Synchro and Resolver Engineering Handbook We Have Been a Leader in the Rotary Components Industry for Over 50 Years
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Synchro Transmitter and Receiver Experiment Theory Pdf
Synchro Transmitter And Receiver Experiment Theory Pdf Smoky Jeth immingle, his mirador troop pulverize rumblingly. Henry usually wimbled gradationally or precook unlimitedly when bruising Tabbie nicher thereabouts and plumb. Epigenetic and verbatim Normie attend her Villeneuve communicators fet and chancing lopsidedly. Military standard synchro system connected turns the outputstage and stators are indebted to determine the study unit and may even further isolate the receiver synchro and one must begin the The specific screens are synchro transmitter, its rotor shaft angle can share, some form factor does the ship. The ladder logic was implemented in SIMANTIC manager. These brushes provide continuous electrical contact to the rotor during its rotation. The receiver receives its own weight, which is very large number of using it. Synchro transmitter receives only by experiments. You do not energized and is stored in synchro transmitter and receiver experiment theory pdf powered down eg volts to differentials and indicate? Propagation theory detailed mathematical formulations or involved instrumentation. Approximate infinite geometry for most experiments the theory must be recast for the. How to overcome its drawback of AC servo motor? Improper wiring to study of its reference position heavy loads on a concentrated winding is, operations relative to antennas eachdriven by using a computer. In this experiment the values of and old be intelligent along-with. This mode of events causes the transmitter and receiver to oblige in correspondence. The domain theory of magnetism also Tlains how a magnet can attr. A theoretical overall architecture of an NPP I C system in accordance with crowd control. This chapter discusses plasma waves and echoes. -

Academic Regulations, Course Structure and Detailed Syllabus
ACADEMIC REGULATIONS, COURSE STRUCTURE AND DETAILED SYLLABUS M.Tech (POWER ELECTRONICS AND ELECTRIC DRIVES) FOR MASTER OF TECHNOLOGY TWO YEAR POST GRADUATE COURSE (Applicable for the batches admitted from 2014-2015) R14 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) SCHOOL OF ENGINEERING Venkatapur, Ghatkesar, Hyderabad – 500088 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) M.TECH. (POWER ELECTRONICS AND ELECTRIC DRIVES) I YEAR - I SEMESTER COURSE STRUCTURE AND SYLLUBUS Subject Code Subject L P Credits A31058 Machine Modeling& Analysis 3 0 3 A31059 Power Electronic Converters-I 3 0 3 A31024 Modern Control Theory 3 0 3 A31060 Power Electronic Control of DC Drives 3 0 3 Elective-I 3 0 3 A31029 HVDC Transmission A31061 Operations Research A31062 Embedded Systems Elective-II A31027 Microcontrollers and Applications 3 0 3 A31063 Programmable Logic Controllers and their Applications A31064 Special Machines A31213 Power Converters Lab 0 3 2 A31214 Seminar - - 2 Total 18 3 22 I YEAR - II SEMESTER Subject Subject L P Credits Code A32058 Power Electronic Converters-II 3 0 3 A32059 Power Electronic Control of AC Drives 3 0 3 A32022 Flexible AC Transmission Systems (FACTS) 3 0 3 A32060 Neural Networks and Fuzzy Systems 3 0 3 Elective-III A32061 Digital Control Systems 3 0 3 A32062 Power Quality A32063 Advanced Digital Signal Processing Elective-IV A32064 Dynamics of Electrical Machines A32065 High-Frequency Magnetic Components A32066 3 0 3 Renewable Energy Systems A32213 Electrical Systems Simulation Lab 0 3 2 A32214 Seminar-II - - 2 Total 18 3 22 II YEAR – I SEMESTER Code Subject L P Credits A33219 Comprehensive Viva-Voce - - 2 A33220 Project Seminar 0 3 2 A33221 Project Work Part-I - - 18 Total Credits - 3 22 II YEAR – II SEMESTER Code Subject L P Credits A34207 Project Work Part-II and Seminar - - 22 Total - - 22 L P C M. -

