Unit I – Electric Drives and Traction Part - a 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Low Voltage General Purpose Dry Type Transformers
An Overview of Dry, Liquid & Cast Coil Transformers. What is Best for My Application? Ken Box, P.E. - Schneider Electric John Levine, P.E. - Levine Lectronics & Lectric Low Voltage General Purpose Dry Type Transformers Confidentia l Property of Schneider Electric | Selecting & Sizing Dry Type Transformers From EC&M Magazine http://www.csemag.com/single-article/selecting- sizing-transformers-for-commercial- buildings/4efa064775c5e26f27bfce4f0a61378e.htm l 3 Phase: 15 – 1000kVA, 600V max primary 1 Phase: 15 – 333 kVA, 600V max primary Specialty transformers, custom ratings, exceptions Insulation System The insulation system is the maximum internal temperature a transformer can tolerate before it begins to deteriorate and eventually fail. Most ventilated transformers use a Class 220°C insulation system. This temperature rating is the sum of the winding rise temperature, normally 150°C, the maximum ambient temperature, 40°C, and the hot spot allowance inside the coils, 30°C. Insulation = Winding rise + Coil Hot Spot + Max Ambient For ventilated transformers, 80°C and 115°C are also common low temperature rise transformer ratings. The standard winding temperature is 150°C for a ventilated transformer. All three of these temperature rise ratings utilize the 220°C insulation system. Insulation Class 220 insulation Class 180 insulation 40 C ambient 40 C ambient + 150 C average rise + 115 C average rise + 30 C hotspot + 25 C hotspot ______ ______ 220 C hotspot temp. 180 C hotspot temp. Class 200 Insulation Class 150 Insulation 40 C ambient 40 C ambient + 130 C average rise + 80 C average rise + 30 C hotspot + 30 C hotspot ______ ______ 200 C hotspot temp. -
Class-E Audio Modulated Tesla Coil Instruction Manual
Class-E Audio Modulated Tesla Coil CCllaassss--EE AAuuddiioo MMoodduullaatteedd TTeessllaa CCooiill IInnssttrruuccttiioonn MMaannuuaall Eastern Voltage Research, LLC May 19, 2017 REV F − 1 − http://www.EasternVoltageResearch.com Class-E Tesla Coil Instruction Manual Class-E Audio Modulated Tesla Coil BOARD REVISION C This manual only applies to the new Revision C PCB boards. These boards can be identified by their red or green silkscreen color as well as the marking SC2076 REV C which is located underneath the location for T41 on the upper right of the PCB board. May 19, 2017 REV F − 2 − http://www.EasternVoltageResearch.com Class-E Tesla Coil Instruction Manual Class-E Audio Modulated Tesla Coil AGE DISCLAIMER THIS KIT IS AN ADVANCED, HIGH POWER SOLID STATE POWER DEVICE. IT IS INTENDED FOR USE FOR INDIVIDUALS OVER 18 YEARS OF AGE WITH THE PROPER KNOWLEDGE AND EXPERIENCE, AS WELL AS FAMILIARITY WITH LINE VOLTAGE POWER CIRCUITS. BY BUILDING, USING, OR OPERATING THIS KIT, YOU ACKNOWLEDGE THAT YOU ARE OVER 18 YEARS OF AGE, AND THAT YOU HAVE THOROUGHLY READ THROUGH THE SAFETY INFORMATION PRESENTED IN THIS MANUAL. THIS KIT SHALL NOT BE USED AT ANY TIME BY INDIVIDUALS UNDER 18 YEARS OF AGE. May 19, 2017 REV F − 3 − http://www.EasternVoltageResearch.com Class-E Tesla Coil Instruction Manual Class-E Audio Modulated Tesla Coil SAFETY AND EQUIPMENT HAZARDS PLEASE BE SURE TO READ AND UNDERSTAND ALL SAFETY AND EQUIPMENT RELATED HAZARDS AND WARNINGS BEFORE BUILDING AND OPERATING YOUR KIT. THE PURPOSE OF THESE WARNINGS IS NOT TO SCARE YOU, BUT TO KEEP YOU WELL INFORMED TO WHAT HAZARDS MAY APPLY FOR YOUR PARTICULAR KIT. -
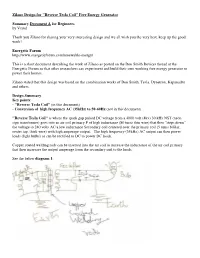
Zilano Design for "Reverse Tesla Coil" Free Energy Generator
Zilano Design for "Reverse Tesla Coil" Free Energy Generator Summary Document A for Beginners by Vrand Thank you Zilano for sharing your very interesting design and we all wish you the very best, keep up the good work! Energetic Forum http://www.energeticforum.com/renewable-energy/ This is a short document describing the work of Zilano as posted on the Don Smith Devices thread at the Energetic Forum so that other researchers can experiment and build their own working free energy generator to power their homes. Zilano stated that this design was based on the combination works of Don Smith, Tesla, Dynatron, Kapanadze and others. Design