Electric Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cahier Technique No. 207
Collection Technique .......................................................................... Cahier technique no. 207 Electric motors ... and how to improve their control and protection E. Gaucheron Building a New Electric World "Cahiers Techniques" is a collection of documents intended for engineers and technicians, people in the industry who are looking for more in-depth information in order to complement that given in product catalogues. Furthermore, these "Cahiers Techniques" are often considered as helpful "tools" for training courses. They provide knowledge on new technical and technological developments in the electrotechnical field and electronics. They also provide better understanding of various phenomena observed in electrical installations, systems and equipments. Each "Cahier Technique" provides an in-depth study of a precise subject in the fields of electrical networks, protection devices, monitoring and control and industrial automation systems. The latest publications can be downloaded from the Schneider Electric internet web site. Code: http://www.schneider-electric.com Section: Press Please contact your Schneider Electric representative if you want either a "Cahier Technique" or the list of available titles. The "Cahiers Techniques" collection is part of the Schneider Electric’s "Collection technique". Foreword The author disclaims all responsibility subsequent to incorrect use of information or diagrams reproduced in this document, and cannot be held responsible for any errors or oversights, or for the consequences of using information and diagrams contained in this document. Reproduction of all or part of a "Cahier Technique" is authorised with the compulsory mention: "Extracted from Schneider Electric "Cahier Technique" no. ....." (please specify). no. 207 Electric motors ... and how to improve their control and protection Etienne Gaucheron Graduate electronics engineer by training. -

POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-Μc LSPT)
POWER ELECTRONICS TRAINER (Model : XPO-PE) / MICROCONTROLLER BASED PE (Model : XPO-µC LSPT) SALIENT FEATURES u Aesthetically designed injection molded electronic desk. u Master unit carrying useful experiment resources like line Synchronized firing circuits, Power supplies, lamp load, RLC loads, Battery charging supply etc. while the central slot will hold replaceable experiment panels. u Each multi experiment panel is secured in an ABS molded plastic sturdy enclosure, and has colorful screw less overlay showing circuit & Connection through Sturdy 4mm Banana Sockets & Patch Chords. u Set of User Guide provided with each unit. u Order 6 Master units and set of 6 panels (PE 1 x 2 , PE2, PE3, PE6X2nos)+ Power scope, buy more of PE1 and PE6 being major panels. Master Unit Accessories: Built in power supply l 15 pin D connector cable assembly, u DC supply : + 12V, 500mA, l 4mm patchcords : 100mm X 10 Nos & 500mm X 20 Nos. u Unregulated Power supply 17V / 750mA, Optional Power Scope u Regulated 7VDC to 14VDC/3A O/P is provided as 12V Battery charging supply. In absence of battery, same may be used as simulated battery source to run experiments on inverters etc. u Isolated DC supply +12V/ 300mA with isolated common. u On board Inverter transformer of Primary & Secondaries: 12-11-0- 11-12/3A. u On board o/p to Isolated Drive Circuit AC supply u 230V AC line voltage is made available on two banana 4mm Accessory for any Lab CRO for off ground differential measurements sockets as well as 1.5A fuse extender for variac if used. -

Universal Motor - Construction, Working and Characteristics
Universal Motor - construction, working and characteristics. A universal motor is a special type of motor which is designed to run on either DC or single phase AC supply. These motors are generally series wound (armature and field winding are in series), and hence produce high starting torque (See characteristics of DC motors here). That is why, universal motors generally comes built into the device they are meant to drive. Most of the universal motors are designed to operate at higher speeds, exceeding 3500 RPM. They run at lower speed on AC supply than they run on DC supply of same voltage, due to the reactance voltage drop which is present in AC and not in DC. There are two basic types of universal motor : (i)compensated type and (ii) uncompensated type. Construction of Universal motor Construction of a universal motor is very similar to the construction of a DC machine. It consists of a stator on which field poles are mounted. Field coils are wound on the field poles. However, the whole magnetic path (stator field circuit and also armature) is laminated. Lamination is necessary to minimize the eddy currents which induce while operating on AC. The rotary armature is of wound type having straight or skewed slots and commutator with brushes resting on it. The commutation on AC is poorer than that for DC. because of the current induced in the armature coils. For that reason brushes used are having high resistance. Working of universal motor A universal motor works on either DC or single phase AC supply. When the universal motor is fed with a DC supply, it works as a DC series motor. -
ELECTRICAL SCIENCE Module 10 AC Generators
DOE Fundamentals ELECTRICAL SCIENCE Module 10 AC Generators Electrical Science AC Generators TABLE OF CONTENTS Table of Co nte nts TABLE OF CONTENTS ................................................................................................... i LIST OF FIGURES ...........................................................................................................ii LIST OF TABLES ............................................................................................................ iii REFERENCES ................................................................................................................iv OBJECTIVES .................................................................................................................. v AC GENERATOR COMPONENTS ................................................................................. 1 Field ............................................................................................................................. 1 Armature ...................................................................................................................... 1 Prime Mover ................................................................................................................ 1 Rotor ............................................................................................................................ 1 Stator ........................................................................................................................... 2 Slip Rings ................................................................................................................... -

