Digital Sensors Operate on 3.3V
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Beyond Schematic Capture Meaningful Abstractions for Better Electronics Design Tools
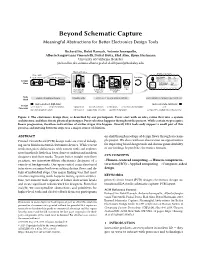
Beyond Schematic Capture Meaningful Abstractions for Better Electronics Design Tools Richard Lin, Rohit Ramesh, Antonio Iannopollo, Alberto Sangiovanni Vincentelli, Prabal Dutta, Elad Alon, Björn Hartmann University of California, Berkeley {richard.lin,rkr,antonio,alberto,prabal,elad,bjoern}@berkeley.edu Physical Device Parts Selection Ideas and ATmega Part Number Size Vf +3.3v Iteration Requirements System Architecture OVLFY3C7 5mm 2 V D0 APG1005SYC-T 0402 2.05 V Button J1 Design Micro- D1 5988140107F 0805 2 V D1 controller - or - ... SW1 Part Number Core LED Flow R1 U1 R2 ATmega32u4 AVR GND Micro- controller LPC1549 ARM CM3 Final FE310-G000 RV32IMAC Hand-built Schematic Prototype PCB Prototypes Capture PCB Tools paper, drawing software breadboards EDA suites: Altium, EAGLE, KiCAD parts libraries, catalogs, spreadsheets Used more abstract, high-level more concrete, low-level Design user stories implementation exploration documentation verification cost, manufacturability cost Concerns functional specification verification supporting circuitry system integration component availability and sourcing Figure 1: The electronics design flow, as described by our participants. Users start with an idea, refine that intoasystem architecture, and then iterate physical prototypes. Parts selection happens throughout the process. While certain steps require linear progression, iteration and revision of earlier stages also happen. Overall, EDA tools only support a small part of this process, and moving between steps was a major source of friction. ABSTRACT on clickthrough mockups of design flows through an exam- Printed Circuit Board (PCB) design tools are critical in help- ple project. We close with our observation on opportunities ing users build non-trivial electronics devices. While recent for improving board design tools and discuss generalizability work recognizes deficiencies with current tools and explores of our findings beyond the electronics domain. -

Reluctant Recruits the US Military and the War on Drugs Peter Zirnite WOLA (Washington Office on Latin America), Washington DC, August 1997
Reluctant Recruits The US Military and the War on Drugs Peter Zirnite WOLA (Washington Office on Latin America), Washington DC, August 1997 CONTENTS • Executive Summary • I. Introduction • I. Calling in the Marines • II. Congress Beats the War Drum • III. Metamorphosis of a Mission • IV. Aiding Latin American Security Forces • Chart 1: US Antinarcotics Assistance, World Distribution • Chart 2: US Antinarcotics Assistance, 1988-1998 • V. Training Latin American Security Forces • Table 1: US Active Duty Personnel in Latin America • VI. Controversy on Capitoll Hill • VII. Detection and Monitoring: The Pentagon's Meat and Potatoes • VIII. Source Country Shift • Table 2: DOD Counternarcotics Spending, FY 1989-1998 • IX. Attacking the "Air Bridge" • X. Domestic Duty? • Table 3: Dept. of Defense Counter-drug Program Operating Tempo • XI. Looking to the Future • XII. Conclusion • A Policy Doomed to Failure • The Negative Consequences • What the Future Holds • Appendix A: The Pentagon's Drug Warriors • Southern Command • Atlantic Command • Pacific Command • Special Operations Command • North American Aerospace Defense Command • Appendix B: US Antinarcotics Assistance 1986-1996 • References Executive Summary Despite the end of the Cold War and recent transitions toward more democratic societies in Latin America, the United States has launched a number of initiatives that strengthen the power of Latin American security forces, increase the resources available to them, and expand their role within society - precisely when struggling civilian elected governments are striving to keep those forces in check. Rather than encourage Latin American militaries to limit their role to the defense of national borders, Washington has provided the training, resources and doctrinal justification for militaries to move into the business of building roads and schools, providing veterinary and child inoculation services, and protecting the environment. -

