Operating Manual for Tp -40 5 Model Rsd -5 6 Motor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications
American-Eurasian Journal of Scientific Research 11 (4): 271-274, 2016 ISSN 1818-6785 © IDOSI Publications, 2016 DOI: 10.5829/idosi.aejsr.2016.11.4.22905 Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications Mrs. J. Suganthi vinodhini and R. Samuel Rajesh Babu Research Scholar, Sathyabama University, India Abstract: In electric traction application electrical energy used was: 1.direct current and 2.alternating current. In this world already a constant voltage constant frequency single phase and three phase AC readily available. For some applications it is needed to have variable voltage and variable frequency for this conversions need between dc and ac sources and this conversion can be carried out by power converters. For converting AC–AC cycloconverter are widely used as a converter. The ns of alternating current drives relates with the frequency (f) and number of poles (p) present in the induction motor. It is not feasible by changing the poles of a motor under running processes, so the only one way during running condition the frequency can be varied. In the absence of direct current (DC) link with constant voltage constant frequency alternating current to variable voltage variable frequency alternating current is needed to run the electric traction applications, so the cycloconverter will make this as possible with reliable and economical. This work explains how to control the speed of single phase induction motor and single phase to single phase Cycloconverter using different frequency conversions with R Load was carried out using MATLAB / Simulink. Key words: Cycloconverter Electric traction Pulse width modulation Synchronous speed (ns ) INTRODUCTION switches instead of thyristors. -
Modeling, Analogue and Tests of an Electric Machine
MODELING, ANALOGUE AND TESTS OF AN ELECTRIC MACHINE VOLTAGE CONTROL SYSTEM 'by GRAHAM E.' DAWSON ( j B.A.Sc, University of British. Columbia, 1963. A THESIS SUBMITTED IN PARTIAL FULFILMENT OF THE REQUIREMENTS, FOR THE DEGREE OF MASTER OF APPLIED SCIENCE. in the Department of Electrical Engineering We accept this thesis as conforming to the required standard Members of the Committee Head of the Department .»»«... Members of the Department of Electrical Engineering THE UNIVERSITY OF BRITISH COLUMBIA September, 1966 In presenting this thesis in partial fulfilment of the requirements for an advanced degree at the University of British Columbia, I agree that the Library shall make it freely.avai1able for reference and study. I further agree that permission for ex• tensive copying of this thesis for scholarly purposes may be granted by the Head of my Department or by his representatives.. It is understood that copying or publication of this thesis for finan• cial gain shall not be allowed without my.written permission. Department of Electrical Engineering The University of British Columbia Vancou ve r.,8, Canada Date 7. MM ABSTRACT This thesis is concerned with the modeling, analogue and tests of an interconnected four electric machine voltage control system. Many analogue studies of electric machines have been done but most are concerned with the development of analogue techniques and only a few give substantiation of the validity of the analogue models through comparison of results from analogue studies and from real machine tests. Chapter 2 describes the procedure and the system under study. Chapter 3 describes the methods used for the determination of the electrical and mechanical system parameters. -
In a Mechanical System, a Differential
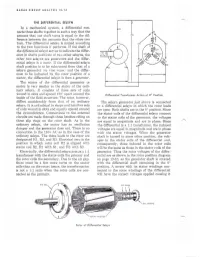
RADAR CIRCUIT ANALYSIS 13-14 THE DIFFERENTIAL SElSYN In a mechanical system, a differential con- 52 nects three shafts together in such a way that the amount that one shaft turns is equal to the dif- zsv ference between the amounts that the other two turn. The differential selsyn is named according to the two functions it performs. If the shaft of the differential selsyn serves to indicate the differ- ence in shafts positions of two other selsyns, the other two selsyns are generators and the differ- ential selsyn is a motor. If the differential selsyn shaft position is to be subtracted from that of a 53 selsyn generator (or vice versa) and the differ- ence to be indicated by the rotor position of a i----OV---o-i motor, the differential selsyn is then a generator. ~---OV--~~_-4 ~ The stator of the differential generator or motor is very similar to the stator of the ordi- nary selsyn. It consists of three sets of coils 0 wound in slots and spaced 120 apart around the Differential Transformer Action at 0° Position inside of the field structure. The rotor, however, differs considerably from that of an ordinary The selsyn generator just above is connected selsyn. It is cylindrical in shape and has three sets to a differential selsyn in which the rotor leads of coils wound in slots and equally spaced around are open. Both shafts are in the 0° position. Since the circumference. Connections to the external the stator coils of the differential selsyn connect circuits are made through three brushes riding on to the stator coils of the generator, the voltages three slip rings on the rotor shaft. -

SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit
Subject Code : SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit – I: DC Generators and Motors DC Generators : Types of generators – Series wound generator – Separately excited generator – Shunt wound generator – Condition for self excitation – Compound wound generator – Efficiency of DC machines. DC Motors: Back e.m.f. – Speed of a DC motor – Condition for maximum power – Armature reaction and commutation – Characteristics of D.C. motors – Motor starters – Speed control of D.C. motor. Unit – II - Transformers Transformer – Construction – Transformation ratio – Primary – No load current – Transformer on load – Effect of resistance – Equivalent circuit of static transformer – Testing of transformers – Use of transformers with measuring instruments. Unit – III: Electronic Control of AC Motors. Instability of AC motors – Variable speed induction motor drives – Torque speed characteristics of induction motors – Inverters for driving the motor – Speed control of induction motor by variable voltage - fixed frequency supply – Synchronous motor control. Unit – IV: Alternator and Amplidyne. Alternator – Construction – Operation – Frequency - Pitch factor and distribution factor – E.M.F. equation of alternator. Amplidyne – Amplification factor – Use of amplidyne in control – Amplidyne for control of voltage – Amplidyne for control of current. Unit – V: Industrial Timing Circuits. Introduction – Constituents of Industrial timing circuits – classification of timers – Thermal timers – Electro mechanical timers – Electronic timers – Classification of electronic timers – RC timing elements – Time base generators – SCR delay timer – IC electronic timer. Books for Study: 1. Industrial Electronics – G.K. Mithal – Khanna Publishers – Delhi – 15 th edition – 1992. 2. Electrical Technology – H. Cotton – CBS Publishers – Delhi. Books for References: 1. Electrical Technology – B.L. Theraja, A.K. Theraja – NIRJA construction and Development Co(p) Ltd. -

Brushless DC Electric Motor
Please read: A personal appeal from Wikipedia author Dr. Sengai Podhuvan We now accept ₹ (INR) Brushless DC electric motor From Wikipedia, the free encyclopedia Jump to: navigation, search A microprocessor-controlled BLDC motor powering a micro remote-controlled airplane. This external rotor motor weighs 5 grams, consumes approximately 11 watts (15 millihorsepower) and produces thrust of more than twice the weight of the plane. Contents [hide] 1 Brushless versus Brushed motor 2 Controller implementations 3 Variations in construction 4 AC and DC power supplies 5 KM rating 6 Kv rating 7 Applications o 7.1 Transport o 7.2 Heating and ventilation o 7.3 Industrial Engineering . 7.3.1 Motion Control Systems . 7.3.2 Positioning and Actuation Systems o 7.4 Stepper motor o 7.5 Model engineering 8 See also 9 References 10 External links Brushless DC motors (BLDC motors, BL motors) also known as electronically commutated motors (ECMs, EC motors) are electric motors powered by direct-current (DC) electricity and having electronic commutation systems, rather than mechanical commutators and brushes. The current-to-torque and frequency-to-speed relationships of BLDC motors are linear. BLDC motors may be described as stepper motors, with fixed permanent magnets and possibly more poles on the rotor than the stator, or reluctance motors. The latter may be without permanent magnets, just poles that are induced on the rotor then pulled into alignment by timed stator windings. However, the term stepper motor tends to be used for motors that are designed specifically to be operated in a mode where they are frequently stopped with the rotor in a defined angular position; this page describes more general BLDC motor principles, though there is overlap. -

Total Solutions for Quality Locomotive Electrical Rotating Component Remanufacturing
RPI Rail Products International, Inc. Total Solutions For Quality Locomotive Electrical Rotating Component Remanufacturing Alternators Generators Traction Motors Traction Motor Components We Know What You Want Services That Are Designed Around You The RPI organization has been built from the ground up to Rather than just providing a standard commodity, focus on the unique requirements of the railroad industry. RPI offers a true value-added approach to our product Now There Is One Source That Can Handle All There are a number of factors that distinguish RPI from offerings. We can tailor manufacturing processes and Your Locomotive Traction Component Repair, our competitors: customize our products and services to meet a variety • RPI is more responsive to individual customer needs. of customer demands and specifications. This gives RPI the ability to effectively operate as a “job shop” Rebuild And Remanufacturing Needs • RPI is quality driven with an emphasis on for small projects — or on a very large scale as a continuous improvement. In fact, we wrote the procedures used by OEM’s today to rebuild production manufacturing line. We can also provide traction motors. product development and product improvements or Rail Products International, Inc. (RPI) is a leader in upgrades. RPI offers a choice of repair, rebuild or • RPI maintains a high level of on-time delivery performance. providing remanufacturing services to the railroad remanufacturing of all components, supplemented by industry for electric transmission components • RPI offers extremely competitive pricing. a unit exchange program for armatures, coils, traction used for both freight and passenger locomotives. • RPI has over 75 years of remanufacturing experience. -