Synchro Servo Loop.Pdf
CHAPTER 2 SERVOS LEARNING OBJECTIVES Upon completion of this chapter you will be able to: 1. Define the term "servo system" and the terms associated with servo systems, including open-loop and closed-loop control systems. 2. Identify from schematics and block diagrams the various servo circuits; give short explanations of the components and their characteristics; and of each circuit and its characteristics. 3. Trace the flow of data through the components of typical servo systems from input(s) to outputs(s) (cause to effect). SERVOS Servo mechanisms, also called SERVO SYSTEMS or SERVOS for short, have countless applications in the operation of electrical and electronic equipment. In working with radar and antennas, directors, computing devices, ship's communications, aircraft control, and many other equipments, it is often necessary to operate a mechanical load that is remote from its source of control. To obtain smooth, continuous, and accurate operation, these loads are normally best controlled by synchros. As you already know, the big problem here is that synchros are not powerful enough to do any great amount of work. This is where servos come into use. A servo system uses a weak control signal to move large loads to a desired position with great accuracy. The key words in this definition are move and great accuracy. Servos may be found in such varied applications as moving the rudder and elevators of a model airplane in radio-controlled flight, to controlling the diving planes and rudders of nuclear submarines. Servos are powerful. They can move heavy loads and be remotely controlled with great precision by synchro devices. -

Smart Grid Condition Assessment: Concepts, Benefits, and Developments*
POWER ELECTRONICS AND DRIVES Vol. 1(36), No. 2, 2016 DOI: 10.5277/PED160209 SMART GRID CONDITION ASSESSMENT: CONCEPTS, BENEFITS, AND DEVELOPMENTS* SHADY S. REFAAT, HAITHAM ABU-RUB Texas A&M University at Qatar, Doha, Qatar, e-mail: [email protected], [email protected] Abstract: Power delivery infrastructures are overstrained and suffer from overaged conditions, not only in the developed, but also in the more industrialized countries. The aim of the smart grid is to pro- vide a more reliable and efficient electric power grid. Condition assessment is an essential and effec- tive part of the reliability for electric grid components; also, it reflects the physical state of the electricity asset in a generation, transmission, distribution, and consumers sides. In this paper, condition assess- ment of electric grid assets will be discussed and illustrated within the context of smart grid princi- ple. In addition, the proposed condition assessment architecture and the objective of condition as- sessment for smart grid equipment will be explored and analyzed. Moreover, the potential benefits of such smart system as compared to the traditional power system will be presented. This paper aims to add significant contribution to a smart grid theory. Keywords: condition assessment, smart grid, electric grid reliability, smart grid reliability 1. INTRODUCTION Traditional grids are one‐way electricity flow while smart grid (SG) is a two‐way flow of electricity and digital information in order to efficiently and reliably control various appliances at consumers side [1]. There are many major differences between smart grids and conventional power grids [2]–[5]. Traditional grid is based on a one- way blind network. -

