Analog Digital Conversion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Clock Jitter Effects on the Performance of ADC Devices
Clock Jitter Effects on the Performance of ADC Devices Roberto J. Vega Luis Geraldo P. Meloni Universidade Estadual de Campinas - UNICAMP Universidade Estadual de Campinas - UNICAMP P.O. Box 05 - 13083-852 P.O. Box 05 - 13083-852 Campinas - SP - Brazil Campinas - SP - Brazil [email protected] [email protected] Karlo G. Lenzi Centro de Pesquisa e Desenvolvimento em Telecomunicac¸oes˜ - CPqD P.O. Box 05 - 13083-852 Campinas - SP - Brazil [email protected] Abstract— This paper aims to demonstrate the effect of jitter power near the full scale of the ADC, the noise power is on the performance of Analog-to-digital converters and how computed by all FFT bins except the DC bin value (it is it degrades the quality of the signal being sampled. If not common to exclude up to 8 bins after the DC zero-bin to carefully controlled, jitter effects on data acquisition may severely impacted the outcome of the sampling process. This analysis avoid any spectral leakage of the DC component). is of great importance for applications that demands a very This measure includes the effect of all types of noise, the good signal to noise ratio, such as high-performance wireless distortion and harmonics introduced by the converter. The rms standards, such as DTV, WiMAX and LTE. error is given by (1), as defined by IEEE standard [5], where Index Terms— ADC Performance, Jitter, Phase Noise, SNR. J is an exact integer multiple of fs=N: I. INTRODUCTION 1 s X = jX(k)j2 (1) With the advance of the technology and the migration of the rms N signal processing from analog to digital, the use of analog-to- k6=0;J;N−J digital converters (ADC) became essential. -

Effective Bits
Application Note Effective Bits Effective Bits Testing Evaluates Dynamic Performance of Digitizing Instruments The Effective Bits Concept desired time resolution, run the digitizer at the requisite Whether you are designing or buying a digitizing sys- sampling rate. Those are simple enough answers. tem, you need some means of determining actual, Unfortunately, they can be quite misleading, too. real-life digitizing performance. How closely does the While an “8-bit digitizer” might provide close to eight output of any given analog-to-digital converter (ADC), bits of accuracy and resolution on DC or slowly waveform digitizer or digital storage oscilloscope changing signals, that will not be the case for higher actually follow any given analog input signal? speed signals. Depending on the digitizing technology At the most basic level, digitizing performance would used and other system factors, dynamic digitizing seem to be a simple matter of resolution. For the performance can drop markedly as signal speeds desired amplitude resolution, pick a digitizer with the increase. An 8-bit digitizer can drop to 6-bit, 4-bit, requisite number of “bits” (quantizing levels). For the or even fewer effective bits of performance well before reaching its specified bandwidth. Effective Bits Application Note Figure 1. When comparing digitizer performance, testing the full frequency range is important. If you are designing an ADC device, a digitizing instru- components. Thus, it may be necessary to do an ment, or a test system, it is important to understand the effective bits evaluation for purposes of comparison. If various factors affecting digitizing performance and to equipment is to be combined into a system, an effective have some means of overall performance evaluation. -

Noise-Shaping Sar Adcs
NOISE-SHAPING SAR ADCS by Jeffrey Alan Fredenburg A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Electrical Engineering) in the University of Michigan 2015 Committee: Professor Michael P. Flynn, Chair Professor Zhong He Professor Dave D. Wentzloff Professor Zhengya Zhang “Nobody tells this to people who are beginners; I wish someone told me. All of us who do creative work, we get into it because we have good taste. But there is this gap. For the first couple years you make stuff; it’s just not that good. It’s trying to be good, it has potential, but it’s not. But your taste, the thing that got you into the game, is still killer. And your taste is why your work disappoints you. A lot of people never get past this phase. They quit. Most people I know who do interesting, creative work went through years of this. We know our work doesn’t have this special thing that we want it to have. We all go through this. And if you are just starting out or you are still in this phase, you gotta know it's normal and the most important thing you can do is do a lot of work. Put yourself on a deadline so that every week you will finish one story. It is only by going through a volume of work that you will close that gap and your work will be as good as your ambitions. And I took longer to figure out how to do this than anyone I’ve ever met. -
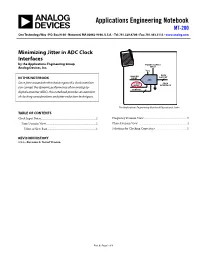
MT-200: Minimizing Jitter in ADC Clock Interfaces
Applications Engineering Notebook MT-200 One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com Minimizing Jitter in ADC Clock Interfaces by the Applications Engineering Group POWER SUPPLY Analog Devices, Inc. INPUT V REF DATA ANALOG OUTPUT IN THIS NOTEBOOK INPUT ADC Since jitter around the threshold region of a clock interface CLOCK FPGA INTERFACE can corrupt the dynamic performance of an analog-to- INPUT CONTROL digital converter (ADC), this notebook provides an overview of clocking considerations and jitter-reduction techniques. The Applications Engineering Notebook Educational Series TABLE OF CONTENTS Clock Input Noise.............................................................................. 2 Frequency Domain View ............................................................. 3 Time Domain View ....................................................................... 2 Phase Domain View ..................................................................... 4 Effect of Slew Rate..................................................................... 3 Solutions for Clocking Converters ............................................. 5 REVISION HISTORY 1/12—Revision 0: Initial Version Rev. 0 | Page 1 of 8 MT-200 Applications Engineering Notebook CLOCK INPUT NOISE Jitter around the threshold region of the clock interface can TIME DOMAIN VIEW corrupt the timing of an analog-to-digital converter (ADC). For example, jitter can cause the ADC to capture a sample at the wrong time, resulting in false sampling of the analog input and reducing the signal to noise (SNR) ratio of the device. A reduction in jitter can be achieved in a number of different ways, including improving the clock source, filtering, frequency division, and clock circuit hardware. This document provides dV suggestions on how to improve the clock system to achieve the best possible performance from an ADC. Noise in the circuit between the clock and ADC is the root ERROR VOLTAGE cause of clock jitter. -

