Senior Design II Final Documentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Beyond Schematic Capture Meaningful Abstractions for Better Electronics Design Tools
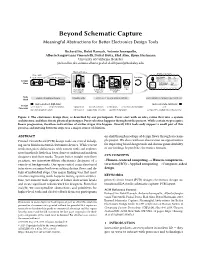
Beyond Schematic Capture Meaningful Abstractions for Better Electronics Design Tools Richard Lin, Rohit Ramesh, Antonio Iannopollo, Alberto Sangiovanni Vincentelli, Prabal Dutta, Elad Alon, Björn Hartmann University of California, Berkeley {richard.lin,rkr,antonio,alberto,prabal,elad,bjoern}@berkeley.edu Physical Device Parts Selection Ideas and ATmega Part Number Size Vf +3.3v Iteration Requirements System Architecture OVLFY3C7 5mm 2 V D0 APG1005SYC-T 0402 2.05 V Button J1 Design Micro- D1 5988140107F 0805 2 V D1 controller - or - ... SW1 Part Number Core LED Flow R1 U1 R2 ATmega32u4 AVR GND Micro- controller LPC1549 ARM CM3 Final FE310-G000 RV32IMAC Hand-built Schematic Prototype PCB Prototypes Capture PCB Tools paper, drawing software breadboards EDA suites: Altium, EAGLE, KiCAD parts libraries, catalogs, spreadsheets Used more abstract, high-level more concrete, low-level Design user stories implementation exploration documentation verification cost, manufacturability cost Concerns functional specification verification supporting circuitry system integration component availability and sourcing Figure 1: The electronics design flow, as described by our participants. Users start with an idea, refine that intoasystem architecture, and then iterate physical prototypes. Parts selection happens throughout the process. While certain steps require linear progression, iteration and revision of earlier stages also happen. Overall, EDA tools only support a small part of this process, and moving between steps was a major source of friction. ABSTRACT on clickthrough mockups of design flows through an exam- Printed Circuit Board (PCB) design tools are critical in help- ple project. We close with our observation on opportunities ing users build non-trivial electronics devices. While recent for improving board design tools and discuss generalizability work recognizes deficiencies with current tools and explores of our findings beyond the electronics domain. -
Digital Sensors Operate on 3.3V
Worcester Polytechnic Institute A Major Qualifying Project AURORA Autonomous Unpowered Recovery of Radiosonde Aircraft Submitted By: Richard Eberheim, Robotics Engineering Nicholas Hassan, Robotics Engineering and Electrical & Computer Engineering Joshua O’Connor, Mechanical Engineering Advised By: Kenneth Stafford, Professor Robotics Engineering, Mechanical Engineering Fred Looft, Professor Electrical Engineering This report represents the work of WPI undergraduate students submitted to the faculty as evidence of completion of a degree requirement. WPI routinely publishes these reports on its website without editorial or peer review. For more information about the projects program at WPI, please see http://www.wpi.edu/academics/ugradstudies/project-learning.html Abstract This project developed an autonomous radiosonde glider that actively steers itself from the apex of its flight to safe recovery locations on the ground. This enables easy and reliable recovery, reducing costs and offering new capabilities to atmospheric researchers. The glider integrates the essential weather sensors used on current radiosondes with those needed for autonomous flight in a durable, easy to manufacture airframe capable of multiple data gathering flights with minimal repairs between each flight. 1 Acknowledgments This project was made possible through the support, guidance, and assistance of the staff and students of Worcester Polytechnic Institute. We would like to thank Professors Ken Stafford and Fred Looft for advising the project. We would also like -

Metadefender Core V4.17.3
