Four-Coil Wireless Power Transfer Using Resonant Inductive Coupling Sravan Annam
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Active Balun with Center-Tapped Inductor and Double-Balanced Gilbert Mixer for GNSS Applications
electronics Article Active Balun with Center-Tapped Inductor and Double-Balanced Gilbert Mixer for GNSS Applications Daniel Pietron 1,* , Tomasz Borejko 1,2 and Witold Adam Pleskacz 1 1 Institute of Microelectronics & Optoelectronics, Warsaw University of Technology, ul. Koszykowa 75, 00-662 Warsaw, Poland; [email protected] or [email protected] (T.B.); [email protected] (W.A.P.) 2 ChipCraft Sp. z o.o., ul. Dobrza´nskiego3, lok. BS073, 20-262 Lublin, Poland * Correspondence: [email protected] Abstract: A new 1.575 GHz active balun with a classic double-balanced Gilbert mixer for global navigation satellite systems is proposed herein. A simple, low-noise amplifier architecture is used with a center-tapped inductor to generate a differential signal equal in amplitude and shifted in phase by 180◦. The main advantage of the proposed circuit is that the phase shift between the outputs is always equal to 180◦, with an accuracy of ±5◦, and the gain difference between the balun outputs does not change by more than 1.5 dB. This phase shift and gain difference between the outputs are also preserved for all process corners, as well as temperature and voltage supply variations. In the balun design, a band calibration system based on a switchable capacitor bank is proposed. The balun and mixer were designed with a 110 nm CMOS process, consuming only a 2.24 mA current from a 1.5 V supply. The measured noise figure and conversion gain of the balun and mixer were, respectively, NF = 7.7 dB and GC = 25.8 dB in the band of interest. -

The Study of Electromagnetic Processes in the Experiments of Tesla
The study of electromagnetic processes in the experiments of Tesla B. Sacco1, A.K. Tomilin 2, 1 RAI, Center for Research and Technological Innovation (Turin, Italy), [email protected] 2National Research Tomsk Polytechnic University (Tomsk, Russian Federation), [email protected] The Tesla wireless transmission of energy original experiment, proposed again in a downsized scale by K. Meyl, has been replicated in order to test the hypothesis of the existence of electroscalar (longitudinal) waves. Additional experiments have been performed, in which we have investigated the features of the electromagnetic processes between the two spherical antennas. In particular, the origin of coils resonances has been measured and analyzed. Resonant frequencies calculated on the basis of the generalized electrodynamic theory, are in good agreement with the experimental values found. Keywords: Tesla transformer, K. Meyl experiments, electroscalar waves, generalized electrodynamics, coil resonant frequency. 1. Introduction In the early twentieth century, Tesla conducted experiments in which he demonstrated unusual properties of electromagnetic waves. Results of experiments have been published in the newspapers, and many devices were patented (e.g. [1]). However, such work has not received suitable theoretical explanation, and so far no practical application of the results have been developed. One hundred years later, Professor K. Meyl [2] aimed to reproduce the same experiments using a miniature, laboratory version of the Tesla setup, arguing that it can help to detect unusual phenomena that are explained by the presence of electroscalar (longitudinal) waves, namely: • the reaction on the transmitter of the presence of the receiver; • the transmission of scalar waves with a speed of 1,5 times the speed of light; • the inefficiency of a Faraday cage in shielding scalar waves, and • the possibility of wireless transmission of electrical energy. -

