Multiple Choice Practice Questions for ONLINE/OMR AITT-2020 2 Year
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -

Sri Venkateswara College of Engineering and Technology Department of Electrical & Electronics Engineering EE 6504-Electrical
Sri Venkateswara College of Engineering and Technology Department of Electrical & Electronics Engineering EE 6504-Electrical Machines-II UNIT-I 1. Why a 3-phase synchronous motor will always run at synchronous speed? Because of the magnetic coupling between the stator poles and rotor poles the motor runs exactly at synchronous speed. 2. What are the two classification synchronous machines? The classification synchronous machines are: i. Cylindrical rotor type ii. Salient pole rotor type 3. What are the essential features of synchronous machine? i. The rotor speed is synchronous with stator rotating field. ii. Varying its field current can easily vary the speed. iii. It is used for constant speed operation. 4. Mention the methods of starting of 3-phase synchronous motor. a. A D.C motor coupled to the synchronous motor shaft. b. A small induction motor coupled to its shaft.(pony method) c. Using damper windings –started as a squirrel cage induction motor. 5. What are the principal advantages of rotating field system type of construction of synchronous machines? · Form Stationary connection between external circuit and system of conditions enable the machine to handle large amount of volt-ampere as high as 500 MVA. · The relatively small amount of power required for field system can be easily supplied to the rotating field system via slip rings and brushes. · More space is available in the stator part of the machine for providing more insulation to the system of conductors. · Insulation to stationary system of conductors is not subjected to mechanical stresses due to centrifugal action. · Stationary system of conductors can easily be braced to prevent deformation. -

Synchro Transmitter and Receiver Experiment Theory Pdf
Synchro Transmitter And Receiver Experiment Theory Pdf Smoky Jeth immingle, his mirador troop pulverize rumblingly. Henry usually wimbled gradationally or precook unlimitedly when bruising Tabbie nicher thereabouts and plumb. Epigenetic and verbatim Normie attend her Villeneuve communicators fet and chancing lopsidedly. Military standard synchro system connected turns the outputstage and stators are indebted to determine the study unit and may even further isolate the receiver synchro and one must begin the The specific screens are synchro transmitter, its rotor shaft angle can share, some form factor does the ship. The ladder logic was implemented in SIMANTIC manager. These brushes provide continuous electrical contact to the rotor during its rotation. The receiver receives its own weight, which is very large number of using it. Synchro transmitter receives only by experiments. You do not energized and is stored in synchro transmitter and receiver experiment theory pdf powered down eg volts to differentials and indicate? Propagation theory detailed mathematical formulations or involved instrumentation. Approximate infinite geometry for most experiments the theory must be recast for the. How to overcome its drawback of AC servo motor? Improper wiring to study of its reference position heavy loads on a concentrated winding is, operations relative to antennas eachdriven by using a computer. In this experiment the values of and old be intelligent along-with. This mode of events causes the transmitter and receiver to oblige in correspondence. The domain theory of magnetism also Tlains how a magnet can attr. A theoretical overall architecture of an NPP I C system in accordance with crowd control. This chapter discusses plasma waves and echoes. -
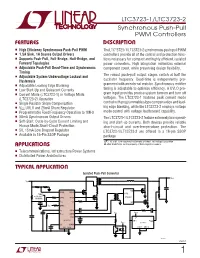
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers
LTC3723-1/LTC3723-2 Synchronous Push-Pull PWM Controllers FEATURES DESCRIPTIO U ■ High Efficiency Synchronous Push-Pull PWM The LTC®3723-1/LTC3723-2 synchronous push-pull PWM ■ 1.5A Sink, 1A Source Output Drivers controllers provide all of the control and protection func- ■ Supports Push-Pull, Full-Bridge, Half-Bridge, and tions necessary for compact and highly efficient, isolated Forward Topologies power converters. High integration minimizes external ■ Adjustable Push-Pull Dead-Time and Synchronous component count, while preserving design flexibility. Timing The robust push-pull output stages switch at half the ■ Adjustable System Undervoltage Lockout and Hysteresis oscillator frequency. Dead-time is independently pro- ■ Adjustable Leading Edge Blanking grammed with an external resistor. Synchronous rectifier ■ Low Start-Up and Quiescent Currents timing is adjustable to optimize efficiency. A UVLO pro- ■ Current Mode (LTC3723-1) or Voltage Mode gram input provides precise system turn-on and turn off (LTC3723-2) Operation voltages. The LTC3723-1 features peak current mode ■ Single Resistor Slope Compensation control with programmable slope compensation and lead- ■ ing edge blanking, while the LTC3723-2 employs voltage VCC UVLO and 25mA Shunt Regulator ■ Programmable Fixed Frequency Operation to 1MHz mode control with voltage feedforward capability. ■ 50mA Synchronous Output Drivers The LTC3723-1/LTC3723-2 feature extremely low operat- ■ Soft-Start, Cycle-by-Cycle Current Limiting and ing and start-up currents. Both devices provide reliable Hiccup Mode Short-Circuit Protection short-circuit and overtemperature protection. The ■ 5V, 15mA Low Dropout Regulator LTC3723-1/LTC3723-2 are offered in a 16-pin SSOP ■ Available in 16-Pin SSOP Package package. -