Optimization of Powertrain in EV
energies Article Optimization of Powertrain in EV Grzegorz Sieklucki Department of Power Electronics and Energy Control Systems, AGH University of Science and Technology, 30-059 Krakow, Poland; [email protected] Abstract: The method for preliminary powertrain design is presented in the paper. Performance of the EV is realized by motor torque–speed curve and gear ratio optimization. The typical two-zone mechanical characteristic of a PMSM traction motor is included in the optimization program. The longitudinal vehicle model is considered in the paper. Some examples try to show the calculation possibilities in application to existing vehicles: Tesla Model S and Mini Cooper SE. Keywords: electric vehicle; electromechanical systems; optimization; multi-objective optimization; field weakening; traction motors; kinematics; motor torque; gear 1. Introduction The conversion of electrical energy into mechanical is very important for the drive in an Electric Vehicle (EV) and optimization of the car performance is discussed in the article. The path from battery to a traction force FT on the car wheels is called powertrain [1,2]. The presented optimization problem can be used to design preliminary powertrain in a EV. The torque–speed curve (mechanical characteristics) [3] of PMSM (Permanent Magnet Synchronous Motor) is introduced. This type of motor is the most popular in car manufacturers (Toyota, Nissan, BMW, Renault), but Tesla induction motor characteristics are also considered. The EV mathematical model is presented more precisely than in [4]. Citation: Sieklucki, G. Optimization Two design examples are included in the paper: gear ratio optimization in Tesla Model S, of Powertrain in EV. Energies 2021, 14, traction motor, and gear ratio optimization in the Mini Cooper SE. -

Electrics of Diesel Locomotive
Electrics of Diesel locomotive Introduction Most of the Diesel Electric Locomotives serving in Indian Railways are single engined with one DC self ventilated, separately excited, single bearing main generator. However, in order to improve the reliability and reduce maintenance DC generator is replaced by a Traction Alternator and rectifier in latter generation locomotives. This supplies power to six nose suspended, force ventilated, series wound DC motors connected in three series pairs. Of late, Indian Railways have introduced GM locomotives with state of the art AC-AC locomotives. These locomotives have AC Traction Generator and AC Traction Motors. Power for electrically driven auxiliaries and control circuits is obtained from a self-excited, self ventilated auxiliary generator mounted on the end of main generator. This also supplies the battery charging current. Output of auxiliary generator is maintained constant at different speed by a voltage regulator. It also takes care about the limit of current going out to avoid damage to the generator. 8 lead acid batteries in series with four cells per battery, being provided for starting the engine by motoring the main generator, and to supply all the control circuits and the locomotive lighting. The locomotive is provided with electrical end jumper cables to enable it to work in multiple with a number of other locomotives. Power Circuits The main generator is basically separately excited with or without a differential series field to give the required characteristic form (Fig.E 2.1). Each traction motor has separate reversing switch contacts for reversing the field current, and also field diverting arrangements (Fig.E-2.2). -

IEEE Standard for Rotating Electric Machinery for Rail and Road Vehicles
IEEE Std 11-2000 (Revision of IEEE Std 11-1980) IEEE Standard for Rotating Electric Machinery for Rail and Road Vehicles Sponsor Electric Machinery Committee of the IEEE Power Engineering Society Approved 30 January 2000 IEEE-SA Standards Board Abstract: This standard applies to rotating electric machinery which forms part of the propulsion and major auxiliary equipment on internally and externally powered electrically propelled rail and road vehicles and similar large transport and haulage vehicles and their trailers where specified in the contract. Keywords: armature, electric input, electric output, impedance, load, phase control, propulsion, regeneration, shutdown, ventilation, waveforms, windage The Institute of Electrical and Electronics Engineers, Inc. 3 Park Avenue, New York, NY 10016-5997, USA Copyright © 2000 by the Institute of Electrical and Electronics Engineers, Inc. All rights reserved. Published 31 July 2000. Printed in the United States of America. Print: ISBN 0-7381-1922-9 SH94805 PDF: ISBN 0-7381-1923-7 SS94805 No part of this publication may be reproduced in any form, in an electronic retrieval system or otherwise, without the prior written permission of the publisher. Authorized licensed use limited to: Eaton Corporation. Downloaded on November 06,2013 at 21:02:26 UTC from IEEE Xplore. Restrictions apply. IEEE Standards documents are developed within the IEEE Societies and the Standards Coordinating Com- mittees of the IEEE Standards Association (IEEE-SA) Standards Board. Members of the committees serve voluntarily and without compensation. They are not necessarily members of the Institute. The standards developed within IEEE represent a consensus of the broad expertise on the subject within the Institute as well as those activities outside of IEEE that have expressed an interest in participating in the development of the standard. -