UNIVERSAL MOTORS Universal Motor
UNIVERSAL MOTORS Universal motor The motors which can be used with a single phase AC source as well as a DC source of supply and voltages are called as Universal Motor. It is also known as Single Phase Series Motor. A universal motor is a commutation type motor. Construction of the universal motor The construction of the universal motor is same as that of the series motor. I n o rd e r t o m i n i m i z e t h e p ro b l e m o f commutation, high resistance brushes with increased brush area are used. To reduce Eddy current losses the stator core and yoke are laminated. The Universal motor is simple and less costly. It is used usually for rating not greater than 7 5 0 W . Characteristic of Universal motor The characteristic of Universal motor is similar to that of the DC series motor. When operating from an AC supply, the series motor develops less torque. By interchanging connections of the fields with respect to the armature, the direction of rotation can be altered. Universal motor T h e d i r e c t i o n o f t h e developed torque will re m a i n p o s i t i v e , a n d direction of the rotation will be as it was before. The nature of the torque will be pulsating, and the frequency will be twice that of line frequency as shown in the waveform. Universal motor Thus, a Universal motor can work on both AC and DC. -

Physics, Chapter 32: Electromagnetic Induction
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 32: Electromagnetic Induction Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 32: Electromagnetic Induction" (1958). Robert Katz Publications. 186. https://digitalcommons.unl.edu/physicskatz/186 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 32 Electromagnetic Induction 32-1 Motion of a Wire in a Magnetic Field When a wire moves through a uniform magnetic field of induction B, in a direction at right angles to the field and to the wire itself, the electric charges within the conductor experience forces due to their motion through this magnetic field. The positive charges are held in place in the conductor by the action of interatomic forces, but the free electrons, usually one or two per atom, are caused to drift to one side of the conductor, thus setting up an electric field E within the conductor which opposes the further drift of electrons. The magnitude of this electric field E may be calculated by equating the force it exerts on a charge q, to the force on this charge due to its motion through the magnetic field of induction B; thus Eq = Bqv, from which E = Bv. -

Design and Simulation of Leakage Current in Smart Power Module (Spm) Motor Drive Application
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by UTHM Institutional Repository DESIGN AND SIMULATION OF LEAKAGE CURRENT IN SMART POWER MODULE (SPM) MOTOR DRIVE APPLICATION SYAHFITRI BIN SAIDIN A project report submitted in partial fulfillment of the requirement for the award of the Degree of Master of Electrical Engineering Faculty Of Electrical And Electronics Engineering Universiti Tun Hussein Onn Malaysia DECEMBER 2013 vi CONTENTS TITLE i DECLARATION ii DEDICATION iii ACKNOWLEDGEMENT iv ABSTRACT v CONTENTS vi LIST OF FIGURES x LIST OF TABLES xiv LIST OF SYMBOL AND ABBREAVIATION xv LIST OF APPENDIXES xvi CHAPTER 1 INTRODUCTION 1.1 General Background of Electric Motor 1 1.2 Universal Motor 3 1.2.1 Properties of Universal Motor 4 1.2.2 Applications of Universal Motor 6 1.3 DC Motor 7 1.3.1 Brush DC Motor 8 1.3.2 Brushless DC Motor 9 1.3.3 Permanent Magnet Stators 9 1.4 Smart Power Module (SPM) 10 1.5 Problem Statement 12 vii 1.6 Objectives and Scopes 1.6.1 Objective 13 1.6.2 Scope of Work 14 1.6.3 Thesis Overview 14 CHAPTER 2 LITERATURE REVIEW 2.1 Introduction 16 2.2 What Is Leakage Current? 16 2.2.1 Why Is It Important? 17 2.2.2 What Causes Leakage Current? 17 2.2.3 What Is A Safe Level 18 2.3 Direct Current Motor (Dc Motor) 19 2.3.1 Principle Of Dc Motor 19 2.3.2 Detailed Description Of A Dc Motor 21 2.3.3 Working Or Operating Principle Of Dc Motor 23 2.3.4 Construction Of Dc Motor 28 2.3.5 Permanent Magnet Stators 29 2.3.6 Electrical Connections Between The Stator And Rotor 30 2.4 Electricity Consumption By Electrical Motor Systems 31 2.5 Motor Efficiency 33 2.6 Brushless DC Motors (BLDC) 35 2.6.1 Brushless Vs. -

