Faculty of Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
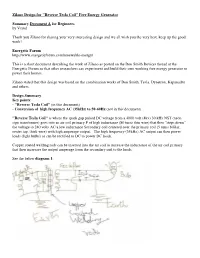
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -

Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers
energies Article Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers Yuan-Chih Lin, Ding-Tang Chen and Ching-Jan Chen * Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan; No. 1, Sec. 4, Roosevelt Rd., Taipei 10617, Taiwan * Correspondence: [email protected]; Tel.: +886-2-3366-3366 (ext. 348) Received: 9 July 2019; Accepted: 19 August 2019; Published: 21 August 2019 Abstract: LLC resonant converters with center-tapped transformers are widely used. However, these converters suffer from a flux walking issue, which causes a larger output ripple and possible transformer saturation. In this paper, a flux-balance control strategy is proposed for resolving the flux walking issue. First, the DC magnetizing current generated due to the mismatched secondary-side leakage inductances, and its effects on the voltage gain are analyzed. From the analysis, the flux-balance control strategy, which is based on the original output-voltage control loop, is proposed. Since the DC magnetizing current is not easily measured, a current sensing strategy with a current estimator is proposed, which only requires one current sensor and is easy to estimate the DC magnetizing current. Finally, a simulation scheme and a hardware prototype with rated output power 200 W, input voltage 380 V, and output voltage 20 V is constructed for verification. The simulation and experimental results show that the proposed control strategy effectively reduces the DC magnetizing current and output voltage ripple at mismatched condition. Keywords: LLC resonant converter; center-tapped transformer; flux walking; flux-balance control loop; magnetizing current estimation 1. Introduction The LLC resonant converter is widely used in many different applications such as onboard chargers, server power systems, laptops, desktops, photovoltaic regeneration systems. -
How Understanding a Railway's Historic Evolution Can Guide Future
College of Engineering, School of Civil Engineering University of Birmingham Managing Technical and Operational Change: How understanding a railway’s historic evolution can guide future development: A London Underground case study. by Piers Connor Submitted as his PhD Thesis DATE: 15th February 2017 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. Managing Technical & Operational Development PhD Thesis Abstract The argument for this thesis is that patterns of past engineering and operational development can be used to support the creation of a good, robust strategy for future development and that, in order to achieve this, a corporate understanding of the history of the engineering, operational and organisational changes in the business is essential for any evolving railway undertaking. It has been the objective of the author of this study to determine whether it is essential that the history and development of a railway undertaking be known and understood by its management and staff in order for the railway to function in an efficient manner and for it to be able to develop robust and appropriate improvement strategies in a cost-effective manner. -

Published Articles Balun Modeling for Differential Amplifiers
Proceedings of the World Congress on Engineering and Computer Science 2019 WCECS 2019, October 22-24, 2019, San Francisco, USA Balun Modeling for Differential Amplifiers Kun Chen, Zheng Liu, Xuelin Hong, Ruinan Chang, and Weimin Sun Abstract—This work proposes an improved lumped element model. Particular for this core is an additional element which model for accurately characterizing transformer based baluns. will be shown later to play a critical role in modeling The model can accurately describe balun behaviors for both common mode behavior. Section III will derive the formulae differential and common modes. Lumped elements extraction from Y parameter is presented, and the relationship between for extracting the model elements from the Y parameter. In the proposed model and the classic compact transformer model Section IV, the differential, common and divider modes will is derived. Numerical results will be presented to validate the be analyzed separately, where we will justify the addition of accuracy of the proposed model. the extra element in the transformer core. Section V will Index Terms—balun modeling, transformer modeling, push- discuss the relationship of the proposed transformer core pull amplifiers, power amplifier (PA), compact model, differen- model with the popular compact model that is based on ideal tial mode, common mode, mutual inductance. transformers and leakage and magnitization inductances. Section VI will discuss the physics and modeling of the I. INTRODUCTION common mode mutual inductance. And in Section VII, some RANSFORMERS are important passive components straight-forward adaptations of the transformer core for more T which have various applications such as broadband accurate modeling of actual transformer baluns, followed by impedance matching, power combining and dividing. -

POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-Μc LSPT)
POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-µC LSPT) SALIENT FEATURES u Aesthetically designed injection molded electronic desk. u Master unit carrying useful experiment resources like line Synchronized firing circuits, Power supplies, lamp load, RLC loads, Battery charging supply etc. while the central slot will hold replaceable experiment panels. u Each multi experiment panel is secured in an ABS molded plastic sturdy enclosure, and has colorful screw less overlay showing circuit & Connection through Sturdy 4mm Banana Sockets & Patch Chords. u Set of User Guide provided with each unit. u Order 6 Master units and set of 6 panels (PE 1 x 2 , PE2, PE3, PE6X2nos)+ Power scope, buy more of PE1 and PE6 being major panels. Master Unit Accessories: Built in power supply l 15 pin D connector cable assembly, u DC supply : + 12V, 500mA, l 4mm patchcords : 100mm X 10 Nos & 500mm X 20 Nos. u Unregulated Power supply 17V / 750mA, Optional Power Scope u Regulated 7VDC to 14VDC/3A O/P is provided as 12V Battery charging supply. In absence of battery, same may be used as simulated battery source to run experiments on inverters etc. u Isolated DC supply +12V/ 300mA with isolated common. u On board Inverter transformer of Primary & Secondaries: 12-11-0- 11-12/3A. u On board o/p to Isolated Drive Circuit AC supply u 230V AC line voltage is made available on two banana 4mm Accessory for any Lab CRO for off ground differential measurements sockets as well as 1.5A fuse extender for variac if used. -

Universal Motor - Construction, Working and Characteristics
Universal Motor - construction, working and characteristics. A universal motor is a special type of motor which is designed to run on either DC or single phase AC supply. These motors are generally series wound (armature and field winding are in series), and hence produce high starting torque (See characteristics of DC motors here). That is why, universal motors generally comes built into the device they are meant to drive. Most of the universal motors are designed to operate at higher speeds, exceeding 3500 RPM. They run at lower speed on AC supply than they run on DC supply of same voltage, due to the reactance voltage drop which is present in AC and not in DC. There are two basic types of universal motor : (i)compensated type and (ii) uncompensated type. Construction of Universal motor Construction of a universal motor is very similar to the construction of a DC machine. It consists of a stator on which field poles are mounted. Field coils are wound on the field poles. However, the whole magnetic path (stator field circuit and also armature) is laminated. Lamination is necessary to minimize the eddy currents which induce while operating on AC. The rotary armature is of wound type having straight or skewed slots and commutator with brushes resting on it. The commutation on AC is poorer than that for DC. because of the current induced in the armature coils. For that reason brushes used are having high resistance. Working of universal motor A universal motor works on either DC or single phase AC supply. When the universal motor is fed with a DC supply, it works as a DC series motor. -

UNIVERSAL MOTORS Universal Motor
UNIVERSAL MOTORS Universal motor The motors which can be used with a single phase AC source as well as a DC source of supply and voltages are called as Universal Motor. It is also known as Single Phase Series Motor. A universal motor is a commutation type motor. Construction of the universal motor The construction of the universal motor is same as that of the series motor. I n o rd e r t o m i n i m i z e t h e p ro b l e m o f commutation, high resistance brushes with increased brush area are used. To reduce Eddy current losses the stator core and yoke are laminated. The Universal motor is simple and less costly. It is used usually for rating not greater than 7 5 0 W . Characteristic of Universal motor The characteristic of Universal motor is similar to that of the DC series motor. When operating from an AC supply, the series motor develops less torque. By interchanging connections of the fields with respect to the armature, the direction of rotation can be altered. Universal motor T h e d i r e c t i o n o f t h e developed torque will re m a i n p o s i t i v e , a n d direction of the rotation will be as it was before. The nature of the torque will be pulsating, and the frequency will be twice that of line frequency as shown in the waveform. Universal motor Thus, a Universal motor can work on both AC and DC. -

Design and Simulation of Leakage Current in Smart Power Module (Spm) Motor Drive Application
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by UTHM Institutional Repository DESIGN AND SIMULATION OF LEAKAGE CURRENT IN SMART POWER MODULE (SPM) MOTOR DRIVE APPLICATION SYAHFITRI BIN SAIDIN A project report submitted in partial fulfillment of the requirement for the award of the Degree of Master of Electrical Engineering Faculty Of Electrical And Electronics Engineering Universiti Tun Hussein Onn Malaysia DECEMBER 2013 vi CONTENTS TITLE i DECLARATION ii DEDICATION iii ACKNOWLEDGEMENT iv ABSTRACT v CONTENTS vi LIST OF FIGURES x LIST OF TABLES xiv LIST OF SYMBOL AND ABBREAVIATION xv LIST OF APPENDIXES xvi CHAPTER 1 INTRODUCTION 1.1 General Background of Electric Motor 1 1.2 Universal Motor 3 1.2.1 Properties of Universal Motor 4 1.2.2 Applications of Universal Motor 6 1.3 DC Motor 7 1.3.1 Brush DC Motor 8 1.3.2 Brushless DC Motor 9 1.3.3 Permanent Magnet Stators 9 1.4 Smart Power Module (SPM) 10 1.5 Problem Statement 12 vii 1.6 Objectives and Scopes 1.6.1 Objective 13 1.6.2 Scope of Work 14 1.6.3 Thesis Overview 14 CHAPTER 2 LITERATURE REVIEW 2.1 Introduction 16 2.2 What Is Leakage Current? 16 2.2.1 Why Is It Important? 17 2.2.2 What Causes Leakage Current? 17 2.2.3 What Is A Safe Level 18 2.3 Direct Current Motor (Dc Motor) 19 2.3.1 Principle Of Dc Motor 19 2.3.2 Detailed Description Of A Dc Motor 21 2.3.3 Working Or Operating Principle Of Dc Motor 23 2.3.4 Construction Of Dc Motor 28 2.3.5 Permanent Magnet Stators 29 2.3.6 Electrical Connections Between The Stator And Rotor 30 2.4 Electricity Consumption By Electrical Motor Systems 31 2.5 Motor Efficiency 33 2.6 Brushless DC Motors (BLDC) 35 2.6.1 Brushless Vs. -