Evaluation of ARM Tethered Balloon System Instrumentation For
Atmos. Meas. Tech. Discuss., https://doi.org/10.5194/amt-2019-117 Manuscript under review for journal Atmos. Meas. Tech. Discussion started: 7 May 2019 c Author(s) 2019. CC BY 4.0 License. Evaluation of ARM Tethered Balloon System instrumentation for supercooled liquid water and distributed temperature sensing in mixed-phase Arctic clouds Darielle Dexheimer1, Martin Airey2, Erika Roesler1, Casey Longbottom1, Keri Nicoll2,5, Stefan Kneifel3, Fan Mei4, R. Giles Harrison2, Graeme Marlton2, Paul D. Williams2 5 1Sandia National Laboratories, Albuquerque, New Mexico, USA 2University of Reading, Dept. of Meteorology, Reading, UK 3University of Cologne, Institute for Geophysics and Meteorology, Cologne, Germany 4Pacific Northwest National Laboratory, Richland, Washington, USA 5University of Bath, Dept. of Electronic and Electrical Engineering, Bath, UK 10 Correspondence to: Darielle Dexheimer ([email protected]) Abstract. A tethered balloon system (TBS) has been developed and is being operated by Sandia National Laboratories (SNL) on behalf of the U.S. Department of Energy’s (DOE) Atmospheric Radiation Measurement (ARM) User Facility in order to collect in situ atmospheric measurements within mixed-phase Arctic clouds. Periodic tethered balloon flights have been 15 conducted since 2015 within restricted airspace at ARM’s Advanced Mobile Facility 3 (AMF3) in Oliktok Point, Alaska, as part of the AALCO (Aerial Assessment of Liquid in Clouds at Oliktok), ERASMUS (Evaluation of Routine Atmospheric Sounding Measurements using Unmanned Systems), and POPEYE (Profiling at Oliktok Point to Enhance YOPP Experiments) field campaigns. The tethered balloon system uses helium-filled 34 m3 helikites and 79 and 104 m3 aerostats to suspend instrumentation that is used to measure aerosol particle size distributions, temperature, horizontal wind, pressure, relative 20 humidity, turbulence, and cloud particle properties and to calibrate ground-based remote sensing instruments. -

Aviation in 1908
AA CulturalCultural ShockShock inin AviationAviation DevelopmentDevelopment aa presentationpresentation forfor thethe RAeSRAeS,, HamburgHamburg BranchBranch MarchMarch 26th,26th, 20092009 by Claudius La Burthe Hamburg University of Applied Sciences Download from http://hamburg.dglr.de Foreword y When I was asked to present this lecture, I thought it was an easy task, because I have some documentation at home. y It was a BIG MISTAKE ! y Getting into books, I found lots of discrepancies due to: errors, lack of exactness, factual dishonesty, etc… y But the most intriguing is the lack of technical expertise shown by most historians TheTransferofKnowledge y To understand the background of 1908, one has to trace how scientific and technical knowledge about aviation was transmitted y History proves that aviation is so fascinating that, well before the Internet, smallest event were widely reported y As early as 18th and 19th century, scientific communities of all developed countries were in very close contact and exchanged lots of information My ambition: to show 1. A chronological list of events 2. Technical analysis of individual failures or successes 3. An attempt to trace the transmission of knowledge 4. No try: who invented what? 5. A technical Conclusion Aerostats as Precursors of Precursors y 21/11/1783 first registered human flight with hot air balloon (gas- 10 days later) – Paris y Balloon activity rapidly growing throughout Europe for ~three years y 1793 first military use of a tethered balloon during the siege of Mainz y 1797 first parachute jump by Garnerin – Paris y 1803 Robertson & Lhoest reach 7280 m altitude over Hamburg y 1830+ and civil war: american balloonists flew. -