Design of a Rail Gun System for Mitigating Disruptions in Fusion Reactors
© Copyright 2017 Wei-Siang Lay Design of a Rail Gun System for Mitigating Disruptions in Fusion Reactors Wei-Siang Lay A thesis submitted in partial fulfillment of the requirements for the degree of Masters of Science University of Washington 2017 Reading Committee: Thomas R. Jarboe, Chair Roger Raman, Thesis Advisor Program Authorized to Offer Degree: Aeronautics & Astronautics University of Washington Abstract Design of a Rail Gun System for Mitigating Disruptions in Fusion Reactors Wei-Siang Lay Chair of the Supervisory Committee: Thomas R. Jarboe Aeronautics & Astronautics Magnetic fusion devices, such as the tokamak, that carry a large amount of current to generate the plasma confining magnetic fields have the potential to lose magnetic stability control. This can lead to a major plasma disruption, which can cause most of the stored plasma energy to be lost to localized regions on the walls, causing severe damage. This is the most important issue for the $20B ITER device (International Thermonuclear Experimental Reactor) that is under construction in France. By injecting radiative materials deep into the plasma, the plasma energy could be dispersed more evenly on the vessel surface thus mitigating the harmful consequences of a disruption. Methods currently planned for ITER rely on the slow expansion of gases to propel the radiative payloads, and they also need to be located far away from the reactor vessel, which further slows down the response time of the system. Rail guns are being developed for aerospace applications, such as for mass transfer from the surface of the moon and asteroids to low earth orbit. A miniatured version of this aerospace technology seems to be particularly well suited to meet the fast time response needs of an ITER disruption mitigation system. -
Electrician 3Rd Semester - Module 1 : DC Generator
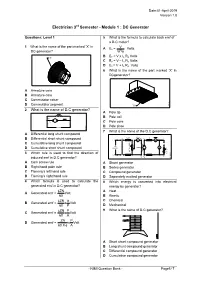
Electrician 3rd Semester - Module 1 : DC Generator Questions: Level 1 5 What is the formula to calculate back emf of a D.C motor? 1 What is the name of the part marked ‘X’ in V A Eb = Volts DC generator? IaRa B Eb = V x Ia Ra Volts C Eb = V – Ia Ra Volts D Eb = V + Ia Ra Volts 6 What is the name of the part marked ‘X’ in DCgenerator? A Armature core B Armature core C Commutator raiser D Commutator segment 2 What is the name of D.C generator? A Pole tip B Pole coil C Pole core D Pole shoe 7 What is the name of the D.C generator? A Differential long shunt compound B Differential short shunt compound C Cumulative long shunt compound D Cumulative short shunt compound 3 Which rule is used to find the direction of induced emf in D.C generator? A Cork screw rule A Shunt generator B Right hand palm rule B Series generator C Fleming’s left hand rule C Compound generator D Fleming’s right hand rule D Separately excited generator 4 Which formula is used to calculate the 8 Which energy is converted into electrical generated emf in D.C generator? energy by generator? φZN A Heat A Generated emf = Volt 60 B Kinetic φZN A C Chemical B Generated emf = x Volt 60 P D Mechanical φZN P 9 What is the name of D.C generator? C Generated emf = x Volt 60 A ZN P D Generated emf = x Volt 60 X φ A A Short shunt compound generator B Long shunt compound generator C Differential compound generator D Cumulative compound generator - NIMI Question Bank - Page1/ 7 10 What is the principle of D.C generator? 14 How many parallel paths in duplex lap A Cork screw rule winding -