MetaDefender Core v4.17.3 © 2020 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of MetaDefender Core 14 1. Quick Start with MetaDefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Process Files with MetaDefender Core 21 2. Installing or Upgrading MetaDefender Core 22 2.1. Recommended System Configuration 22 Microsoft Windows Deployments 22 Unix Based Deployments 24 Data Retention 26 Custom Engines 27 Browser Requirements for the Metadefender Core Management Console 27 2.2. Installing MetaDefender 27 Installation 27 Installation notes 27 2.2.1. Installing Metadefender Core using command line 28 2.2.2. Installing Metadefender Core using the Install Wizard 31 2.3. Upgrading MetaDefender Core 31 Upgrading from MetaDefender Core 3.x 31 Upgrading from MetaDefender Core 4.x 31 2.4. MetaDefender Core Licensing 32 2.4.1. Activating Metadefender Licenses 32 2.4.2. Checking Your Metadefender Core License 37 2.5. Performance and Load Estimation 38 What to know before reading the results: Some factors that affect performance 38 How test results are calculated 39 Test Reports 39 Performance Report - Multi-Scanning On Linux 39 Performance Report - Multi-Scanning On Windows 43 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. -

PCB CAD / EDA Software and Where to Get It……
Useful engineering information from Sphere Research Corporation By: walter shawlee 2 PCB CAD / EDA Software and where to get it…… Fortunately for cash-strapped engineering students, most commercial packages have demo versions of the real software, or are completely free open source software. Keep in mind, the critical issue is the WORK , not the TOOL . If you understand the ideas, you can learn any package, although each tool has its own internal capabilities, issues and quirks to master. Here are some of the major paid packages in use today: Altium Designer from Altium, see: http://www.altium.com/en/products/downloads Evaluate: http://www.altium.com/free-trial Also, they own the legacy apps, P-cad , Protel and Easytrax , see them here: http://techdocs.altium.com/display/ALEG/Legacy+Downloads OrCAD from Cadence, see: http://www.orcad.com/ Evaluate: http://www.orcad.com/buy/try-orcad-for-free Eagle from CadSoft, see: http://www.cadsoftusa.com/eagle-pcb-design-software/about-eagle/ Evaluate (freeware version): http://www.cadsoftusa.com/download-eagle/freeware/ Pads from Mentor Graphics, see: http://www.mentor.com/pcb/pads/ Evaluate: http://www.pads.com/try.html?pid=mentor Here are key Open-Source Free PCB CAD packages: KiCad , see: http://www.kicad- pcb.org/display/KICAD/KiCad+EDA+Software+Suite key packages: Eeschema, PCBnew, Gerbview Works on all platforms. DESIGNSPARK , see: http://www.rs-online.com/designspark/electronics/ They also have a free mechanical design package. Linux operation using WINE and Mac operation using Crossover or Play On Mac is noted as possible, but not directly supported. -

Diptrace Tutorial
Introduction DipTrace Tutorial allows the reader to get started by designing a simple schematic and its PCB, we will also design a component and practice with more advanced features. This step-by-step tutorial is intended for gradual reading starting from the beginning, with more simple topics at the top and more complex (where we assume that you already know the basics) at the bottom. For a quick answer, please refer to the corresponding Help document ("Help \ <DipTrace module> Help" from the main menu). Created for DipTrace version 3.0 (June 14, 2016). Contents 3 Table of Contents Part I: Creating a simple schematic 5 1 Schem.a..t.i.c.. .U..I......................................................................................................................... 6 Schematic mai.n.. .w...i.n...d..o..w.... ....................................................................................................................................... 6 Custom keybo.a..r..d.. .h..o...t.k..e...y..s.. ................................................................................................................................... 7 2 Establi.s.h..i.n..g.. .s..c.h..e..m...a..t.i.c.. .s..i.z.e.. .a..n..d.. .p..l.a..c..i.n..g.. .t.i.t.l.e..s....................................................................... 8 3 Config..u..r.i.n..g.. .l.i.b..r..a..r.i.e..s............................................................................................................ 11 4 Desig.n..i.n..g.. .a.. .s.c..h..e..m...a..t.i.c........................................................................................................ -

