MT-003:Understand SINAD, ENOB, SNR, THD, THD + N, and SFDR So You Don't Get Lost in the Noise Floor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Laser Linewidth, Frequency Noise and Measurement
Laser Linewidth, Frequency Noise and Measurement WHITEPAPER | MARCH 2021 OPTICAL SENSING Yihong Chen, Hank Blauvelt EMCORE Corporation, Alhambra, CA, USA LASER LINEWIDTH AND FREQUENCY NOISE Frequency Noise Power Spectrum Density SPECTRUM DENSITY Frequency noise power spectrum density reveals detailed information about phase noise of a laser, which is the root Single Frequency Laser and Frequency (phase) cause of laser spectral broadening. In principle, laser line Noise shape can be constructed from frequency noise power Ideally, a single frequency laser operates at single spectrum density although in most cases it can only be frequency with zero linewidth. In a real world, however, a done numerically. Laser linewidth can be extracted. laser has a finite linewidth because of phase fluctuation, Correlation between laser line shape and which causes instantaneous frequency shifted away from frequency noise power spectrum density (ref the central frequency: δν(t) = (1/2π) dφ/dt. [1]) Linewidth Laser linewidth is an important parameter for characterizing the purity of wavelength (frequency) and coherence of a Graphic (Heading 4-Subhead Black) light source. Typically, laser linewidth is defined as Full Width at Half-Maximum (FWHM), or 3 dB bandwidth (SEE FIGURE 1) Direct optical spectrum measurements using a grating Equation (1) is difficult to calculate, but a based optical spectrum analyzer can only measure the simpler expression gives a good approximation laser line shape with resolution down to ~pm range, which (ref [2]) corresponds to GHz level. Indirect linewidth measurement An effective integrated linewidth ∆_ can be found by can be done through self-heterodyne/homodyne technique solving the equation: or measuring frequency noise using frequency discriminator. -

Autoencoding Neural Networks As Musical Audio Synthesizers
Proceedings of the 21st International Conference on Digital Audio Effects (DAFx-18), Aveiro, Portugal, September 4–8, 2018 AUTOENCODING NEURAL NETWORKS AS MUSICAL AUDIO SYNTHESIZERS Joseph Colonel Christopher Curro Sam Keene The Cooper Union for the Advancement of The Cooper Union for the Advancement of The Cooper Union for the Advancement of Science and Art Science and Art Science and Art NYC, New York, USA NYC, New York, USA NYC, New York, USA [email protected] [email protected] [email protected] ABSTRACT This training corpus consists of five-octave C Major scales on var- ious synthesizer patches. Once training is complete, we bypass A method for musical audio synthesis using autoencoding neural the encoder and directly activate the smallest hidden layer of the networks is proposed. The autoencoder is trained to compress and autoencoder. This activation produces a magnitude STFT frame reconstruct magnitude short-time Fourier transform frames. The at the output. Once several frames are produced, phase gradient autoencoder produces a spectrogram by activating its smallest hid- integration is used to construct a phase response for the magnitude den layer, and a phase response is calculated using real-time phase STFT. Finally, an inverse STFT is performed to synthesize audio. gradient heap integration. Taking an inverse short-time Fourier This model is easy to train when compared to other state-of-the-art transform produces the audio signal. Our algorithm is light-weight methods, allowing for musicians to have full control over the tool. when compared to current state-of-the-art audio-producing ma- This paper presents improvements over the methods outlined chine learning algorithms. -