An95091 Application Note Understanding Effective Bits
AN95091 APPLICATION NOTE UNDERSTANDING EFFECTIVE BITS Tony Girard, Signatec, Design and Applications Engineer INTRODUCTION One criteria often used to evaluate an Analog to Digital Converter (ADC) or data acquisition system is the effective number of bits achieved. The effective number of bits provides a means to evaluate the overall performance of a system. However, like any other parameter, an understanding of the theory behind the effective bits, and different methods used to determine effective bits is necessary to properly compare components and systems. The intent of this application note is to provide the basic theory behind effective bits, describe different methods used to determine effective bits, and to explain the limitations in its usage. NUMBER OF BITS VERSES EFFECTIVE BITS The number of bits in a data acquisition system is normally specified as the number of bits of the digitizer. Any data acquisition system, or ADC, has inherent performance limitations. When evaluating an acquisition system the effective number of bits provided by the system can useful in determining if the system is right for the application. There are many sources of error in an acquisition system. Considering a system in terms of effective bits, all error sources are included. Evaluation of system performance is made without the need to consider the individual error sources, all of which may not be characterized by the manufacturer. THE PERFECT SYSTEM A perfect data acquisition system is one in which the captured analog signal is free from noise and distortion. The system is free from any frequency dependent performance characteristics, up to the maximum sampling rate and the bandwidth limit of the system. -

Understanding Noise, ENOB, and Effective Resolution in Analog-To-Digital Converters
Maxim > Design Support > Technical Documents > Application Notes > A/D and D/A Conversion/Sampling Circuits > APP 5384 Keywords: noise, ENOB, ADC, analog-to-digital converters, effective resolution, factory automation, temp sensing, data acquisition, delta-sigma, sigma-delta, SNR, NFR APPLICATION NOTE 5384 Understanding Noise, ENOB, and Effective Resolution in Analog-to-Digital Converters May 07, 2012 Abstract: Specifications such as noise, effective number of bits (ENOB), effective resolution, and noise- free resolution in large part define how accurate an ADC really is. Consequently, understanding the performance metrics related to noise is one of the most difficult aspects of transitioning from a SAR to a delta-sigma ADC. With the current demand for higher resolution, designers must develop a better understanding of ADC noise, ENOB, effective resolution, and signal-to-noise ratio (SNR). This application note helps that understanding. A similar version of this article was published in Planet Analog on September 16, 2011. One of the major trends for ADCs is the move toward higher resolution. The trend impacts a wide range of applications, including factory automation, temperature sensing, and data acquisition. The need for higher resolution is leading designers from traditional 12-bit successive approximation register (SAR) ADCs to delta-sigma ADCs with resolutions that reach 24 bits. All ADCs have a certain amount of noise. That includes both input-referred noise, which is inherent to the ADC, and quantization noise, which is the noise generated while the ADC is converting. Specifications such as noise, effective number of bits (ENOB), effective resolution, and noise-free resolution in large part define how accurate an ADC really is. -