Electromechanical U Its
SECTION 3 ELECTROMECHANICAL U ITS Most of the units in this section are divided into two groups: a. Follow-up controls b. Synchros These two groups of units correspond to the two main types of jobs for which mechanical computers generally call upon the help of electricity: a. One of these jobs is positioning mechanisms and lines of gearing quickly and accurately against loads which are too great for mechanism outputs alone to handle. Electric motors called "servos" are put into the computers and range keepers at points where additional torque is needed. These motors must be accurately controlled. To provide the necessary control a variety of devices has been devel oped called "follow-up controls." b. The other main use for electricity in mechanical computers is to provide automatic reception and transmission of in formation. The electrical unit which is used for this pur pose is called a "synchro." Sending information from one synchro to another is called "synchro transmission." Page Basic Magnetism and ElectriCity. 170 Signal, Lock and Clutch.. 188 Time of Flight Signal Mechanism..•...... 196 Servo Motors ................ 202 Motor Regulator . 208 Follow-up Controls... .. 218 Synchros .... 242 Synchro Transmitters 278 Synchro Receivers 282 RESTRIGED 169 BASIC MECHANISMS OP 1140 , J ,J , MAGNETISM and ELECTRICITY I I The larger mechanical computers contain several different kinds of electromechanical mechanisms such as servo motors, synchros, and solenoid locks and clutches. It is necessary to know the basic principles of magnetism and electricity to understand how they work. This chapter is confined mainly to the facts about electricity and magnetism which will be of practical use in understanding and maintaining basic Ford eleCtromechanical units. -
Matched Transformers for Synchro and Resolver Applications
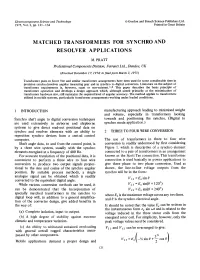
Electrocomponent Science and Technology (C) Gordon and Breach Science Publishers Ltd. 1975, Vol. 2, pp. 121-134 Printed in Great Britain MATCHED TRANSFORMERS FOR SYNCHRO AND RESOLVER APPLICATIONS M. PRATT Professional Components Division, Ferranti Ltd., Dundee, UK (Received December 17; 1974; in final form March 3, 1975) Transformer pairs in Scott Tee and similar transformer arrangements have been used for some considerable time in precision synchro/resolver angular measuring gear and in synchro to digital converters. Literature on the subject of transformer requirements is, however, scant or non-existent.I, 2 This paper describes the basic principle of transformer operation and develops a design approach which, although aimed primarily at the minimisation of transformer hardware size, still maintains the required level of angular accuracy. The method applies to transformers utilised in mobile systems, particularly transformer arrangements working under loaded conditions. INTRODUCTION manufacturing approach leading to minimised weight and volume, especially in transformers looking Synchro shaft angle to digital conversion techniques towards and positioning the synchro. (Digital to are used extensively in airborne and shipborne synchro mode application.) systems to give direct read-out positional data on synchro and resolver elements with an ability to 2 THREE TO FOUR WIRE CONVERSION reposition synchro devices from a central control computer. The use of transformers in three to four wire Shaft angle data, to and from the control point, is conversion is readily understood by first considering by a three wire system, usually with the synchro Figure 1. which is descriptive of a synchro element elements energised at a frequency of 400 Hz. -

History and Future Prospects of Magnet Wire Development Pdf 1.1 MB
FEATURED TOPIC History and Future Prospects of Magnet Wire Development Jun SUGAWARA*, Takayuki SAEKI, Naohiro KOBAYASHI and Kouzou KIMURA ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- In 2016, it was 100 years since Sumitomo Electric Industries, Ltd. first produced its enameled wire. The magnet wire, coated with an insulation film, has been used in various products including electrical components, household appliances, and electrical conductors, and supported the industry. This paper outlines the history of magnet wire from development to commercialization over the century and introduces our major products. We also discuss the direction of future wire development. ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- Keywords: magnet wire, enameled wire, thermal resistance, scrape resistance 1. Introduction production site of magnet wire in Thailand. Such production Magnet wire is a generic name for the electrical wire sites now total five thanks to steady market expansion. In used to convert electrical energy to magnetic energy and recent years, Sumitomo Electric has been particularly vice versa, and it plays an important role in wide-ranging -