Application of Noise Mapping in an Indian Opencast Mine for Effective Noise Management
12th ICBEN Congress on Noise as a Public Health Problem Application of noise mapping in an Indian opencast mine for effective noise management Veena Manwar1, Bibhuti Bhusan Mandal2, Asim Kumar Pal3 1 National Institute of Miners’ Health, Department of Occupational Hygiene, Nagpur, India (corresponding author) 2 National Institute of Miners’ Health, Department of Occupational Hygiene, Nagpur, India 3 Indian Institute of Technology-Indian School of Mines (IIT-ISM), Department of Environmental Science and Engineering, Dhanbad, India Corresponding author's e-mail address: [email protected] ABSTRACT So far as mining industry is concerned, noise pollution is not new. It is generated from operation of equipment and plants for excavation and transport of minerals which affects mine employees as well as population residing in nearby areas. Although in the Recommendations of Tenth Conference on Safety in Mines, noise mapping has been made mandatory in Indian mines still mining industry are not giving proper importance on producing noise maps of mines. Noise mapping is preferred for visualization and its propagation in the form of noise contours so that preventive measures are planned and implemented. The study was conducted in an opencast mine in Central India. Sound sources were identified and noise measurements were carried out according to national and international standards. Considering source locations along with noise levels and other meteorological, geographical factors as inputs, noise maps were generated by Predictor LimA software. Results were evaluated in the light of Central Pollution Control Board norms as to whether noise exposure in the residential and industrial area were within prescribed limits or not. -

Designline PROFILE 42
High Performance Displays FLAT TV SOLUTIONS DesignLine PROFILE 42 Plasma FlatTV 106cm / 42" WWW.CONRAC.DE HIGH PERFORMANCE DISPLAYS FLAT TV SOLUTIONS DesignLine PROFILE 42 (106cm / 42 Zoll Diagonale) Neu: Verarbeitet HD-Signale ! New: HD-Compliant ! Einerseits eine bestechend klare Linienführung. Andererseits Akzente durch die farblich gestalteten Profilleisten in edler Metallic-Lackierung. Das Heimkino-Erlebnis par Excellence. Impressively clear lines teamed with decorative aluminium strips in metallic finish provide coloured highlights. The ultimate home cinema experience. Für höchste Ansprüche: Die FlatTVs der DesignLine kombinieren Hightech mit einzigartiger Optik. Die komplette Elektronik sowie die hochwertigen Breitband-Stereolautsprecher wurden komplett ins Gehäuse integriert. Der im Lieferumfang enthaltene Design-Standfuß aus Glas lässt sich für die Wandmontage einfach und problemlos entfernen, so dass das Display noch platzsparender wie ein Bild an der Wand angebracht werden kann. Die extrem flachen Bildschirme bieten eine unübertroffene Bildbrillanz und -schärfe. Das lüfterlose Konzept basiert auf dem neuesten Stand der Technik: Ohne störende Nebengeräusche hören Sie nur das, was Sie hören möchten. Einfaches Handling per Fernbedienung und mit übersichtlichem On-Screen-Menü. Die Kombination aus Flachdisplay-Technologie, einer High Performance Scaling Engine und einem zukunftsweisenden De-Interlacer* mit speziellen digitalen Algorithmen zur optimalen Darstellung bewegter Bilder bietet Ihnen ein unvergleichliches Fernseherlebnis. Zusätzlich vermittelt die Noise Reduction eine angenehme Bildruhe. For the most decerning tastes: DesignLine flat panel TVs combine advanced technology with outstanding appearance. All the electronics and the high-quality broadband stereo speakers have been fully integrated in the casing. The design glass stand included in the scope of supply can easily be removed for wall assembly, allowing the display to be mounted to the wall like a picture to save even more space. -