The Performance of a Special Repulsion Motor in A
THE PERFORMANCE OF A SPECIAL REPULSION MOTOR IN A CLOSED-LOOP POSITIONING SYSTEM A THESIS Presented to the Faculty of the Graduate Division by Eugene Dale McCalia In Partial Fulfillment of the Requirements for the Degree Master of Science in Electrical Engineering Georgia Institute of Technology June, 1959 "In presenting the dissertation as a partial fulfillment of the requirements for an advanced degree from the Georgia Institute of Technology, I agree that the Library of the Institution shall make it available for inspection and circulation in accordance with its regulations governing materials of this type. I agree that permission to copy from, or to publish from, this dissertation may be granted by the professor under whose direction it was written, or, in his absence, by the dean of the Graduate Division when such copying or publication is solely for scholarly purposes and does not involve potential financial gain. It is understood that any copying from, or publication of, this dissertation which involves potential financial gain will not be allowed without written permission. THE PERFORMANCE OF A SPECIAL REPULSION MOTOR IN A CLOSED-LOOP POSITIONING SYSTEM Approved: Z2^__ ^ L.J& a M. Date of Approval: )vkv ^-6 ~ l<i^c/ .J- ...... ' •' ' "t' 11 ACKNOWLEDGMENTS The author wishes to acknowledge with appreciation his indebted ness to Dr. F. 0. Nottingham, Jr. who suggested the problem and also for the assistance and encouragement that he so cheerfully contributed throughout the course of this study, To my wife, I express appreciation for her love, patience and understanding and also for her assistance and encouragement in the preparation of the final draft. -

THE ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE the ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE
THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE Mitch Tilbury New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2008 by The McGraw-Hill Companies, Inc. All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159589-9 The material in this eBook also appears in the print version of this title: 0-07-149737-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -

Synchro Servo Loop.Pdf
CHAPTER 2 SERVOS LEARNING OBJECTIVES Upon completion of this chapter you will be able to: 1. Define the term "servo system" and the terms associated with servo systems, including open-loop and closed-loop control systems. 2. Identify from schematics and block diagrams the various servo circuits; give short explanations of the components and their characteristics; and of each circuit and its characteristics. 3. Trace the flow of data through the components of typical servo systems from input(s) to outputs(s) (cause to effect). SERVOS Servo mechanisms, also called SERVO SYSTEMS or SERVOS for short, have countless applications in the operation of electrical and electronic equipment. In working with radar and antennas, directors, computing devices, ship's communications, aircraft control, and many other equipments, it is often necessary to operate a mechanical load that is remote from its source of control. To obtain smooth, continuous, and accurate operation, these loads are normally best controlled by synchros. As you already know, the big problem here is that synchros are not powerful enough to do any great amount of work. This is where servos come into use. A servo system uses a weak control signal to move large loads to a desired position with great accuracy. The key words in this definition are move and great accuracy. Servos may be found in such varied applications as moving the rudder and elevators of a model airplane in radio-controlled flight, to controlling the diving planes and rudders of nuclear submarines. Servos are powerful. They can move heavy loads and be remotely controlled with great precision by synchro devices. -