Proquest Dissertations
u Ottawa I.'I 'nr.i-i-ili' r;iii,iiliriiMr I '.iii.iihi's iini'.i'i illy ITTTT FACULTE DES ETUDES SUPERIEURES ^==1 FACULTY OF GRADUATE AND ET POSTOCTORALES U Ottawa POSDOCTORAL STUDIES L'UmversitcS eanadienne Canada's university Amine Kharrat AUTEUR DE LA THESE / AUTHOR OF THESIS M.Sc. (Systems Science) GRADE/DEGREE System Science FACULTE, ECOLE, DEPARTEMENT / FACULTY, SCHOOL, DEPARTMENT A Floating-point Analog-to-Digital Architecture for a Wide Range-Dynamic Acquisition System TITRE DE LA THESE / TITLE OF THESIS Voicu Groza DIRECTEUR (DIRECTRICE) DE LA THESE / THESIS SUPERVISOR CO-DIRECTEUR (CO-DIRECTRICE) DE LA THESE / THESIS CO-SUPERVISOR EXAMINATEURS (EXAMINATRICES) DE LA THESE/THESIS EXAMINERS Emil Petriu Tet Yeap Gary W. Slater Le Doyen de la Faculte des etudes superieures et postdoctorales / Dean of the Faculty of Graduate and Postdoctoral Studies A Floating-Point Analog-to-Digital Architecture for a Wide Range-Dynamic Acquisition System By Amine Kharrat A Thesis Presented to School of Graduate Studies and Research In partial fulfillment of the Requirements for the degree of Master of Science Master program in Systems Science University of Ottawa Ottawa, Ontario, Canada, 2009 Copyright © 2009 Amine Kharrat Library and Archives Bibliotheque et 1*1 Canada Archives Canada Published Heritage Direction du Branch Patrimoine de I'edition 395 Wellington Street 395, rue Wellington OttawaONK1A0N4 OttawaONK1A0N4 Canada Canada Your file Votre reference ISBN: 978-0-494-61147-0 Our We Notre reference ISBN: 978-0-494-61147-0 NOTICE: AVIS: The -

Understanding Key Parameters for RF-Sampling Data Converters
White Paper: Zynq UltraScale+ RFSoCs WP509 (v1.0) February 20, 2019 Understanding Key Parameters for RF-Sampling Data Converters Xilinx® Zynq® UltraScale+™ RFSoCs provide a single device RF-to-output platform for the most demanding applications. Updated performance metrics more accurately present the direct-sampling RF capabilities of these devices. ABSTRACT In direct-sampling RF designs, data converters are typically characterized by the NSD, IM3, and ACLR parameters rather than by traditional metrics like SNR and ENOB. In software-defined radio and similar narrow-band use cases, it is more important to quantify the amount of data-converter noise falling into the band(s) of interest; legacy data conversion metrics are ill-suited to do this. This white paper first presents the mathematical relationships underlying traditional ADC parameters—SFDR, SNR, SNDR (SINAD), and ENOB—and illustrates why these metrics provide good characterization of data converters in wide-band applications such as superheterodyne receivers. It then delineates why these metrics are inappropriate for data converters that do not function over their full Nyquist bandwidth, as in direct RF sampling applications like SDR. Derivation and measurement of NSD, IM3, and ACLR are described in detail, including use of the Xilinx RF Data Converter Evaluation Tool in the measurement of RF data conversion parameters. © Copyright 2019 Xilinx, Inc. Xilinx, the Xilinx logo, Alveo, Artix, ISE, Kintex, Spartan, Versal, Virtex, Vivado, Zynq, and other designated brands included herein are trademarks of Xilinx in the United States and other countries. All other trademarks are the property of their respective owners. WP509 (v1.0) February 20, 2019 www.xilinx.com 1 Understanding Key Parameters for RF-Sampling Data Converters Introduction Analog data converters based on vacuum-tube technology were developed during World War II for message encryption systems. -
Practical Guidelines for Constructing Accurate Acoustical Spaces Including Advice on the Proper Materials to Use
Auralex® Acoustics, Inc. Practical Guidelines For Constructing Accurate Acoustical Spaces Including Advice On The Proper Materials To Use by Eric T. Smith Edited by Jeff D. Szymanski, PE July 2004 Version 3.0 Published & © Copyright 1993, 2004 by Auralex® Acoustics, Inc. 6853 Hillsdale Court, Indianapolis IN USA 46250-2039 • www.auralex.com FOREWORD.........................................................................................................................................4 WELCOME........................................................................................................................................4 CHAPTER 1..........................................................................................................................................6 BASICS OF ACOUSTICS.................................................................................................................6 ACOUSTICAL DEFINITIONS ...........................................................................................................7 Acoustics 101 Definitions ...........................................................................................................7 GENERAL TECHNICAL INFORMATION.........................................................................................9 STC................................................................................................................................................9 Absorption Coefficients and NRC ............................................................................................12 -