Sensory Unpleasantness of High-Frequency Sounds
Acoust. Sci. & Tech. 34, 1 (2013) #2013 The Acoustical Society of Japan PAPER Sensory unpleasantness of high-frequency sounds Kenji Kurakata1;Ã, Tazu Mizunami1 and Kazuma Matsushita2 1National Institute of Advanced Industrial Science and Technology (AIST), AIST Central 6, 1–1–1 Higashi, Tsukuba, 305–8566 Japan 2National Institute of Technology and Evaluation (NITE), 2–49–10, Nishihara, Shibuya-ku, Tokyo, 151–0066 Japan ( Received 5 March 2012, Accepted for publication 2 August 2012 ) Abstract: The sensory unpleasantness of high-frequency sounds of 1 kHz and higher was investigated in psychoacoustic experiments in which young listeners with normal hearing participated. Sensory unpleasantness was defined as a perceptual impression of sounds and was differentiated from annoyance, which implies a subjective relation to the sound source. Listeners evaluated the degree of unpleasantness of high-frequency pure tones and narrow-band noise (NBN) by the magnitude estimation method. Estimates were analyzed in terms of the relationship with sharpness and loudness. Results of analyses revealed that the sensory unpleasantness of pure tones was a different auditory impression from sharpness; the unpleasantness was more level dependent but less frequency dependent than sharpness. Furthermore, the unpleasantness increased at a higher rate than loudness did as the sound pressure level (SPL) became higher. Equal-unpleasantness-level contours, which define the combinations of SPL and frequency of tone having the same degree of unpleasantness, were drawn to display the frequency dependence of unpleasantness more clearly. Unpleasantness of NBN was weaker than that of pure tones, although those sounds were expected to have the same loudness as pure tones. -

Time-Series Prediction of Environmental Noise for Urban Iot Based on Long Short-Term Memory Recurrent Neural Network
applied sciences Article Time-Series Prediction of Environmental Noise for Urban IoT Based on Long Short-Term Memory Recurrent Neural Network Xueqi Zhang 1,2 , Meng Zhao 1,2 and Rencai Dong 1,* 1 State Key Laboratory of Urban and Regional Ecology, Research Center for Eco-Environmental Sciences, Chinese Academy of Sciences, Beijing 100085, China; [email protected] (X.Z.); [email protected] (M.Z.) 2 College of Resources and Environment, University of Chinese Academy of Sciences, Beijing 100049, China * Correspondence: [email protected]; Tel.: +86-010-62849112 Received: 12 January 2020; Accepted: 6 February 2020; Published: 8 February 2020 Abstract: Noise pollution is one of the major urban environmental pollutions, and it is increasingly becoming a matter of crucial public concern. Monitoring and predicting environmental noise are of great significance for the prevention and control of noise pollution. With the advent of the Internet of Things (IoT) technology, urban noise monitoring is emerging in the direction of a small interval, long time, and large data amount, which is difficult to model and predict with traditional methods. In this study, an IoT-based noise monitoring system was deployed to acquire the environmental noise data, and a two-layer long short-term memory (LSTM) network was proposed for the prediction of environmental noise under the condition of large data volume. The optimal hyperparameters were selected through testing, and the raw data sets were processed. The urban environmental noise was predicted at time intervals of 1 s, 1 min, 10 min, and 30 min, and their performances were compared with three classic predictive models: random walk (RW), stacked autoencoder (SAE), and support vector machine (SVM). -