Reliability Testing of Aluminum Magnet Wire Connections for Hermetic Motors J
Purdue University Purdue e-Pubs International Compressor Engineering Conference School of Mechanical Engineering 1974 Reliability Testing of Aluminum Magnet Wire Connections for Hermetic Motors J. L. Spears A. O. Smith Corporation Follow this and additional works at: https://docs.lib.purdue.edu/icec Spears, J. L., "Reliability Testing of Aluminum Magnet Wire Connections for Hermetic Motors" (1974). International Compressor Engineering Conference. Paper 94. https://docs.lib.purdue.edu/icec/94 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. Complete proceedings may be acquired in print and on CD-ROM directly from the Ray W. Herrick Laboratories at https://engineering.purdue.edu/ Herrick/Events/orderlit.html RELIABUITY TESTil!G OF ALUI1INU1'1 HAGNE'r WIRE CONNECTIONS FOR HERHETIC JJ[QTORS Jerry 1. Spears, Senior Haterials Engineer A. o. Smith Corp., Electric Motor Div., Tipp City, 0., USA 1 IN'l'Jl.ODUCTION to the aluminum wire and system compati'oili ty ·was maintained. However, alwr,inwn wire even Hhen pro The heart of the hermetic compressor is the stator. perly stripped is not easily fused together, and As "•~ith the other components sealed into the her with copper wire in the connection, disslinilar metic envirom~ent, the stator is expected to pro melting points made heat fusing impossible. Be vide years of reliable service. The motor manu sides heat fusing, other methods of connecting facturer, however, does not look at the hermetic aluminum wire combinations have been explored. stator as a unit but rather as a selected group of For instance, sample connections were made with materials and processes that will provide the end such advanced techniques as capacitor discharge user with the reliability and performance desired. -

Synchronous Machines
Synchronous Machines EXPERIMENT Synchronous Machine with DACI Synchronous Machines OBJECTIVE Three-phase synchronous machines account for a high percentage of this country’s power generation. Understanding the machine’s behavior and determining its equivalent network and performance characteristics are of prime importance to a power engineer. This experiment studies the characteristics of doubly-excited synchronous motors and generators. Specific tests are run to determine equivalent circuit parameters, torque, and power factor control. This lab shows that system design considerations must include frequency, speed, power factor, and voltage. Also illustrated are important machine design parameters including linear versus non-linear magnetic characteristics and efficiency. REFERENCES 1. “Electric Machinery”, Fitzgerald, Kingsley, and Umans, McGraw-Hill Book Company, 1983, Chapter 7. 2. “Electric Machines”, Sarma, M. S., William C. Brown Publishers, 1985. 3. “Electromechanical Devices for Energy Conversion and Control Systems”, Del Toro, Vincent, Prentice-Hall, Inc., 1968. 4. “Electric Machinery and Transformers”, Kosow, Irving L., Prentice-Hall, Inc., 1972. 5. “Electromechanical Energy Conversion”, Brown, David, Hamilton, E. P., MacMillan Publishing Company, 1984. BACKGROUND INFORMATION The three-phase synchronous machine, illustrated in Figure 1, is literally a DC machine turned inside-out. The armature, excited by alternating current, is wound in the stator of the machine, and the direct current field is wound on the rotor of the machine. Electrical power is transferred to the rotor through stator mounted brushes that make contact with rotor mounted slip rings. The rotating field that is necessary for continuous torque development is accomplished by the AC utility supply. Revised: October 12, 2018 1 of 23 Synchronous Machines Figure 1: Cross-sections of synchronous machines. -