Kullanım Kılavuzuna Hoş Geldiniz
1 4.1.3.1 Türkçe Sürüme göre hazırlanmıştır Hazırlayanlar Mehmet KAYA Fazıl DEMİR © 2021 Novarm Software DipTrace Kullanım Kılavuzu Sürüm 4.1.3.1 Türkçe Sürüme göre hazırlanmıştır Hazırlayanlar Mehmet KAYA Fazıl DEMİR Hazırlayanlar Mehmet KAYA Önsöz DipTrace kullanım kılavuzuna hoş geldiniz. Bu kullanım kılavuzu, DipTrace’yi başarıyla kullanabilmeniz için DipTrace’nin tüm modüllerine ait standart çalışma prensiplerinin ayrıntılı açıklamalarını, adım adım talimatları takip ederek tüm temel bilgileri kazanmanızı sağlayacaktır. Aynı zamanda elektronik mühendisliği alanında hem profesyonel hem de yeni başlayanlar için faydalı bir araç olacaktır. Bölüm I, II ve III' te basit bir şema ve PCB oluşturacağız. Bölüm IV' te yeni elemanlar oluşturma ve kütüphanelerle çalışma alıştırması yapacağız ve son olarak, Bölüm V' te daha gelişmiş özellikleri kullanma alıştırması yapacağız. DipTrace’nin Türkçe internet sayfası http://www.diptrace.com/tr dir. Türkçe dil dosyalarını da buradan indirerek programı Türkçe olarak kullanabilirsiniz. DipTrace internet sayfasında bulunan Destek Formu’nu doldurarak gerekli yardımı alabilirsiniz. Bu kullanım kılavuzu, DipTrace’nin 4.1.3.1 sürümüne göre hazırlanmıştır. Bu kılavuzdaki ekran resimleri okunaklı olması için 1024x768 çözünürlükte alınmıştır. Sizin bilgisayarınızdaki ekran görüntüsünde farklılılar olabilir. Giriş 5 İçindekiler GİRİŞ ………… .................................................................................................................................................7 1. Basit Bir Şema Oluşturma -

Computer Aided Design of Electronic Devices
TOMSK POLYTECHNIC UNIVERSITY O.A. Kozhemyak, D.N. Ogorodnikov COMPUTER AIDED DESIGN OF ELECTRONIC DEVICES It is recommended for publishing as a study aid by the Editorial Board of Tomsk Polytechnic University Tomsk Polytechnic University Publishing House 2014 1 UDC 621.38(075.8) BBC 31.2 K58 Kozhemyak O.A. K58 Computer aided design of electronic devices: study aid / O.A. Kozhemyak, D.N. Ogorodnikov; Tomsk Polytechnic University. – Tomsk: TPU Publishing House, 2014. – 130 p. This textbook focuses on the basic notions, history, types, technology and applications of computer-aided design. Methods of electronic devices simulation, automated design of power electronic devices and components, constructive- technological design are considered and discussed. Some features of the popular electronics CADs are also shown. There are a lot of practical examples using CADs of electronics. The textbook is designed at the Department of Industrial and Medical Electronics of TPU. It is intended for students majoring in the specialty „Electronics and Nanoelectronics‟. UDC 621.38(075.8) BBC 31.2 Reviewer Cand.Sc, Head of Laboratory, Tomsk State University of Control Systems and Radioelectronics Aleksandr V. Osipov © STE HPT TPU, 2014 © Kozhemyak O.A., Ogorodnikov D.N., 2014 © Design. Tomsk Polytechnic University Publishing House, 2014 2 Introduction. CAD around Us ........................................................................... 5 What is CAD? ................................................................................................ 5 Overview -

Pattern Editor Help
Pattern Editor Help © 2021 Nowarm Software Pattern Editor Help © 2021 Nowarm Software All rights reserved. No parts of this work may be reproduced in any form or by any means - graphic, electronic, or mechanical, including photocopying, recording, taping, or information storage and retrieval systems - without the written permission of the publisher. Products that are referred to in this document may be either trademarks and/or registered trademarks of the respective owners. The publisher and the author make no claim to these trademarks. While every precaution has been taken in the preparation of this document, the publisher and