Wireless Interconnect Using Inductive Coupling in 3D-Ics by Sang Wook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
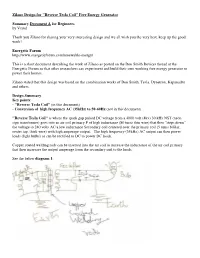
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -

Active Balun with Center-Tapped Inductor and Double-Balanced Gilbert Mixer for GNSS Applications
electronics Article Active Balun with Center-Tapped Inductor and Double-Balanced Gilbert Mixer for GNSS Applications Daniel Pietron 1,* , Tomasz Borejko 1,2 and Witold Adam Pleskacz 1 1 Institute of Microelectronics & Optoelectronics, Warsaw University of Technology, ul. Koszykowa 75, 00-662 Warsaw, Poland; [email protected] or [email protected] (T.B.); [email protected] (W.A.P.) 2 ChipCraft Sp. z o.o., ul. Dobrza´nskiego3, lok. BS073, 20-262 Lublin, Poland * Correspondence: [email protected] Abstract: A new 1.575 GHz active balun with a classic double-balanced Gilbert mixer for global navigation satellite systems is proposed herein. A simple, low-noise amplifier architecture is used with a center-tapped inductor to generate a differential signal equal in amplitude and shifted in phase by 180◦. The main advantage of the proposed circuit is that the phase shift between the outputs is always equal to 180◦, with an accuracy of ±5◦, and the gain difference between the balun outputs does not change by more than 1.5 dB. This phase shift and gain difference between the outputs are also preserved for all process corners, as well as temperature and voltage supply variations. In the balun design, a band calibration system based on a switchable capacitor bank is proposed. The balun and mixer were designed with a 110 nm CMOS process, consuming only a 2.24 mA current from a 1.5 V supply. The measured noise figure and conversion gain of the balun and mixer were, respectively, NF = 7.7 dB and GC = 25.8 dB in the band of interest. -

Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers
energies Article Flux-Balance Control for LLC Resonant Converters with Center-Tapped Transformers Yuan-Chih Lin, Ding-Tang Chen and Ching-Jan Chen * Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan; No. 1, Sec. 4, Roosevelt Rd., Taipei 10617, Taiwan * Correspondence: [email protected]; Tel.: +886-2-3366-3366 (ext. 348) Received: 9 July 2019; Accepted: 19 August 2019; Published: 21 August 2019 Abstract: LLC resonant converters with center-tapped transformers are widely used. However, these converters suffer from a flux walking issue, which causes a larger output ripple and possible transformer saturation. In this paper, a flux-balance control strategy is proposed for resolving the flux walking issue. First, the DC magnetizing current generated due to the mismatched secondary-side leakage inductances, and its effects on the voltage gain are analyzed. From the analysis, the flux-balance control strategy, which is based on the original output-voltage control loop, is proposed. Since the DC magnetizing current is not easily measured, a current sensing strategy with a current estimator is proposed, which only requires one current sensor and is easy to estimate the DC magnetizing current. Finally, a simulation scheme and a hardware prototype with rated output power 200 W, input voltage 380 V, and output voltage 20 V is constructed for verification. The simulation and experimental results show that the proposed control strategy effectively reduces the DC magnetizing current and output voltage ripple at mismatched condition. Keywords: LLC resonant converter; center-tapped transformer; flux walking; flux-balance control loop; magnetizing current estimation 1. Introduction The LLC resonant converter is widely used in many different applications such as onboard chargers, server power systems, laptops, desktops, photovoltaic regeneration systems. -