Neural Network-Inspired Analog-To-Digital Conversion to Achieve Super-Resolution with Low-Precision RRAM Devices
Neural Network-Inspired Analog-to-Digital Conversion to Achieve Super-Resolution with Low-Precision RRAM Devices Weidong Cao*, Liu Ke*, Ayan Chakrabarti** and Xuan Zhang* * Department of ESE, ** Department of CSE, Washington University, St.louis, MO, USA Abstract— Recent works propose neural network- (NN-) NN operations, and can be trained to approximate the spe- inspired analog-to-digital converters (NNADCs) and demon- cific quantization=conversion functions required by different strate their great potentials in many emerging applications. systems. However, a major challenge for designing such These NNADCs often rely on resistive random-access memory (RRAM) devices to realize the NN operations and require NNADCs is the limited conductance=resistance resolution high-precision RRAM cells (6∼12-bit) to achieve a moderate of RRAM devices. Although these NNADCs optimistically quantization resolution (4∼8-bit). Such optimistic assumption assume that each RRAM cell can be precisely programmed of RRAM resolution, however, is not supported by fabrication with 6∼12-bit resolution, measured data from realistic fab- data of RRAM arrays in large-scale production process. In this rication process suggest the actual RRAM resolution tends paper, we propose an NN-inspired super-resolution ADC based on low-precision RRAM devices by taking the advantage of to be much lower (2∼4-bit) [8], [9]. Therefore, there exists a co-design methodology that combines a pipelined hardware a gap between the reality and the assumption of RRAM architecture with a custom NN training framework. Results precision, yet lacks a design methodology to build super- obtained from SPICE simulations demonstrate that our method resolution NNADCs from low-precision RRAM devices. -

Characterization and Correction of Analog-To-Digital Converters
Characterization and Correction of Analog-to-Digital Converters HENRIK F. LUNDIN Doctoral Thesis Stockholm, Sweden 2005 TRITA–S3–SB-0575 ISSN 1103-8039 KTH School of Electrical Engineering ISRN KTH/SB/R--05/75--SE SE-100 44 Stockholm ISBN 91-7178-210-9 SWEDEN Akademisk avhandling som med tillstånd av Kungl Tekniska högskolan framlägges till offentlig granskning för avläggande av teknologie doktorsexamen i signalbehand- ling fredagen den 16 december 2005 klockan 13.00 i D3, Kungl Tekniska högskolan, Lindstedtsvägen 5, Stockholm. c Henrik Fahlberg Lundin, november 2005 Tryck: Universitetsservice US AB iii Abstract Analog-to-digital conversion and quantization constitute the topic of this thesis. Post- correction of analog-to-digital converters (ADCs) is considered in particular. ADCs usu- ally exhibit non-ideal behavior in practice. These non-idealities spawn distortions in the converters output. Whenever the errors are systematic, it is possible to mitigate them by mapping the output into a corrected value. The work herein is focused on problems associated with post-correction using look-up tables. All results presented are supported by experiments or simulations. The first problem considered is characterization of the ADC. This is in fact an esti- mation problem, where the transfer function of the converter should be determined. This thesis deals with estimation of quantization region midpoints, aided by a reference signal. A novel estimator based on order statistics is proposed, and is shown to have superior performance compared with the sample mean traditionally used. The second major area deals with predicting the performance of an ADC after post- correction. A converter with static differential nonlinearities and random input noise is considered. -

A 0.7-V 0.6-Μw 100-Ks/S Low-Power SAR ADC with Statistical
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination. IEEE JOURNAL OF SOLID-STATE CIRCUITS 1 A 0.7-V 0.6-μW 100-kS/s Low-Power SAR ADC With Statistical Estimation-Based Noise Reduction Long Chen, Student Member, IEEE, Xiyuan Tang, Arindam Sanyal, Student Member, IEEE, Yeonam Yoon, Jie Cong, and Nan Sun, Senior Member, IEEE Abstract— This paper presents a power-efficient noise reduc- for a high-resolution SAR ADC is its exponentially growing tion technique for successive approximation register analog-to- capacitive DAC size and power. Facing these challenges, digital converters (ADCs) based on the statistical estimation it is highly desirable to develop a more efficient way to theory. It suppresses both comparator noise and quantization error by accurately estimating the ADC conversion residue. increase SAR ADC resolution without significantly increasing It allows a high signal-to-noise ratio (SNR) to be achieved with the comparator power and the DAC size. a noisy low-power comparator and a relatively low resolution There are prior works that can reduce the comparator power digital-to-analog converter (DAC). The proposed technique has and noise. The technique of [6] arranges two comparators low hardware complexity, requiring no change to the standard with different noise and power levels. Its limitation is that ADC operation except for repeating the least significant bit (LSB) comparisons. Three estimation schemes are studied and the the offsets of the two comparators need to be tightly matched, optimal Bayes estimator is chosen for a prototype 11-b ADC which is nontrivial at high resolution.