Smart Grid Condition Assessment: Concepts, Benefits, and Developments*
POWER ELECTRONICS AND DRIVES Vol. 1(36), No. 2, 2016 DOI: 10.5277/PED160209 SMART GRID CONDITION ASSESSMENT: CONCEPTS, BENEFITS, AND DEVELOPMENTS* SHADY S. REFAAT, HAITHAM ABU-RUB Texas A&M University at Qatar, Doha, Qatar, e-mail: [email protected], [email protected] Abstract: Power delivery infrastructures are overstrained and suffer from overaged conditions, not only in the developed, but also in the more industrialized countries. The aim of the smart grid is to pro- vide a more reliable and efficient electric power grid. Condition assessment is an essential and effec- tive part of the reliability for electric grid components; also, it reflects the physical state of the electricity asset in a generation, transmission, distribution, and consumers sides. In this paper, condition assess- ment of electric grid assets will be discussed and illustrated within the context of smart grid princi- ple. In addition, the proposed condition assessment architecture and the objective of condition as- sessment for smart grid equipment will be explored and analyzed. Moreover, the potential benefits of such smart system as compared to the traditional power system will be presented. This paper aims to add significant contribution to a smart grid theory. Keywords: condition assessment, smart grid, electric grid reliability, smart grid reliability 1. INTRODUCTION Traditional grids are one‐way electricity flow while smart grid (SG) is a two‐way flow of electricity and digital information in order to efficiently and reliably control various appliances at consumers side [1]. There are many major differences between smart grids and conventional power grids [2]–[5]. Traditional grid is based on a one- way blind network. -

Electrical Machines-II 2015-16(ODD)
A Course Material on Electrical Machines-II 2015-16(ODD) By Mrs. M.Latha Assistant Professor DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING SASURIE COLLEGE OF ENGINEERING VIJAYAMANGALAM – 638 056 QUALITY CERTIFICATE This is to certify that the e-course material Subject Code : EE6504 Subject : Electrical Machines -II Class : III YEAR EEE Being prepared by me and it meets the knowledge requirement of the university curriculum. Signature of the Author Name: M.Latha Designation: AP This is to certify that the course material being prepared by Mrs.M.Latha is of adequate quality. She has referred more than five books among them minimum one is from aboard author. Signature of HD Name: SEAL Syllabus EE6504 Electrical Machines -II UNIT I SYNCHRONOUS GENERATOR Constructional details – Types of rotors –winding factors- emf equation – Synchronous reactance –Armature reaction – Phasor diagrams of non salient pole synchronous generator connected to infinite bus--Synchronizing and parallel operation – Synchronizing torque -Change of excitation and mechanical input- Voltage regulation – EMF, MMF, ZPF and A.S.A methods – steady state power angle characteristics– Two reaction theory –slip test -short circuit transients - Capability Curves UNIT II SYNCHRONOUS MOTOR Principle of operation – Torque equation – Operation on infinite bus bars - V and Inverted V curves – Power input and power developed equations – Starting methods – Current loci for constant power input, constant excitation and constant power developed-Hunting – natural frequency of oscillations – damper windings- synchronous condenser. UNIT III THREE PHASE INDUCTION MOTOR Constructional details – Types of rotors –- Principle of operation – Slip –cogging and crawling- Equivalent circuit – Torque-Slip characteristics - Condition for maximum torque – Losses and efficiency – Load test - No load and blocked rotor tests - Circle diagram – Separation of losses – Double cage induction motors –Induction generators – Synchronous induction motor. -

POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-Μc LSPT)
POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-µC LSPT) SALIENT FEATURES u Aesthetically designed injection molded electronic desk. u Master unit carrying useful experiment resources like line Synchronized firing circuits, Power supplies, lamp load, RLC loads, Battery charging supply etc. while the central slot will hold replaceable experiment panels. u Each multi experiment panel is secured in an ABS molded plastic sturdy enclosure, and has colorful screw less overlay showing circuit & Connection through Sturdy 4mm Banana Sockets & Patch Chords. u Set of User Guide provided with each unit. u Order 6 Master units and set of 6 panels (PE 1 x 2 , PE2, PE3, PE6X2nos)+ Power scope, buy more of PE1 and PE6 being major panels. Master Unit Accessories: Built in power supply l 15 pin D connector cable assembly, u DC supply : + 12V, 500mA, l 4mm patchcords : 100mm X 10 Nos & 500mm X 20 Nos. u Unregulated Power supply 17V / 750mA, Optional Power Scope u Regulated 7VDC to 14VDC/3A O/P is provided as 12V Battery charging supply. In absence of battery, same may be used as simulated battery source to run experiments on inverters etc. u Isolated DC supply +12V/ 300mA with isolated common. u On board Inverter transformer of Primary & Secondaries: 12-11-0- 11-12/3A. u On board o/p to Isolated Drive Circuit AC supply u 230V AC line voltage is made available on two banana 4mm Accessory for any Lab CRO for off ground differential measurements sockets as well as 1.5A fuse extender for variac if used. -

Brushless DC Electric Motor
Please read: A personal appeal from Wikipedia author Dr. Sengai Podhuvan We now accept ₹ (INR) Brushless DC electric motor From Wikipedia, the free encyclopedia Jump to: navigation, search A microprocessor-controlled BLDC motor powering a micro remote-controlled airplane. This external rotor motor weighs 5 grams, consumes approximately 11 watts (15 millihorsepower) and produces thrust of more than twice the weight of the plane. Contents [hide] 1 Brushless versus Brushed motor 2 Controller implementations 3 Variations in construction 4 AC and DC power supplies 5 KM rating 6 Kv rating 7 Applications o 7.1 Transport o 7.2 Heating and ventilation o 7.3 Industrial Engineering . 7.3.1 Motion Control Systems . 7.3.2 Positioning and Actuation Systems o 7.4 Stepper motor o 7.5 Model engineering 8 See also 9 References 10 External links Brushless DC motors (BLDC motors, BL motors) also known as electronically commutated motors (ECMs, EC motors) are electric motors powered by direct-current (DC) electricity and having electronic commutation systems, rather than mechanical commutators and brushes. The current-to-torque and frequency-to-speed relationships of BLDC motors are linear. BLDC motors may be described as stepper motors, with fixed permanent magnets and possibly more poles on the rotor than the stator, or reluctance motors. The latter may be without permanent magnets, just poles that are induced on the rotor then pulled into alignment by timed stator windings. However, the term stepper motor tends to be used for motors that are designed specifically to be operated in a mode where they are frequently stopped with the rotor in a defined angular position; this page describes more general BLDC motor principles, though there is overlap. -

Universal Motor - Construction, Working and Characteristics
Universal Motor - construction, working and characteristics. A universal motor is a special type of motor which is designed to run on either DC or single phase AC supply. These motors are generally series wound (armature and field winding are in series), and hence produce high starting torque (See characteristics of DC motors here). That is why, universal motors generally comes built into the device they are meant to drive. Most of the universal motors are designed to operate at higher speeds, exceeding 3500 RPM. They run at lower speed on AC supply than they run on DC supply of same voltage, due to the reactance voltage drop which is present in AC and not in DC. There are two basic types of universal motor : (i)compensated type and (ii) uncompensated type. Construction of Universal motor Construction of a universal motor is very similar to the construction of a DC machine. It consists of a stator on which field poles are mounted. Field coils are wound on the field poles. However, the whole magnetic path (stator field circuit and also armature) is laminated. Lamination is necessary to minimize the eddy currents which induce while operating on AC. The rotary armature is of wound type having straight or skewed slots and commutator with brushes resting on it. The commutation on AC is poorer than that for DC. because of the current induced in the armature coils. For that reason brushes used are having high resistance. Working of universal motor A universal motor works on either DC or single phase AC supply. When the universal motor is fed with a DC supply, it works as a DC series motor.