission: 16-11-2019 Date of Acceptance: 02-12-2019 ----------------------------------------------------------------------------------------------------------------------------- ---------- I. Introduction The wireless power transfer (WPT) transfers AC electrical energy from the transmitter coil to the receiver coil. If the AC voltage source is as main energy source of the WPT and it has fix frequency, thus the LC tank (suitable of connection and values of capacitor and inductor of transmitter and receiver coil) should has same frequency of the AC voltage source. -
Designing Wide-Band Transformers for HF and VHF Power Amplifiers
Designing Wide-band Transformers for HF and VHF Power Amplifiers The author describes the alternatives available in the design of transformers for solid state RF amplifiers. The key parameters of different construction techniques are discussed with results shown for each. By Chris Trask, N7ZWY Introduction given when making choices of the and the manner in which they are con- In the design of RF power amplifiers, magnetic materials (if any is to be used), structed. The transmission losses and wide-band transformers play an the conductors, and the method of the low frequency cutoff are primarily important role in the quality of the construction, as the choices made weigh dependent upon the method of con- amplifier as they are fundamental in significantly in the overall performance struction, the choices of magnetic ma- determining the input and output of the transformer. The type and length terial and the number of turns on the impedances, gain flatness, linearity, of the conductors and the permeability windings or length of the conductors. power efficiency and other performance of the magnetic material are the These choices further determine the characteristics. The three forms of primary factors that determine the parasitic reactances that affect the transformers that are encountered, coupling, which in turn determines the high frequency performance, which unbalanced-to-unbalanced (unun), transmission loss and the low frequency include, but are not limited to, resis- balanced-to-balanced (balbal), and cutoff. The type and length of conductor tive losses, leakage inductance, balanced-to-unbalanced (balun), are used and the loss characteristics of the interwinding capacitance and winding used in various combinations to magnetic material also affects the self capacitance. -

Load Tap Changers
April, 2014 Load Tap Changers Voltage fluctuations on transmission grids often require transformers to have either short term or long term regulation capability. The easiest way to do this is to add or subtract turns to the transformer windings. Tap changer switches provide an external means to accomplish this voltage adjustment. Most transformers include a manually operated tap changer switch on the high voltage winding. Manual tap changer adjustments can only be made however, while the transformer is deenergized. On power distribution networks, a large step-down transformer may include an off-load tap changer and an on-load automatic tap changer (LTC). The off load tap changer is set to match the long term system profile on the high voltage network and is rarely changed. The LTC tap changer however, may change positions several times a day, to accommodate varying load conditions, without interrupting the power supply. The high voltage deenergized tap changer is normally mounted in the main tank of the liquid filled transformer while depending on size, LTCs can be internal to the main tank or contained within a separate, sealed liquid filled compartment with feed though tap connections located on the rear panel (below). The “external” LTC is welded around a cutout on the front of the transformer tank after which the tap connections are made to a regulator winding that is connected in series with the transformer winding. Pacific Crest Transformers 300 West Antelope Road – Medford, Oregon 97503 Tel : (541) 826 – 2113 Fax : (541) 826 - 8847 The photo to the right is of a transformer in production, with the liquid filled LTC welded to the front of the transformer’s main tank. -

IEEE/PES Transformers Committee
Transformers Committee Fall 2013 Meeting – St. Louis, MO October 19-24, 2013 Renaissance St. Louis Grand Hotel Chair: Bill Chiu Vice Chair: Donald Platts Secretary: Stephen Antosz Treasurer: Gregory Anderson Standards Coordinator: William Bartley Past Chair: J. Edward Smith IEEE/PES Transformers Committee Fall 2013 Meeting Minutes St. Louis, MO October 19-24, 2013 Unapproved (These minutes are on the agenda to be approved at the next meeting in Spring 2014) TABLE OF CONTENTS 1.0 ATTENDANCE 2.0 APPROVAL OF PREVIOUS MINUTES – STEPHEN ANTOSZ 3.0 CHAIR’S REMARKS & REPORT – BILL CHIU 3.1 CHAIR’S REMARKS 3.2 CHAIR’S REPORT 4.0 VICE CHAIR’S REPORT – DONALD PLATTS 5.0 SECRETARY’S REPORT – STEPHEN ANTOSZ 6.0 TREASURER’S REPORT – GREGORY ANDERSON 7.0 AWARDS REPORT – JAMES EDWARD SMITH 8.0 ADMINISTRATIVE SC MINUTES – BILL CHIU 9.0 STANDARDS SC MINUTES & REPORT – WILLIAM BARTLEY 9.1 STANDARDS SUBCOMMITTEE MINUTES 9.2 STANDARDS REPORT 10.0 MEETINGS PLANNING SC MINUTES & REPORT – GREGORY ANDERSON 10.1 MEETINGS SUBCOMMITTEE MINUTES 10.2 MEETINGS REPORT 11.0 MINUTES OF TECHNICAL SUBCOMMITTEES 11.1 PERFORMANCE CHARACTERISTICS SC – ED TENYENHUIS 11.2 POWER TRANSFORMERS SC – JOE WATSON 11.3 UNDERGROUND TRANS & NETWORK PROTECTORS – CARL NIEMAN 11.4 BUSHINGS SC – PETER ZHAO 11.5 DRY TYPE TRANSFORMERS SC – CHARLES JOHNSON 11.6 DISTRIBUTION TRANSFORMERS SC – STEVE SHULL 11.7 DIELECTRIC TESTS SC – MICHAEL FRANCHEK 11.8 HVDC CONVERTER TRANSFORMERS & REACTORS – MIKE SHARP 11.9 INSTRUMENT TRANSFORMERS SC – ROSS MCTAGGART 11.10 INSULATING FLUIDS SC – SUSAN MCNELLY 11.11 INSULATION LIFE SC – BRUCE FORSYTH 12.0 EDITOR’S REPORT – SANJIB SOM 13.0 LIAISON REPORTS 13.1 STANDARDS COORDINATING COMMITTEE NO.