the author assume no responsibility for errors or omissions, or for damages resulting from the use of information contained in this document or from the use of programs and source code that may accompany it. In no event shall the publisher and the author be liable for any loss of profit or any other commercial damage caused or alleged to have been caused directly or indirectly by this document. Printed: May 2021 in (whereever you are located) Contents 3 Table of Contents Foreword 0 Part I Package Overview 8 1 Introdu..c..i.n..g.. .D..i.p..T..r.a..c..e............................................................................................................. 8 2 Form.a..t.s............................................................................................................................... 10 3 DipTr.a..c..e.. .o..n.. .t.h..e.. .W...e..b.......................................................................................................... -

Curriculum Vitae Í Cagrierdem.Net
Çamtepe, 89. Sok. Sandalet Evleri 20/1 Çağrı Erdem 48400, Bodrum Mugla, Turkey B [email protected] Curriculum Vitae Í cagrierdem.net Nationality The Republic of Turkey Languages English Proficient French Intermediate Turkish Native Education 2013–2016 M.Sc., Sonic Arts, Center for Advance Studies in Music (MIAM), İstanbul Technical University (ITU), İstanbul, Turkey 2008–2011 B.Mus., Jazz Composition, Berklee College of Music, Boston, MA, USA Research Interests Digital Music Instruments, Embodied Cognition, Biofeedback, Interaction Design, Wearable Computing, Haptics, Sound Synthesis, Psychoacoustics, Robotics, Alternate Reality, Serious Gaming, Body Area Networks, Music Education, Assistive Technology, Exercise Psychology Technical Skills Hardware Sensor Design, Wearable Electronics, Motor Systems, Printed Circuit Board Design, Studio Patch-bays, Live PA Systems, Audio Systems Programming Max/Msp, Pure Data, C/C++, Python Software Ableton Live, Sibelius 7, Cubase, Logic, Audacity, Sonic Visualizer, Xcode, NetBeans, Processing, Arduino IDE, DipTrace Schematics and PCB Layout Design, Photoshop, Illustrator, LTSPICE, Eagle PCB Design, Fritzing Teaching Experiences 2016-2017 Instructor, Guitar, Ensemble, IELEV Primary School, Istanbul, Turkey 2014-2015 Instructor, Classical Guitar, Istanbul Technical University State Conservatory Pre-school, Istanbul, Turkey 2012-2014 Instructor, Guitar, Ensemble, IELEV Primary School, Istanbul, Turkey Work Experiences 2009-2010 Staff Berklee College of Music Guitar Department, Boston, MA, USA 2006-2008 Production Management Studio Monk, Istanbul, Turkey 2003-Ongoing Freelance Musician Performer, session musician, co-producer, arranger and sound designer. 1/4 Academic Publications 2017 Erdem, Ç., Çamcı, A., & Forbes, A. Biostomp: A Biocontrol System for Embodied Performance Using Mechanomyography. In Proceedings of the International Conference on New Interfaces for Musical Expression, 2017 Invited Talks 2018 Artist Talk, PechaKucha 20x20, at Dublin Cafe, Eskişehir, Turkey 2017 Artist Talk, listen first. -

Diptrace Installation Guide
Recommended system requirements: 1 1 Recommended system requirements: Windows XP / Vista / 7 / 8 / 8.1 / 10 (32, 64-bit); Linux(Wine); Mac OS X (XQuartz X11 required). 1 GHz Pentium III processor or equivalent; 1 Gb RAM 1,5 Gb hard disk space; 1024x768 minimal screen resolution; OpenGL / DirectX 9.0 or higher. 2 Downloads Windows (and Linux) 1) DipTrace Freeware (32 and 64-bit) – does not allow to make projects with more than 2 signal layers and 300 pins, legal for non-profit users only. If you're going to use DipTrace for commercial purposes, you need to purchase it. 2) DipTrace Trial – no limitations on signal layers and number of pins (full-featured 30- day trial). Program will no longer work after the trial period expired. If you already have the license key, you can download either Freeware or Trial, it does not matter, because DipTrace will automatically convert into the corresponding paid version when you enter the license key. MacOS DipTrace 3.0 Mac – freeware MacOS version (for non-profit users only). If you're going to use DipTrace for commercial purposes, you need to purchase it. Notice that all standard component libraries are already included in all installation packages. 