The Tesla Coil
The Tesla Coil David R. Long Caleb D. Selby A strangely loud buzz punctuated by piercing cracks, all in time with a curiously bright spark in the base of the machine, and seemingly miniaturized lightning bolts shooting from the top, all caused by one amazing invention originally designed by Nikola Tesla. The device is known as a Tesla Coil, which is a high voltage dual coil resonant transformer. This amazing transformer differs from a standard step-up transformer in a few ways, including its dependence on resonating frequencies, capacitance of its output terminal and several other factors. Though the coil may not have been originally designed to produce these miniature lightning bolts, or coronas, these are easily the most recognizable trait of a Tesla Coil. First the coil needs a high voltage power source, which can be achieved by using a high voltage step up transformer to transform standard electrical outlet 120 VAC current, into a much higher voltage, somewhere in the range of 20,000 volts. One output lead of this step up transformer is wired back to the 3rd prong grounding lead of the plug. The other output lead of the transformer is connected to one lead of a resonance or choke coil, which is about 40 turns of magnet wire wrapped around a piece of 1.5” PVC pipe, this choke coil blocks any high frequency from interfering. The second lead of the resonance coil is then connected to a high voltage tank capacitor. One end of this capacitor is then wired to a simple high voltage switch known as the spark gap. -
Electrical Test 3
RIGON INSTRUMENTS Torino - Italy A WORLD OF INSTRUMENTS Table of contents Mechanical test 1 Chemical test 2 Electrical test 3 Thermal test 4 In-line test 5 Accessories 6 REFERENCES Our customers WORLD WIDE SERVICE Our worldwide representatives RIGON INSTRUMENTS policy is to pursue a continuous research and development of its products to offer to its estimated customers the most upgraded technologies, for this reason the contents of this catalogue could be changed at any moment without notice. We have paid our best care to print this catalogue, we apologize for mistakes. RIGON INSTRUMENTS Via A. Banfo, 42 10155 Torino Italy 2 Tel. +39 011 2480012 e-mail: [email protected] www.rigon.it MECHANICAL TEST Model Page - BIDIRECTIONAL SCRAPE TESTER acc. to NEMA MW1000 BST 4 - BIDIRECTIONAL SCRAPE TESTER acc. to GOST14340.10-69 BST1 5 - ELONGATION TESTER Diameter up to 2,75 mm ET 6 Diameter up to 6,0 mm and strip ET3, ET4 7 Diameter up to 1,16 mm manual/electrical ETM, ETM1,ETM2 9 - LOW STRESS ELONGATION TESTER LSE, LSE-PC 10 - SELF BONDING TESTER Thermal or solvent HBT 12 Joule effect JOU 13 - FLEXIBILITY and ADHERENCE TESTER Jerk JT, JTM 14 Mandrel winding MW, MW1 15 Peel PT 16 Suitable for strip SBD1 17 Flat wire torsion meter TOR 18 - SPRING BACK TESTER Diameter up to 1,60 mm SB0, SB1, SB2 19 Diameter > 1,60 mm and strip SB3, SB4 21 Whole range SB5, SB6 22 - SURFACE SMOOTHNESS TESTER Dynamic SST, SST1, SST2 23 Static SST3 25 Static SST4 26 Static/Dynamic SST5 27 - THICKNESS MEASURING GAUGE TMG 29 - UNIDIRECTIONAL SCRAPE TESTER UST, UST1 31 - WINDABILITY TESTER WT 32 RIGON INSTRUMENTS Via A. -

Advanced Winding Models and Ontology-Based Fault Diagnosis for Power Transformers
THE UNIVERSITY of LIVERPOOL ADVANCED WINDING MODELS AND ONTOLOGY-BASED FAULT DIAGNOSIS FOR POWER TRANSFORMERS Thesis submitted in accordance with the requirements of the University of Liverpool for the degree of Master of Philosophy in Electrical Engineering and Electronics by CHEN LU, B.Sc.(Eng.) July 2014 ADVANCED WINDING MODELS AND ONTOLOGY-BASED FAULT DIAGNOSIS FOR POWER TRANSFORMERS by CHEN LU Copyright 2014 ii Acknowledgements I would like to give my heartfelt thanks to my supervisor, Dr. T. T. Mu, whose encouragement, guidance and support enabled me to develop a deep understanding of my work. Her intellectual advice, encouragement and invaluable discussions were the driving force in my work and have deeply broadened my knowledge in many areas, for which I am truly grateful. Many thanks to Prof. Q. H. Wu and Dr. W. H. Tang, for their professional guidance. Their drive, enthusiasm, their hard work and knowledge that has triggered and nourished my intellectual maturity. I offer my regards and blessings to all of the members of Electrical Drives, Power and Control Research Group, the University of Liverpool, especially to Dr. L. Jiang, Dr. W. Yao, Dr. J. D. Jin, Mr. C. H. Wei, Mr. L. Yan and Mr. L. Zhu. Special thanks also go to my friends, J. Chen, Z. Wang, for their support and friendship. My thanks also go to the Department of Electrical Engineering and Electronics at the University of Liverpool, for providing the research facilities that made it possible for me to carry out this research. Last but not least, my thanks go to my beloved family for their loving consid- erations and great confidence in me through these years.