A Critical Review of Wireless Power Transfer Via Strongly Coupled Magnetic Resonances
Energies 2014, 7, 4316-4341; doi:10.3390/en7074316 OPEN ACCESS energies ISSN 1996-1073 www.mdpi.com/journal/energies Review A Critical Review of Wireless Power Transfer via Strongly Coupled Magnetic Resonances Xuezhe Wei 1,2,*, Zhenshi Wang 1,2 and Haifeng Dai 1,2 1 Clean Energy Automotive Engineering Center, Tongji University, Shanghai 201804, China; E-Mails: [email protected] (Z.W.); [email protected] (H.D.) 2 College of Automotive Studies, Tongji University, Shanghai 201804, China * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +86-21-6958-3764; Fax: +86-21-6958-9121. Received: 21 March 2014; in revised form: 9 May 2014 / Accepted: 30 June 2014 / Published: 7 July 2014 Abstract: Strongly coupled magnetic resonance (SCMR), proposed by researchers at MIT in 2007, attracted the world’s attention by virtue of its mid-range, non-radiative and high-efficiency power transfer. In this paper, current developments and research progress in the SCMR area are presented. Advantages of SCMR are analyzed by comparing it with the other wireless power transfer (WPT) technologies, and different analytic principles of SCMR are elaborated in depth and further compared. The hot research spots, including system architectures, frequency splitting phenomena, impedance matching and optimization designs are classified and elaborated. Finally, current research directions and development trends of SCMR are discussed. Keywords: wireless power transfer; strongly coupled magnetic resonances; mid-range non-radiative high-efficient power transfer 1. Introduction Wireless power transfer is not strange to human beings, since as early as 1889 Nikola Tesla had invented the famous Tesla coils which can transfer power wirelessly. -
Wireless Energy Transfer by Resonant Inductive Coupling
Wireless Energy Transfer by Resonant Inductive Coupling Master of Science Thesis Rikard Vinge Department of Signals and systems CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden 2015 Master’s thesis EX019/2015 Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge Department of Signals and systems Division of Signal processing and biomedical engineering Signal processing research group Chalmers University of Technology Göteborg, Sweden 2015 Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge © Rikard Vinge, 2015. Main supervisor: Thomas Rylander, Department of Signals and systems Additional supervisor: Johan Winges, Department of Signals and systems Examiner: Thomas Rylander, Department of Signals and systems Master’s Thesis EX019/2015 Department of Signals and systems Division of Signal processing and biomedical engineering Signal processing research group Chalmers University of Technology SE-412 96 Göteborg Telephone +46 (0)31 772 1000 Cover: Magnetic field lines between the primary and secondary coil in a wireless energy transfer system simulated in COMSOL. Typeset in LATEX Göteborg, Sweden 2015 iv Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge Department of Signals and systems Chalmers University of Technology Abstract This thesis investigates wireless energy transfer systems based on resonant inductive coupling with applications such as charging electric vehicles. Wireless energy trans- fer can be used to power or charge stationary and moving objects and vehicles, and the interest in energy transfer over the air has grown considerably in recent years. We study wireless energy transfer systems consisting of two resonant circuits that are magnetically coupled via coils. Further, we explore the use of magnetic materials and shielding metal plates to improve the performance of the energy transfer. -

Published Articles Balun Modeling for Differential Amplifiers
Proceedings of the World Congress on Engineering and Computer Science 2019 WCECS 2019, October 22-24, 2019, San Francisco, USA Balun Modeling for Differential Amplifiers Kun Chen, Zheng Liu, Xuelin Hong, Ruinan Chang, and Weimin Sun Abstract—This work proposes an improved lumped element model. Particular for this core is an additional element which model for accurately characterizing transformer based baluns. will be shown later to play a critical role in modeling The model can accurately describe balun behaviors for both common mode behavior. Section III will derive the formulae differential and common modes. Lumped elements extraction from Y parameter is presented, and the relationship between for extracting the model elements from the Y parameter. In the proposed model and the classic compact transformer model Section IV, the differential, common and divider modes will is derived. Numerical results will be presented to validate the be analyzed separately, where we will justify the addition of accuracy of the proposed model. the extra element in the transformer core. Section V will Index Terms—balun modeling, transformer modeling, push- discuss the relationship of the proposed transformer core pull amplifiers, power amplifier (PA), compact model, differen- model with the popular compact model that is based on ideal tial mode, common mode, mutual inductance. transformers and leakage and magnitization inductances. Section VI will discuss the physics and modeling of the I. INTRODUCTION common mode mutual inductance. And in Section VII, some RANSFORMERS are important passive components straight-forward adaptations of the transformer core for more T which have various applications such as broadband accurate modeling of actual transformer baluns, followed by impedance matching, power combining and dividing. -