3D models are not included. Download the standard set of 3D models from the DipTrace website. 3 Installation guide (Windows) DipTrace is easy-to-use and easy-to-install. Procedures doesn't differ a lot from those for other applications. Step 1: © 2016 Novarm Ltd. 2 DipTrace installation guide Launch downloaded *.exe file (diptrace_en.exe, diptrace_en64.exe, dipfree_en.exe, dipfree_en64.exe). -
PCB Software.Pdf
2017-2022 PCB Software Report on Global and United States Market, Status and Forecast, by Players, Types and Applications 1 Description: This report studies the PCB Software market status and outlook of global and United States, from angles of players, regions, product types and end industries; this report analyzes the top players in global and United States market, and splits the PCB Software market by product type and applications/end industries. The global PCB Software market is valued at XX million USD in 2016 and is expected to reach XX million USD by the end of 2022, growing at a CAGR of XX% between 2016 and 2022. The Asia-Pacific will occupy for more market share in following years, especially in China, also fast growing India and Southeast Asia regions. Browse the full report: http://www.orbisresearch.com/reports/index/2017-2022-pcb-software- report-on-global-and-united-states-market-status-and-forecast-by-players-types-and-applications . North America, especially The United States, will still play an important role which cannot be ignored. Any changes from United States might affect the development trend of PCB Software. United States plays an important role in global market, with market size of xx million USD in 2016 and will be xx million USD in 2022, with a CAGR of XX. Geographically, this report is segmented into several key regions, with sales, revenue, market share (%) and growth Rate (%) of PCB Software in these regions, from 2012 to 2022 (forecast), covering United States North America Europe Asia-Pacific South America Middle East and Africa The major players in global and United States PCB Software market, including Mentor Graphics, Candence, Zuken, Altium., CadSoft, Novarm, Shanghai Tsingyue, Expresspcb, Designspark, KiCad EDA, Autodesk, Eagle, DipTrace, EasyEDA, OrCAD, CircuitMaker, Fritzing, P-CAD,. -
Pocket Tutor, Part 5: PCB Design
Pocket Tutor Build a handheld version Of the Morse Code Tutor Part 5: PCB Design Bruce E. Hall, W8BH As I kid in love with Ham Radio, I always wanted to make my own circuit boards. One day I walked into Radio Shack, bought a bottle of Ferric Chloride solution and resist pen, borrowed my mother’s Pyrex baking dish, and diligently worked on my first printed circuit board masterpiece. Well, my masterpiece didn’t turn out very well. It was under-etched. So was my second attempt. Eventually I made ones that were over-etched. Traces disappeared no matter how dark I inked the lines. I couldn’t get it right. It was messy and imprecise. I gave up. Nowadays, we have free PCB creation software, and access to PCB fabrication houses, that were unimaginable in my youth. Making your own PCB has become easy, precise, and affordable. Several years ago, I decided to give it another shot. If you haven’t tried it yet, you should. PCB software. For the enterprising ham there are several excellent (and free!) applications to choose from. The grand- daddy of them all is Autodesk EAGLE. The full version costs $248/year, but there is a limited version that is free for personal use. Next is KiCad, my personal favorite. Fully open source. If you are starting from scratch and want to learn about creating PCBs, Chris Gammell from Contextual Electronics created a marvelous KiCad tutorial series on YouTube, “Getting to Blinky”. If Chris’ fast-paced 2 hour course is not your style, John’s Basement 32-part KiCad series may be of interest, especially if you use Linux.