Download (PDF)
Nanotechnology Education - Engineering a better future NNCI.net Teacher’s Guide To See or Not to See? Hydrophobic and Hydrophilic Surfaces Grade Level: Middle & high Summary: This activity can be school completed as a separate one or in conjunction with the lesson Subject area(s): Physical Superhydrophobicexpialidocious: science & Chemistry Learning about hydrophobic surfaces found at: Time required: (2) 50 https://www.nnci.net/node/5895. minutes classes The activity is a visual demonstration of the difference between hydrophobic and hydrophilic surfaces. Using a polystyrene Learning objectives: surface (petri dish) and a modified Tesla coil, you can chemically Through observation and alter the non-masked surface to become hydrophilic. Students experimentation, students will learn that we can chemically change the surface of a will understand how the material on the nano level from a hydrophobic to hydrophilic surface of a material can surface. The activity helps students learn that how a material be chemically altered. behaves on the macroscale is affected by its structure on the nanoscale. The activity is adapted from Kim et. al’s 2012 article in the Journal of Chemical Education (see references). Background Information: Teacher Background: Commercial products have frequently taken their inspiration from nature. For example, Velcro® resulted from a Swiss engineer, George Mestral, walking in the woods and wondering why burdock seeds stuck to his dog and his coat. Other bio-inspired products include adhesives, waterproof materials, and solar cells among many others. Scientists often look at nature to get ideas and designs for products that can help us. We call this study of nature biomimetics (see Resource section for further information). -

The Self-Resonance and Self-Capacitance of Solenoid Coils: Applicable Theory, Models and Calculation Methods
1 The self-resonance and self-capacitance of solenoid coils: applicable theory, models and calculation methods. By David W Knight1 Version2 1.00, 4th May 2016. DOI: 10.13140/RG.2.1.1472.0887 Abstract The data on which Medhurst's semi-empirical self-capacitance formula is based are re-analysed in a way that takes the permittivity of the coil-former into account. The updated formula is compared with theories attributing self-capacitance to the capacitance between adjacent turns, and also with transmission-line theories. The inter-turn capacitance approach is found to have no predictive power. Transmission-line behaviour is corroborated by measurements using an induction loop and a receiving antenna, and by visualising the electric field using a gas discharge tube. In-circuit solenoid self-capacitance determinations show long-coil asymptotic behaviour corresponding to a wave propagating along the helical conductor with a phase-velocity governed by the local refractive index (i.e., v = c if the medium is air). This is consistent with measurements of transformer phase error vs. frequency, which indicate a constant time delay. These observations are at odds with the fact that a long solenoid in free space will exhibit helical propagation with a frequency-dependent phase velocity > c. The implication is that unmodified helical-waveguide theories are not appropriate for the prediction of self-capacitance, but they remain applicable in principle to open- circuit systems, such as Tesla coils, helical resonators and loaded vertical antennas, despite poor agreement with actual measurements. A semi-empirical method is given for predicting the first self- resonance frequencies of free coils by treating the coil as a helical transmission-line terminated by its own axial-field and fringe-field capacitances. -

Tesla's Coil. a Toy Or Useful Thing in the Life of Radio Engineering?
УДК 537 Ільчук Д.Р. Tesla's coil. A toy or useful thing in the life of radio engineering? Вінницький національний технічний університет Аннотація. У цій статті, подан опис такого приладу як Котушка Тесли. Наведені її характеристики, принцип роботи, історія створення та значення в сучасному житті. Також описані процеси створення власноруч та розсуди про практичність даного виробу у реальному житті. Ключові слова: Котушка індуктивності, висока напруга, Нікола Тесла, радіотехніка, електрична дуга. Abstract. This article contains a description of the device as a Tesla coil. These characteristics of the principle of history and value creation in modern life. Also describes the process of creating his own judge and practicality of this product in real life. Keywords: Inductor, high voltage, Nikola Tesla, radio, electric arc. I.Introduction Perhaps in the life of every student comes a time when it begins to be interested in their field. In some it comes in the first year, someone on last. At the beginning of the 3rd year I finally decided to solder something with their hands. The choice immediately fell on Tesla coil. But is this thing so important, whether it is only a toy, which is impossible to do anything useful? Let us know about it. II. Summary The Tesla coil is an electrical resonant transformer circuit designed by inventor Nikola Tesla around 1891 as a power supply for his "System of Electric Lighting".It is used to produce high-voltage, low-current, high frequency alternating-current electricity. Tesla experimented with a number of different configurations consisting of two, or sometimes three, coupled resonant electric circuits. -