Dear Education Professional;
Dear Education Professional; Attached is a series of lesson plans that have been put together so that you will have material to enhance the hot air balloon presentation. Most of the plans are designed for use after the visit, but several can be used before hand to create interest and excitement. Feel free to photocopy any or all of the plans as you see fit. Your are encouraged you to use them in any manner you want to, expanding, editing, modifying and deleting as necessary to suit your particular classroom needs and the age of the children. Have fun! RESOURCE SHEET Student pilots can begin hot air balloon training at age 14 and test for their private license at age 16. A student pilot must receive at least 10 hours of flight instruction. Certain altitude, duration and soloing requirements must be documented in a log book. Then, a written, verbal and actual flight test must be passed in order to get a license. Additional experience and testing must be completed to secure a commercial license whereby the pilot can sell rides. HOT AIR BALLOONS by Donna S. Pfautsch (Trillium Press 1993) An excellent 75 pg. book of definitions, lesson plans, experiments and resources. Hot Air Ballooning Coloring Book by Steve Zipp (Specialty Publishing Co, 1982) Great for coloring ideas for primary students. A few of my favorite books that travel with me and I put on display during presentations: Hot Air Henry by Mary Calhoun (many school libraries have this) Ballooning by Dick Wirth and Jerry Young Mr. Mombo’s Balloon Flight by Stephen Holmes Smithsonian Book of Flight for Young People by Walter J Boyne The Great Valentine’s Day Balloon Race by Adrienne Adams How to Fly a 747 by Ian Graham (a very cool book for kids!) Research Balloons by Carole Briggs Hot Air Ballooning by Terrell Publishing, Inc. -

Metadefender Core V4.17.3
MetaDefender Core v4.17.3 © 2020 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of MetaDefender Core 14 1. Quick Start with MetaDefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Process Files with MetaDefender Core 21 2. Installing or Upgrading MetaDefender Core 22 2.1. Recommended System Configuration 22 Microsoft Windows Deployments 22 Unix Based Deployments 24 Data Retention 26 Custom Engines 27 Browser Requirements for the Metadefender Core Management Console 27 2.2. Installing MetaDefender 27 Installation 27 Installation notes 27 2.2.1. Installing Metadefender Core using command line 28 2.2.2. Installing Metadefender Core using the Install Wizard 31 2.3. Upgrading MetaDefender Core 31 Upgrading from MetaDefender Core 3.x 31 Upgrading from MetaDefender Core 4.x 31 2.4. MetaDefender Core Licensing 32 2.4.1. Activating Metadefender Licenses 32 2.4.2. Checking Your Metadefender Core License 37 2.5. Performance and Load Estimation 38 What to know before reading the results: Some factors that affect performance 38 How test results are calculated 39 Test Reports 39 Performance Report - Multi-Scanning On Linux 39 Performance Report - Multi-Scanning On Windows 43 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. -

Dynamics and Control of a Multi-Tethered Aerostat Positioning System
Dynamics and Control of a Multi-Tethered Aerostat Positioning System by Casey Lambert Department of Mechanical Engineering McGill University, Montreal Canada October 2006 A thesis submitted to McGill University in partial fulfillment of the requirements of the degree of Doctor of Philosophy © Casey Lambert, 2006 Library and Bibliothèque et 1+1 Archives Canada Archives Canada Published Heritage Direction du Branch Patrimoine de l'édition 395 Wellington Street 395, rue Wellington Ottawa ON K1A ON4 Ottawa ON K1A ON4 Canada Canada Your file Votre référence ISBN: 978-0-494-32203-1 Our file Notre référence ISBN: 978-0-494-32203-1 NOTICE: AVIS: The author has granted a non L'auteur a accordé une licence non exclusive exclusive license allowing Library permettant à la Bibliothèque et Archives and Archives Canada to reproduce, Canada de reproduire, publier, archiver, publish, archive, preserve, conserve, sauvegarder, conserver, transmettre au public communicate to the public by par télécommunication ou par l'Internet, prêter, telecommunication or on the Internet, distribuer et vendre des thèses partout dans loan, distribute and sell th es es le monde, à des fins commerciales ou autres, worldwide, for commercial or non sur support microforme, papier, électronique commercial purposes, in microform, et/ou autres formats. paper, electronic and/or any other formats. The author retains copyright L'auteur conserve la propriété du droit d'auteur ownership and moral rights in et des droits moraux qui protège cette thèse. this thesis. Neither the thesis Ni la thèse ni des extraits substantiels de nor substantial extracts from it celle-ci ne doivent être imprimés ou autrement may be printed or otherwise reproduits sans son autorisation. -