Novel Implementations of Wideband Tightly Coupled Dipole Arrays for Wide-Angle Scanning
Novel Implementations of Wideband Tightly Coupled Dipole Arrays for Wide-Angle Scanning Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Ersin Yetisir, B.S., M.S. Graduate Program in Electrical and Computer Engineering The Ohio State University 2015 Dissertation Committee: John L. Volakis, Advisor Nima Ghalichechian, Co-advisor Chi-Chih Chen Fernando L. Teixeira © Copyright by Ersin Yetisir 2015 Abstract Ultra-wideband (UWB) antennas and arrays are essential for high data rate communications and for addressing spectrum congestion. Tightly coupled dipole arrays (TCDAs) are of particular interest due to their low-profile, bandwidth and scanning range. But existing UWB (>3:1 bandwidth) arrays still suffer from limited scanning, particularly at angles beyond 45° from broadside. Almost all previous wideband TCDAs have employed dielectric layers above the antenna aperture to improve scanning while maintaining impedance bandwidth. But even so, these UWB arrays have been limited to no more than 60° away from broadside. In this work, we propose to replace the dielectric superstrate with frequency selective surfaces (FSS). In effect, the FSS is used to create an effective dielectric layer placed over the antenna array. FSS also enables anisotropic responses and more design freedom than conventional isotropic dielectric substrates. Another important aspect of the FSS is its ease of fabrication and low weight, both critical for mobile platforms (e.g. unmanned air vehicles), especially at lower microwave frequencies. Specifically, it can be fabricated using standard printed circuit technology and integrated on a single board with active radiating elements and feed lines. -

Enhancing the Inductive Coupling and Efficiency of Wireless Power Transmission System by Using Metamaterials
Enhancing the inductive coupling and efficiency of wireless power transmission system by using metamaterials Sara Nishimura, Jorge de Almeida, Christian Vollaire, Carlos Sartori, Arnaud Bréard, Florent Morel, Laurent Krähenbühl To cite this version: Sara Nishimura, Jorge de Almeida, Christian Vollaire, Carlos Sartori, Arnaud Bréard, et al.. Enhanc- ing the inductive coupling and efficiency of wireless power transmission system by using metamaterials. MOMAG, Aug 2014, Curitiba, Brazil. pp.121-125. hal-01064690 HAL Id: hal-01064690 https://hal.archives-ouvertes.fr/hal-01064690 Submitted on 16 Sep 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. MOMAG 2014: 16º SBMO - Simpósio Brasileiro de Micro-ondas e Optoeletrônica e 11º CBMag - Congresso Brasileiro de Eletromagnetismo Enhancing the inductive coupling and efficiency of wireless power transmission system by using metamaterials Sara Izumi Nishimura1,2, Jorge Virgilio de Almeida1,4, Christian Vollaire1, Carlos A. F. Sartori2,3, Arnaud Breard1, Florent Morel1, Laurent Krähenbühl1 1Université de Lyon – Ampère (CNRS UMR5005, ECL), 69134 Écully, France 2Escola Politécnica – Universidade de São Paulo PEA/EPUSP - São Paulo-SP, Brazil 3Instituto de Pesquisas Energéticas e Nucleares IPEN/CNEN-SP - São Paulo-SP, Brazil 4Pontifícia Universidade Católica do Rio de Janeiro PUC-Rio - Rio de Janeiro-RJ, Brazil Abstract— Over recent years, the interest in using inductive Thus, a metamaterial arrangement suitable for the wireless power transmission for many applications has grown. -

Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors
Reliability Information Analysis Center (RIAC) Electronic Parts Reliability Data (EPRD) Part Category Descriptors The following pages contain the descriptors of all part categories covered by the 4-Volume RIAC Publication “Electronic Parts Reliability Data”, Catalog No. EPRD-2014. -
Unit V Rectifiers, Block Oscillators and Timebase
RECTIFIERS • A rectifier is an electrical device that converts AC supply into unidirectional DC supply. • This process of converting alternating current (AC) to direct current (DC) is also called as rectification. • These bridge rectifiers are available in different packages as modules ranging from few amperes to several hundred amperes. • Mostly in bridge rectifier circuits, semiconductor diode is used for converting AC since it allows the current flow in one direction only (Unidirectional device) Half Wave Rectifier •It is a simple type of rectifier made with single diode which is connected in series with load. • For small power levels this type of rectifier circuit is commonly used. •During the positive half of the AC input, diode becomes forward biased and currents starts flowing through it. •During the negative half of the AC input, diode becomes reverse biased and current stops flowing through it. •Because of high ripple content in the output, this type of rectifier is seldom used with pure resistive load. • The output DC voltage of a half wave rectifier can be calculated with the following two ideal equations Advantage •Simple circuit and low cost Disadvantage •The output current in the load contains, in addition to dc component, ac components of basic frequency equal to that of the input voltage frequency. •Ripple factor is high and an elaborate filtering is, therefore, required to give steady dc output. •The power output and, therefore, rectification efficiency is quite low. This is due to the fact that power is delivered only half the time. •Transformer Utilization Factor (TUF) is low. •DC saturation of transformer core resulting in magnetizing current and hysteresis losses and generation of harmonics. -

Solid State Tesla Coils Page 1 of 14
Solid State Tesla Coils Page 1 of 14 Solid State Tesla Coils How to Make Them, How They Work! Last updated 7/5/2005 Table of Contents: Preliminary cautions, notes, warnings, etc. Theory - Low Impedance Primary Feed (a good way) Theory - High Impedance Primary Feed (usually not so good) Theory - End Feed Without a Primary (can be good!) Theory - Energy Storage in the Primary (probably so-so at best) Dipole Vs. Monopole Coils (mainly monopoles discussed in this file) Actual Circuits - Low Impedance Primary Feed Actual Circuits - End Feed Design Example (untested) - Energy Storage in the Primary Helpful hints for building solid state Tesla coils! My Tesla coil top page and links to the Tesla coil web ring Preliminary Cautions, Notes, Warnings, etc. 1. The subject matter in this file assumes you already have some electronic project knowledge and skills. You ought to have some skills in building things, as well as electronic knowledge to the point of knowing simple AC circuit analysis, series and parallel resonant circuits, some amplifier and oscillator theory, and a bit of radio stuff. I hope you know what Armstrong, Hartley and Colpitts oscilators are and how they work. If not, you may still be able to build the stuff mentioned below and burn your house down, but knowing how the stuff below works will help if you don't quite get things working. This is not the place to learn the basics of electronics - spend a week or two reading library books if you have to. 2. Things may not work right the first time. -
Passive Devices for Communication Integrated Circuits
Berkeley Passive Devices for Communication Integrated Circuits Prof. Ali M. Niknejad U.C. Berkeley Copyright c 2014 by Ali M. Niknejad Niknejad Advanced IC's for Comm Outline Part I: Motivation Part II: Inductors Part III: Transformers Part IV: E/M Coupling Part V: mm-Wave Passives (if time permits) Niknejad Advanced IC's for Comm Motivation Why am [are] I [you] here? Niknejad Advanced IC's for Comm Passive Devices Equally important as active devices at RF/microwave frequencies Quality factor of resonators determines phase noise (key spec for high data rate communication) Transistor requires matching in order to obtain Maximum gain Low noise High power Lack of \ground plane" in CMOS requires careful design of return paths and AC bypass capacitors Niknejad Advanced IC's for Comm Innovations in IC?s VDD V +V − out out + Vin +Vin Vin +Vin Vin +Vin Vin +Vin VDD Vout VDD − − − − − VDD Some of the best ideas in the past 10 years have come from custom passive devices which were not in the \library" Examples: DAT, tapered resonator, artificial dielectric transmission lines (slow wave and meta-material structures) Ref: [Aoki] Niknejad Advanced IC's for Comm Why should \designers" be involved? They know their circuits best and can make the best decisions. There are many solutions to a give problem with competing trade-offs. Without knowing the trade-offs, it's hard to make a decision in a vacuum. The designer should be aware of the layout of the passive elements to be sure that \what you see is what you get".