THE ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE the ULTIMATE Tesla Coil Design and CONSTRUCTION GUIDE
THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE THE ULTIMATE Tesla Coil Design AND CONSTRUCTION GUIDE Mitch Tilbury New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2008 by The McGraw-Hill Companies, Inc. All rights reserved. Manufactured in the United States of America. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. 0-07-159589-9 The material in this eBook also appears in the print version of this title: 0-07-149737-4. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. For more information, please contact George Hoare, Special Sales, at [email protected] or (212) 904-4069. TERMS OF USE This is a copyrighted work and The McGraw-Hill Companies, Inc. (“McGraw-Hill”) and its licensors reserve all rights in and to the work. Use of this work is subject to these terms. Except as permitted under the Copyright Act of 1976 and the right to store and retrieve one copy of the work, you may not decompile, disassemble, reverse engineer, reproduce, modify, create derivative works based upon, transmit, distribute, disseminate, sell, publish or sublicense the work or any part of it without McGraw-Hill’s prior consent. -

A Critical Review of Wireless Power Transfer Via Strongly Coupled Magnetic Resonances
Energies 2014, 7, 4316-4341; doi:10.3390/en7074316 OPEN ACCESS energies ISSN 1996-1073 www.mdpi.com/journal/energies Review A Critical Review of Wireless Power Transfer via Strongly Coupled Magnetic Resonances Xuezhe Wei 1,2,*, Zhenshi Wang 1,2 and Haifeng Dai 1,2 1 Clean Energy Automotive Engineering Center, Tongji University, Shanghai 201804, China; E-Mails: [email protected] (Z.W.); [email protected] (H.D.) 2 College of Automotive Studies, Tongji University, Shanghai 201804, China * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +86-21-6958-3764; Fax: +86-21-6958-9121. Received: 21 March 2014; in revised form: 9 May 2014 / Accepted: 30 June 2014 / Published: 7 July 2014 Abstract: Strongly coupled magnetic resonance (SCMR), proposed by researchers at MIT in 2007, attracted the world’s attention by virtue of its mid-range, non-radiative and high-efficiency power transfer. In this paper, current developments and research progress in the SCMR area are presented. Advantages of SCMR are analyzed by comparing it with the other wireless power transfer (WPT) technologies, and different analytic principles of SCMR are elaborated in depth and further compared. The hot research spots, including system architectures, frequency splitting phenomena, impedance matching and optimization designs are classified and elaborated. Finally, current research directions and development trends of SCMR are discussed. Keywords: wireless power transfer; strongly coupled magnetic resonances; mid-range non-radiative high-efficient power transfer 1. Introduction Wireless power transfer is not strange to human beings, since as early as 1889 Nikola Tesla had invented the famous Tesla coils which can transfer power wirelessly. -