Application Note Template
correction. of TOI measurements with noise performance the improved show examples Measurement presented. is correction a noise of means by improvements range Dynamic explained. are analyzer spectrum of a factors the limiting correction. The basic requirements and noise with measurements spectral about This application note provides information | | | Products: Note Application Correction Noise with Range Dynamic Improved R&S R&S R&S FSQ FSU FSG Application Note Kay-Uwe Sander Nov. 2010-1EF76_0E Table of Contents Table of Contents 1 Overview ................................................................................. 3 2 Dynamic Range Limitations .................................................. 3 3 Signal Processing - Noise Correction .................................. 4 3.1 Evaluation of the noise level.......................................................................4 3.2 Details of the noise correction....................................................................5 4 Measurement Examples ........................................................ 7 4.1 Extended dynamic range with noise correction .......................................7 4.2 Low level measurements on noise-like signals ........................................8 4.3 Measurements at the theoretical limits....................................................10 5 Literature............................................................................... 11 6 Ordering Information ........................................................... 11 1EF76_0E Rohde & Schwarz -
Logarithmic Image Sensor for Wide Dynamic Range Stereo Vision System
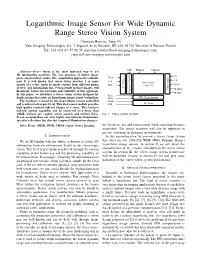
Logarithmic Image Sensor For Wide Dynamic Range Stereo Vision System Christian Bouvier, Yang Ni New Imaging Technologies SA, 1 Impasse de la Noisette, BP 426, 91370 Verrieres le Buisson France Tel: +33 (0)1 64 47 88 58 [email protected], [email protected] NEG PIXbias COLbias Abstract—Stereo vision is the most universal way to get 3D information passively. The fast progress of digital image G1 processing hardware makes this computation approach realizable Vsync G2 Vck now. It is well known that stereo vision matches 2 or more Control Amp Pixel Array - Scan Offset images of a scene, taken by image sensors from different points RST - 1280x720 of view. Any information loss, even partially in those images, will V Video Out1 drastically reduce the precision and reliability of this approach. Exposure Out2 In this paper, we introduce a stereo vision system designed for RD1 depth sensing that relies on logarithmic image sensor technology. RD2 FPN Compensation The hardware is based on dual logarithmic sensors controlled Hsync and synchronized at pixel level. This dual sensor module provides Hck H - Scan high quality contrast indexed images of a scene. This contrast indexed sensing capability can be conserved over more than 140dB without any explicit sensor control and without delay. Fig. 1. Sensor general structure. It can accommodate not only highly non-uniform illumination, specular reflections but also fast temporal illumination changes. Index Terms—HDR, WDR, CMOS sensor, Stereo Imaging. the details are lost and consequently depth extraction becomes impossible. The sensor reactivity will also be important to prevent saturation in changing environments. -

All You Need to Know About SINAD Measurements Using the 2023
applicationapplication notenote All you need to know about SINAD and its measurement using 2023 signal generators The 2023A, 2023B and 2025 can be supplied with an optional SINAD measuring capability. This article explains what SINAD measurements are, when they are used and how the SINAD option on 2023A, 2023B and 2025 performs this important task. www.ifrsys.com SINAD and its measurements using the 2023 What is SINAD? C-MESSAGE filter used in North America SINAD is a parameter which provides a quantitative Psophometric filter specified in ITU-T Recommendation measurement of the quality of an audio signal from a O.41, more commonly known from its original description as a communication device. For the purpose of this article the CCITT filter (also often referred to as a P53 filter) device is a radio receiver. The definition of SINAD is very simple A third type of filter is also sometimes used which is - its the ratio of the total signal power level (wanted Signal + unweighted (i.e. flat) over a broader bandwidth. Noise + Distortion or SND) to unwanted signal power (Noise + The telephony filter responses are tabulated in Figure 2. The Distortion or ND). It follows that the higher the figure the better differences in frequency response result in different SINAD the quality of the audio signal. The ratio is expressed as a values for the same signal. The C-MES signal uses a reference logarithmic value (in dB) from the formulae 10Log (SND/ND). frequency of 1 kHz while the CCITT filter uses a reference of Remember that this a power ratio, not a voltage ratio, so a 800 Hz, which results in the filter having "gain" at 1 kHz. -

Receiver Dynamic Range: Part 2
The Communications Edge™ Tech-note Author: Robert E. Watson Receiver Dynamic Range: Part 2 Part 1 of this article reviews receiver mea- the receiver can process acceptably. In sim- NF is the receiver noise figure in dB surements which, taken as a group, describe plest terms, it is the difference in dB This dynamic range definition has the receiver dynamic range. Part 2 introduces between the inband 1-dB compression point advantage of being relatively easy to measure comprehensive measurements that attempt and the minimum-receivable signal level. without ambiguity but, unfortunately, it to characterize a receiver’s dynamic range as The compression point is obvious enough; assumes that the receiver has only a single a single number. however, the minimum-receivable signal signal at its input and that the signal is must be identified. desired. For deep-space receivers, this may be COMPREHENSIVE MEASURE- a reasonable assumption, but the terrestrial MENTS There are a number of candidates for mini- mum-receivable signal level, including: sphere is not usually so benign. For specifi- The following receiver measurements and “minimum-discernable signal” (MDS), tan- cation of general-purpose receivers, some specifications attempt to define overall gential sensitivity, 10-dB SNR, and receiver interfering signals must be assumed, and this receiver dynamic range as a single number noise floor. Both MDS and tangential sensi- is what the other definitions of receiver which can be used both to predict overall tivity are based on subjective judgments of dynamic range do. receiver performance and as a figure of merit signal strength, which differ significantly to compare competing receivers. -