Tethered Balloons, Airships, Free Balloons and Kites) Order, 1999 2
STATUTORY INSTRUMENT S.I. No. 422 of 1999 IRISH AVIATION AUTHORITY (TETHERED BALLOONS, AIRSHIPS, FREE BALLOONS AND KITES) ORDER, 1999 2 IRISH AVIATION AUTHORITY (TETHERED BALLOONS, AIRSHIPS, FREE BALLOONS AND KITES) ORDER, 1999 The Irish Aviation Authority, in exercise of the powers conferred on it by sections 5, 58 and 60 of the Irish Aviation Authority Act, 1993 (No. 29 of 1993) as amended by the Air Navigation and Transport (Amendment) Act, 1998 (No. 24 of 1998), hereby orders as follows: - 1. Applicability (1) This Order shall apply, unless otherwise specified herein, to a tethered or captive balloon of which any linear dimension exceeds 2 metres or the gas capacity of which exceeds 3.25 cubic metres, to a small balloon not exceeding 2 metres in any linear dimension including any attached equipment at any stage in its flight, to an airship and to any kite. (2) This Order shall come into operation on the date of its publication in the Iris Oifigiuil. 2. Definitions “aerodrome traffic zone” means an airspace of dimensions defined by the Authority and established around an aerodrome for the protection of aerodrome traffic; “the Authority” means the Irish Aviation Authority; “captive balloon” means a balloon which when in flight is attached by a restraining device to the ground; “captive flight” means flight by an uncontrollable balloon during which it is attached to the ground by a restraining device; “tethered flight” means a flight by a controllable balloon throughout which it is flown within limits imposed by a restraining device which attaches the balloon to the surface. -

PCB CAD / EDA Software and Where to Get It……
Useful engineering information from Sphere Research Corporation By: walter shawlee 2 PCB CAD / EDA Software and where to get it…… Fortunately for cash-strapped engineering students, most commercial packages have demo versions of the real software, or are completely free open source software. Keep in mind, the critical issue is the WORK , not the TOOL . If you understand the ideas, you can learn any package, although each tool has its own internal capabilities, issues and quirks to master. Here are some of the major paid packages in use today: Altium Designer from Altium, see: http://www.altium.com/en/products/downloads Evaluate: http://www.altium.com/free-trial Also, they own the legacy apps, P-cad , Protel and Easytrax , see them here: http://techdocs.altium.com/display/ALEG/Legacy+Downloads OrCAD from Cadence, see: http://www.orcad.com/ Evaluate: http://www.orcad.com/buy/try-orcad-for-free Eagle from CadSoft, see: http://www.cadsoftusa.com/eagle-pcb-design-software/about-eagle/ Evaluate (freeware version): http://www.cadsoftusa.com/download-eagle/freeware/ Pads from Mentor Graphics, see: http://www.mentor.com/pcb/pads/ Evaluate: http://www.pads.com/try.html?pid=mentor Here are key Open-Source Free PCB CAD packages: KiCad , see: http://www.kicad- pcb.org/display/KICAD/KiCad+EDA+Software+Suite key packages: Eeschema, PCBnew, Gerbview Works on all platforms. DESIGNSPARK , see: http://www.rs-online.com/designspark/electronics/ They also have a free mechanical design package. Linux operation using WINE and Mac operation using Crossover or Play On Mac is noted as possible, but not directly supported. -