EXTENSIONS of REMARKS July 18, 1989 EXTENSIONS of REMARKS COMMEMORATING NIKOLA Has Been Called the Forgotten Genius
15076 EXTENSIONS OF REMARKS July 18, 1989 EXTENSIONS OF REMARKS COMMEMORATING NIKOLA has been called the Forgotten Genius. Universities of Paris and Graz and the Poly TESLA There is not only the known and the un technical School in Bucharest in 1937, the known Tesla, but the unknowable-called by University of Grenoble in 1938, and the Uni some an eccentric, by others a mystic, a vi versity of Sofia in 1939. HON. GEORGE W. GEKAS sionary, and a person of extraordinary Tesla was made a member or honorary OF PENNSYLVANIA powers of perception . And so Nikola fellow of various academic and professional Tesla's memory is virtually venerated by societies: the American Association for the IN THE HOUSE OF REPRESENTATIVES some and utterly neglected by many more. Advancement of Science in 1895, the Ameri Tuesday, July 18, 1989 Tesla deserves to be known better. can Electro-Therapeutic Association in 1903, It is not my purpose today to describe the New York Academy of Sciences in 1907, Mr. GEKAS. Mr. Speaker, I would like to Tesla's life and works. This has already the American Institute of Electrical Engi take this opportunity to honor the 133d anni been done by dozens of biographers and his neers in 1917, the Serbian Academy of Sci versary of the birth of a scientist whose inven torians of science. Perhaps it is enough ences in Belgrade in 1937, and many others. tions sit in the ranks with those of Edison, merely to cite a readily available source The medals and other honors which he re Watts, and Marconi. -
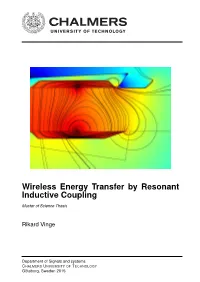
Wireless Energy Transfer by Resonant Inductive Coupling
Wireless Energy Transfer by Resonant Inductive Coupling Master of Science Thesis Rikard Vinge Department of Signals and systems CHALMERS UNIVERSITY OF TECHNOLOGY Göteborg, Sweden 2015 Master’s thesis EX019/2015 Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge Department of Signals and systems Division of Signal processing and biomedical engineering Signal processing research group Chalmers University of Technology Göteborg, Sweden 2015 Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge © Rikard Vinge, 2015. Main supervisor: Thomas Rylander, Department of Signals and systems Additional supervisor: Johan Winges, Department of Signals and systems Examiner: Thomas Rylander, Department of Signals and systems Master’s Thesis EX019/2015 Department of Signals and systems Division of Signal processing and biomedical engineering Signal processing research group Chalmers University of Technology SE-412 96 Göteborg Telephone +46 (0)31 772 1000 Cover: Magnetic field lines between the primary and secondary coil in a wireless energy transfer system simulated in COMSOL. Typeset in LATEX Göteborg, Sweden 2015 iv Wireless Energy Transfer by Resonant Inductive Coupling Rikard Vinge Department of Signals and systems Chalmers University of Technology Abstract This thesis investigates wireless energy transfer systems based on resonant inductive coupling with applications such as charging electric vehicles. Wireless energy trans- fer can be used to power or charge stationary and moving objects and vehicles, and the interest in energy transfer over the air has grown considerably in recent years. We study wireless energy transfer systems consisting of two resonant circuits that are magnetically coupled via coils. Further, we explore the use of magnetic materials and shielding metal plates to improve the performance of the energy transfer. -

(12) United States Patent (10) Patent No.: US 7,053,576 B2 Correa Et Al
US007053576B2 (12) United States Patent (10) Patent No.: US 7,053,576 B2 Correa et al. (45) Date of Patent: May 30, 2006 (54) ENERGY CONVERSION SYSTEMS 5,416,391 A 5/1995 Correa et al. 5.449,989 A 9, 1995 Correa et al. (76) Inventors: Paulo N. Correa, 42 Rockview 6,271,614 B1* 8/2001 Arnold ....................... 310,233 Gardens, Concord, Ontario (CA) L4K OTHER PUBLICATIONS 2J6; Alexandra N. Correa, 42 Rockview Gardens, Concord, Ontario Kuhn, T.S. (1978) “Black-body Theory and the Quantum (CA) L4K 2J6 Discontinuity, 1898-1912. The University of Chicago Press, pp. 246-249, 289-290. (*) Notice: Subject to any disclaimer, the term of this Wang, LJ et al (2000) “Gain-assisted superluminal light patent is extended or adjusted under 35 propagation, Nature, 406:277. U.S.C. 154(b) by 0 days. Martin, Thomas Commerfold (1894) “The Inventions, Researches and Writlings of Nikola Tesla'. The Electrical (21) Appl. No.: 10/270,154 Engineer, New York, p. 68. Tesla, Nikola (1956) “Lectures, Patents, Articles”, Nikola (22) Filed: Oct. 15, 2002 Tesla Museum, Beograd, Yugolsavia, L-70-71 & L-130-132 (Figure 16.II). (65) Prior Publication Data US 2006/0O82334 A1 Apr. 20, 2006 (Continued) Primary Examiner Bentsu Ro Related U.S. Application Data (74) Attorney, Agent, or Firm—Ridout & Maybee LLP (63) Continuation of application No. 09/907.823, filed on Jul. 19, 2001, now abandoned. (57) ABSTRACT (51) Int. C. This invention relates to apparatus for the conversion of H05B 3L/48 (2006.01) massfree energy into electrical or kinetic energy, which uses (52) U.S. -