Wireless Interconnect Using Inductive Coupling in 3D-Ics by Sang Wook
Wireless Interconnect using Inductive Coupling in 3D-ICs by Sang Wook Han A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Electrical Engineering) in The University of Michigan 2012 Doctoral Committee: Assistant Professor David D. Wentzloff, Chair Professor David Blaauw Professor Karl Grosh Professor John Patrick Hayes TABLE OF CONTENTS LIST OF FIGURES ...................................................................................................... iv LIST OF TABLES ...................................................................................................... viii LIST OF APPENDICES ............................................................................................... ix Chapter I. Introduction ............................................................................................... 1 I.1 3DIC ................................................................................................................. 4 I.2 Through-Silicon-Vias ....................................................................................... 7 I.3 Capacitive Coupling ......................................................................................... 8 I.4 Inductive Coupling ......................................................................................... 10 I.4.1 ... Inductive Data Link ................................................................................. 12 I.4.2 ... Inductive Power Link ............................................................................. -

Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors
Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors The following pages contain the descriptors of all part categories covered by the 4-Volume RIAC Publication “Electronic Parts Reliability Data”, Catalog No. EPRD-2014. -
Unit V Rectifiers, Block Oscillators and Timebase
RECTIFIERS • A rectifier is an electrical device that converts AC supply into unidirectional DC supply. • This process of converting alternating current (AC) to direct current (DC) is also called as rectification. • These bridge rectifiers are available in different packages as modules ranging from few amperes to several hundred amperes. • Mostly in bridge rectifier circuits, semiconductor diode is used for converting AC since it allows the current flow in one direction only (Unidirectional device) Half Wave Rectifier •It is a simple type of rectifier made with single diode which is connected in series with load. • For small power levels this type of rectifier circuit is commonly used. •During the positive half of the AC input, diode becomes forward biased and currents starts flowing through it. •During the negative half of the AC input, diode becomes reverse biased and current stops flowing through it. •Because of high ripple content in the output, this type of rectifier is seldom used with pure resistive load. • The output DC voltage of a half wave rectifier can be calculated with the following two ideal equations Advantage •Simple circuit and low cost Disadvantage •The output current in the load contains, in addition to dc component, ac components of basic frequency equal to that of the input voltage frequency. •Ripple factor is high and an elaborate filtering is, therefore, required to give steady dc output. •The power output and, therefore, rectification efficiency is quite low. This is due to the fact that power is delivered only half the time. •Transformer Utilization Factor (TUF) is low. •DC saturation of transformer core resulting in magnetizing current and hysteresis losses and generation of harmonics. -

Brush DC Motor Runs Along Dan Jones, Incremotion Associates
TECHNICAL Brush DC Motor Runs Along Dan Jones, Incremotion Associates Everything started in 1800 when Volta developed the first DC battery. Fara- day used the DC battery to develop the first electric motor. It used brushes to transfer the battery voltage and cur- rent to the rotating disk rotor. This was in mid-1831. Thus was born the brush DC motor. Construction The slotted brush DC motor of today comes in two basic configurations: the wound field DC motor and the perma- nent magnet DC motor. The key parts of a DC motor include the armature (the rotating part), the field (either a cop- per winding or permanent magnet), and a mechanical commutation sys- tem consisting of a slotted commutator, mechanical brushes with copper wires connecting to outside terminals. The commutator is connected to various windings in a sequential pattern. The two brushes ride on the commutator to connect to the battery or outside power source via the terminals as shown in Figure 1. These brush DC motor types are called slotted or iron core types. Motor Operation The DC motor is the simplest motor type. Raise the input voltage and the motor speeds up. Lower the voltage and it reduces speed. Increase the mo- tor’s shaft load and shaft torque and armature current go up while the speed goes down. The permanent magnet DC motor is the most popular type, replac- ing the three wound field DC motors in many applications. Today the most Figure 1 Permanent magnet DC motor structure. popular wound field DC motor has an- other name—the universal motor—a separate motor type because it can be driven by AC and DC input power.