A-NSE Airships and Aerostats Peter Lobner, 3 April 2021 1. Introduction
A-NSE airships and aerostats Peter Lobner, 3 April 2021 1. Introduction Aero-Nautic Services & Engineering (A-NSE) was founded in 2011 and is based in Le Castellet, France. It offers customers a wide range of airborne surveillance systems based on unmanned aerostats (moored balloons) and manned airships. The airships are designed to carry out surveillance missions effectively, at lower operating cost and over considerably longer range than fixed-wing aircraft and helicopters. The aerostats and airships can be configured to conduct a range of missions with equipment such as a radar, an electro-optical / infrared (EO/IR) system, an automatic identification system (AIS), or electronic warfare devices. The company’s website is here: http://www.a-nse.com 2. Variable volume, variable buoyancy lifting gas envelope A-NSE’s larger aerostats and airships have a characteristic variable volume, and hence, variable buoyancy, three-lobe gas envelope, similar in design to the Voliris 901-series airships. Computational fluid dynamics (CFD) model of a tri-lobe hull. Source: A-NSE 1 This unusual feature allows the envelope’s volume and shape to be altered in flight to adapt to the flying conditions. For example, one shape is better suited to hovering (i.e., high buoyancy), whereas other shapes are better suited for different flight modes where there will be varying degrees of aerodynamic lift (i.e., takeoff, cruise, approach and landing). The system can change envelope volume by 14% and aerostatic lift by 150%. This system also offers the possibility of reducing the height of the airship’s envelope, and therefore the required hangar height, by 30%. -

Diptrace Tutorial
Introduction DipTrace Tutorial allows the reader to get started by designing a simple schematic and its PCB, we will also design a component and practice with more advanced features. This step-by-step tutorial is intended for gradual reading starting from the beginning, with more simple topics at the top and more complex (where we assume that you already know the basics) at the bottom. For a quick answer, please refer to the corresponding Help document ("Help \ <DipTrace module> Help" from the main menu). Created for DipTrace version 3.0 (June 14, 2016). Contents 3 Table of Contents Part I: Creating a simple schematic 5 1 Schem.a..t.i.c.. .U..I......................................................................................................................... 6 Schematic mai.n.. .w...i.n...d..o..w.... ....................................................................................................................................... 6 Custom keybo.a..r..d.. .h..o...t.k..e...y..s.. ................................................................................................................................... 7 2 Establi.s.h..i.n..g.. .s..c.h..e..m...a..t.i.c.. .s..i.z.e.. .a..n..d.. .p..l.a..c..i.n..g.. .t.i.t.l.e..s....................................................................... 8 3 Config..u..r.i.n..g.. .l.i.b..r..a..r.i.e..s............................................................................................................ 11 4 Desig.n..i.n..g.. .a.. .s.c..h..e..m...a..t.i.c........................................................................................................ -

Preparation of Papers for AIAA Journals
NASA’s Learn-to-Fly Project Overview Eugene H. D. Heim*, Erik M. Viken†, Jay M. Brandon‡, and Mark A. Croom§ NASA Langley Research Center, Hampton, VA, 23681-2199, United States Learn-to-Fly (L2F) is an advanced technology development effort aimed at assessing the feasibility of real-time, self-learning flight vehicles. Specifically, research has been conducted on merging real-time aerodynamic modeling, learning adaptive control, and other disciplines with the goal of using this “learn to fly” methodology to replace the current iterative vehicle development paradigm, substantially reducing the typical ground and flight testing requirements for air vehicle design. Recent activities included an aggressive flight test program with unique fully autonomous fight test vehicles to rapidly advance L2F technology. This paper presents an overview of the project and key components. I. Nomenclature ARF = almost ready to fly CAS = Convergent Aeronautics Solutions CFD = Computational Fluid Dynamics Cmα = non-dimensional pitch static stability with angle of attack, per deg FTS = flight termination system GP = Generalized Pilot GPS = Global Positioning System IMU = inertial measurement unit kα = angle of attack control gain L2F = Learn-to-Fly L/D = aerodynamic lift to drag ratio MOF = multivariate orthogonal functions PTIs = Programmed Test Inputs R/C = radio control TACP = Transformative Aeronautics Concepts Program UAS = unmanned aircraft system II. Introduction “Learn-to-Fly” approach is being developed by NASA within the Transformative Aeronautics Concepts A Program (TACP) with a goal of changing the paradigm of aircraft development. The conventional process of aircraft development includes a sequential, iterative process of model development from wind tunnel tests and CFD, simulation development, control law development, and finally flight test.