Novel Implementations of Wideband Tightly Coupled Dipole Arrays for Wide-Angle Scanning
Novel Implementations of Wideband Tightly Coupled Dipole Arrays for Wide-Angle Scanning Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Ersin Yetisir, B.S., M.S. Graduate Program in Electrical and Computer Engineering The Ohio State University 2015 Dissertation Committee: John L. Volakis, Advisor Nima Ghalichechian, Co-advisor Chi-Chih Chen Fernando L. Teixeira © Copyright by Ersin Yetisir 2015 Abstract Ultra-wideband (UWB) antennas and arrays are essential for high data rate communications and for addressing spectrum congestion. Tightly coupled dipole arrays (TCDAs) are of particular interest due to their low-profile, bandwidth and scanning range. But existing UWB (>3:1 bandwidth) arrays still suffer from limited scanning, particularly at angles beyond 45° from broadside. Almost all previous wideband TCDAs have employed dielectric layers above the antenna aperture to improve scanning while maintaining impedance bandwidth. But even so, these UWB arrays have been limited to no more than 60° away from broadside. In this work, we propose to replace the dielectric superstrate with frequency selective surfaces (FSS). In effect, the FSS is used to create an effective dielectric layer placed over the antenna array. FSS also enables anisotropic responses and more design freedom than conventional isotropic dielectric substrates. Another important aspect of the FSS is its ease of fabrication and low weight, both critical for mobile platforms (e.g. unmanned air vehicles), especially at lower microwave frequencies. Specifically, it can be fabricated using standard printed circuit technology and integrated on a single board with active radiating elements and feed lines. -
Introduction to Tesla Coil
INTRODUCTION TO TESLA COIL Definition A Tesla coil is a type of resonant transformer circuit invented by Nikola Tesla around 1891. It is used to produce high voltage, relatively high current, and high frequency alternating current electricity. Introduction Tesla experimented with a number of different configurations and they consist of two, or sometimes three, coupled resonant electric circuits. Tesla used these coils to conduct innovative experiments in electrical lighting, phosphorescence, x-ray generation, high frequency alternating current phenomena, electrotherapy, and the transmission of electrical energy without wires. The early Tesla coil transformer design employs a medium- to high-voltage power source, one or more high voltage capacitor(s), and a spark gap to excite a multiple- layer primary inductor with periodic bursts of high frequency current. The multiple-layer Tesla coil transformer secondary is excited by resonant inductive coupling, the primary and secondary circuits both being tuned so they resonate at the same frequency (typically, between 25 kHz and 2 MHz). The later and higher-power coil design has a single-layer primary and secondary. These Tesla coils are often used by hobbyists and at venues such as science museums to produce long sparks. Tesla coil circuits were used commercially in sparkgap radio transmitters for wireless telegraphy until the 1920s, and in electrotherapy and pseudomedical devices such as violet ray (although Tesla circuits were not the first or the only ones used in spark transmitters). Today their main use is entertainment and educational displays. Tesla coils are built by many high-voltage enthusiasts, research institutions, science museums and independent experimenters.