Intelligent Traction Motor Control Techniques for Hybrid and Electric Vehicles
Intelligent Traction Motor Control Techniques for Hybrid and Electric Vehicles By Scott Cash A thesis submitted to the University of Birmingham for the degree of Doctor of Philosophy Department of Mechanical Engineering The University of Birmingham September 2018 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. Abstract This thesis presents the research undertaken by the author within the field of intelligent traction motor control for Hybrid Electric Vehicle (HEV) and Electric Vehicle (EV) applications. A robust Fuzzy Logic (FL) based traction motor field-orientated control scheme is developed which can control multiple motor topologies and HEV/EV powertrain architectures without the need for re-tuning. This control scheme can aid in the development of an HEV/EV and for continuous control of the traction motor/s in the final production vehicle. An overcurrent-tolerant traction motor sizing strategy is developed to gauge if a prospective motor’s torque and thermal characteristics can fulfil a vehicle’s target dynamic and electrical objectives during the early development stages of an HEV/EV. An industrial case study is presented. -

Characteristics Analysis of Doubly Fed Magnetic Geared Motor Considering Winding Frequency Conditions
energies Article Characteristics Analysis of Doubly Fed Magnetic Geared Motor Considering Winding Frequency Conditions Homin Shin and Junghwan Chang * Mechatronics System Research Lab., Department of Electrical Engineering, Dong-A University, Saha-gu, Busan 49315, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-051-200-7735 Received: 28 August 2018; Accepted: 20 September 2018; Published: 26 September 2018 Abstract: The magnetic geared motor, which has improved torque density because of the magnetic gearing effect, has been researched. However, its narrow operating region due to the operating mechanism by the magnetic gearing effect and field flux by the PM is a challenge that needs to be overcome. Whereas, the doubly fed magnetic geared motor (DFMGM) can extend the operating region because of the double stator and double winding structure with the individual frequency control of the current fed to the inner and outer windings. However, two rotating magnetic fields, which are produced by the inner and outer winding flux, exist at the air-gap, and the large numbers of space harmonic components of the modulated flux density are produced at the air-gaps. These space harmonic components, which are produced by the winding MMF, influence not only the back-EMF of the winding but also the performances of the operating torque. Besides, the inner and outer windings affect each other in the back-EMF, and its characteristics appears differently in the inner and outer windings. Thus, in this paper, the structure, operating strategy, and basic characteristics according to the frequency condition in the inner and outer windings are presented. -

Controlling Transformers, Reactors Or Choke Coils Notes 1
H02P CPC COOPERATIVE PATENT CLASSIFICATION H ELECTRICITY (NOTE omitted) H02 GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER H02P CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS NOTES 1. This subclass covers arrangements for starting, regulating, electronically commutating, braking, or otherwise controlling motors, generators, dynamo-electric converters, clutches, brakes, gears, transformers, reactors or choke coils, of the types classified in the relevant subclasses, e.g. H01F, H02K. 2. This subclass does not cover similar arrangements for the apparatus of the types classified in subclass H02N, which arrangements are covered by that subclass. 3. In this subclass, the following terms or expressions are used with the meanings indicated: • "control" means influencing a variable in any way, e.g. changing its direction or its value (including changing it to or from zero), maintaining it constant or limiting its range of variation; • "regulation" means maintaining a variable at a desired value, or within a desired range of values, by comparison of the actual value with the desired value. 4. In this subclass, it is desirable to add the indexing codes of groups H02P 2101/00 and H02P 2103/00 WARNING In this subclass non-limiting references (in the sense of paragraph 39 of the Guide to the IPC) may still be displayed in the scheme. 1/00 Arrangements for starting electric motors or 1/10 . Manually-operated on/off switch controlling dynamo-electric converters (starting of synchronous relays or contactors operating sequentially motors with electronic commutators except reluctance for starting a motor (sequence determined motors, H02P 6/20, H02P 6/22; starting dynamo- by power-operated multi-position switch electric motors rotating step by step H02P 8/04; H02P 1/08) vector control H02P 21/00) 1/12 .