For the Falcon™ Range of Microphone Products (Ba5105)
Technical Documentation Microphone Handbook For the Falcon™ Range of Microphone Products Brüel&Kjær B K WORLD HEADQUARTERS: DK-2850 Nærum • Denmark • Telephone: +4542800500 •Telex: 37316 bruka dk • Fax: +4542801405 • e-mail: [email protected] • Internet: http://www.bk.dk BA 5105 –12 Microphone Handbook Revision February 1995 Brüel & Kjær Falcon™ Range of Microphone Products BA 5105 –12 Microphone Handbook Trademarks Microsoft is a registered trademark and Windows is a trademark of Microsoft Cor- poration. Copyright © 1994, 1995, Brüel & Kjær A/S All rights reserved. No part of this publication may be reproduced or distributed in any form or by any means without prior consent in writing from Brüel & Kjær A/S, Nærum, Denmark. 0 − 2 Falcon™ Range of Microphone Products Brüel & Kjær Microphone Handbook Contents 1. Introduction....................................................................................................................... 1 – 1 1.1 About the Microphone Handbook............................................................................... 1 – 2 1.2 About the Falcon™ Range of Microphone Products.................................................. 1 – 2 1.3 The Microphones ......................................................................................................... 1 – 2 1.4 The Preamplifiers........................................................................................................ 1 – 8 1 2. Prepolarized Free-field /2" Microphone Type 4188....................... 2 – 1 2.1 Introduction ................................................................................................................ -
AN279: Estimating Period Jitter from Phase Noise
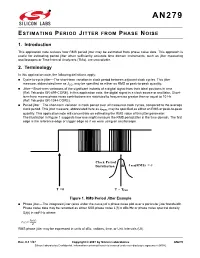
AN279 ESTIMATING PERIOD JITTER FROM PHASE NOISE 1. Introduction This application note reviews how RMS period jitter may be estimated from phase noise data. This approach is useful for estimating period jitter when sufficiently accurate time domain instruments, such as jitter measuring oscilloscopes or Time Interval Analyzers (TIAs), are unavailable. 2. Terminology In this application note, the following definitions apply: Cycle-to-cycle jitter—The short-term variation in clock period between adjacent clock cycles. This jitter measure, abbreviated here as JCC, may be specified as either an RMS or peak-to-peak quantity. Jitter—Short-term variations of the significant instants of a digital signal from their ideal positions in time (Ref: Telcordia GR-499-CORE). In this application note, the digital signal is a clock source or oscillator. Short- term here means phase noise contributions are restricted to frequencies greater than or equal to 10 Hz (Ref: Telcordia GR-1244-CORE). Period jitter—The short-term variation in clock period over all measured clock cycles, compared to the average clock period. This jitter measure, abbreviated here as JPER, may be specified as either an RMS or peak-to-peak quantity. This application note will concentrate on estimating the RMS value of this jitter parameter. The illustration in Figure 1 suggests how one might measure the RMS period jitter in the time domain. The first edge is the reference edge or trigger edge as if we were using an oscilloscope. Clock Period Distribution J PER(RMS) = T = 0 T = TPER Figure 1. RMS Period Jitter Example Phase jitter—The integrated jitter (area under the curve) of a phase noise plot over a particular jitter bandwidth.