DC Motor, How It Works?
DC Motor, how it works? You can find DC motors in many portable home appliances, automobiles and types of industrial equipment. In this video we will logically understand the operation and construction of a commercial DC motor. The Working Let’s first start with the simplest DC motor possible. It looks like as shown in the Fig.1. The stator is a permanent magnet and provides a constant magnetic field. The armature, which is the rotating part, is a simple coil. Fig.1 A simplified D.C motor, which runs with permanent magnet The armature is connected to a DC power source through a pair of commutator rings. When the current flows through the coil an electromagnetic force is induced on it according to the Lorentz law, so the coil will start to rotate. The force induced due to the electromagnetic induction is shown using 'red arrows' in the Fig.2. Fig.2 The electromagnetic force induced on the coils make the armature coil rotate You will notice that as the coil rotates, the commutator rings connect with the power source of opposite polarity. As a result, on the left side of the coil the electricity will always flow ‘away ‘and on the right side , electricity will always flow ‘towards ‘. This ensures that the torque action is also in the same direction throughout the motion, so the coil will continue rotating. Fig.3 The commutator rings make sure a uni-directional current flows through the left and right part of the coil Improving the Torque action But if you observe the torque action on the coil closely, you will notice that, when the coil is nearly perpendicular to the magnetic flux, the torque action nears zero. -

Brush DC Motor Runs Along Dan Jones, Incremotion Associates
TECHNICAL Brush DC Motor Runs Along Dan Jones, Incremotion Associates Everything started in 1800 when Volta developed the first DC battery. Fara- day used the DC battery to develop the first electric motor. It used brushes to transfer the battery voltage and cur- rent to the rotating disk rotor. This was in mid-1831. Thus was born the brush DC motor. Construction The slotted brush DC motor of today comes in two basic configurations: the wound field DC motor and the perma- nent magnet DC motor. The key parts of a DC motor include the armature (the rotating part), the field (either a cop- per winding or permanent magnet), and a mechanical commutation sys- tem consisting of a slotted commutator, mechanical brushes with copper wires connecting to outside terminals. The commutator is connected to various windings in a sequential pattern. The two brushes ride on the commutator to connect to the battery or outside power source via the terminals as shown in Figure 1. These brush DC motor types are called slotted or iron core types. Motor Operation The DC motor is the simplest motor type. Raise the input voltage and the motor speeds up. Lower the voltage and it reduces speed. Increase the mo- tor’s shaft load and shaft torque and armature current go up while the speed goes down. The permanent magnet DC motor is the most popular type, replac- ing the three wound field DC motors in many applications. Today the most Figure 1 Permanent magnet DC motor structure. popular wound field DC motor has an- other name—the universal motor—a separate motor type because it can be driven by AC and DC input power. -

Basics of DC Motors
You’ve got a DC (direct current) motor down and you need it repaired, but you aren’t just responsible for keeping things running but keeping the repairs within budget. How can you tell if you are getting a reasonable repair quote if you don’t know what kind of repairs are common for DC motors? That’s the purpose of this article: to provide solid facts so you can make an informed decision about repairing that DC motor that has brought production to a grinding halt. Basics of DC Motors DC motors can be found in elevators, hoists, steel rolling mill drives, turntables, conveyor belts, mixers, printing presses, extruders, and more. These motors used direct current (DC) as opposed to alternating current (AC) and their speed can be adjusted by either adjusting the static field current or the voltage that is applied to the armature. Types of DC Motors The four types of DC motors are shunt wound motors, series wound motors, permanent magnet, and compound motors. Shunt motors are typically used for speed regulation made possible because the shunt field can be excited separately from the armature windings. Series motors generate excellent starting torque but don’t offer much in the way of speed regulation. Permanent magnetic motors are typically limited to low horsepower applications. Compound motors offer a good starting torque but don’t do well in variable speed applications. You also have other variations of DC motors that are unique variations and designs of these 4 types. Basic Components of a DC Motor DC motors will have a field frame that contains the field coils and an armature with windings wrapped around a core made of iron.