Summary Key points : - "Reverse Tesla Coil" (in this document) - Conversion of high frequency AC (35kHz) to 50-60Hz (not in this document) "Reverse Tesla Coil" is where the spark gap pulsed DC voltage from a 4000 volt (4kv) 30 kHz NST (neon sign transformer) goes into an air coil primary P of high inductance (80 turns thin wire) that then "steps down" the voltage to 240 volts AC a low inductance Secondary coil centered over the primary coil (5 turns bifilar, center tap, thick wire) with high amperage output. The high frequency (35kHz) AC output can then power loads (light bulbs) or can be rectified to DC to power DC loads. Copper coated welding rods can be inserted into the air coil to increase the inductance of the air coil primary that then increases the output amperage from the secondary coil to the loads. See the below diagram 1 : Parts List - NST 4KV 20-35KHZ - D1 high voltage diode - SG1 SG2 spark gaps - C1 primary tuning HV capacitor - P Primary of air coil, on 2" PVC tube, 80 turns of 6mm wire - S Secondary 3" coil over primary coil, 5 turns bifilar (5 turns CW & 5 turns CCW) of thick wire (up to 16mm) with center tap to ground. -

Control of DC Servomotor
Control of DC Servomotor Report submitted in partial fulfilment of the requirement to the degree of B.SC In Electrical and Electronic Engineering Under the supervision of Dr. Abdarahman Ali Karrar By Mohammed Sami Hassan Elhakim To Department of Electrical and Electronic Engineering University of Khartoum July 2008 Dedication I would like to take this opportunity to write these humble words that are unworthy of expressing my deepest gratitude for all those who made this possible. First of all I would like to thank god for my general existence and everything else around and within me. Second I would like to thank my beloved parents(Sami & Sawsan), my brothers (Tarig & Hassan), and my sister (Latifa), thank you so much for your support, guidance and care, you were always there to make me feel better and encourage me. I would like also to thanks all my friends inside and out Khartoum university, thank you for your patients tolerance and understanding, for your endless love that has stretched so far, for easing my pain and pulling me through. A special thanks to my partner Muzaab Hashiem without his help and advice i won’t be able to do what i did, thank you for being an ideal partner, friend and bother. Last but not the least i would like to thank my supervisor Dr. Karar and all those who helped me throughout this project, thank you for filling my mind with this rich knowledge. Mohammed Sami Hassan Elhakim. I Acknowledgement The first word goes to God the Almighty for bringing me to this world and guiding me as i reached this stage in my life and for making me live and see this work. -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -

The Self-Excitation Process in Electrical Rotating Machines Operating in Pulsed Power Regime
1 The Self-excitation Process in Electrical Rotating Machines Operating in Pulsed Power Regime M.D. Driga The University of Texas Department of Electrical and Computer Engineering S.B. Pratap, A.W. Walls, and J.R. Kitzmiller The Center for Electromechanics at The University of Texas at Austin simultaneously the voltage and current would rise so Abstract-- The self-excitation process in pulsed air-core excessively that the machine would burn out...” rotating generators is fundamental in assuring record values of This statement is incomplete, since the machine does not power density and compactness. This paper will analyze the burn out if the excessive currents are flowing during a conditions for the self-excitation process in pulsed electrical relatively short pulse - intensity and duration being in machines used as power supplies for electromagnetic launchers, competition - but involuntarily suggests the use of self- using the analogy and methods of the positive feedback in control excitation in pulsed rotating, electric generators for EML systems. technologies in which the pulse duration is measured in In the classical "ferromagnetic" electrical machines in the milliseconds. Of course, even in EML pulsed rotating power self-excitation process, the machine output is used in order to supplies, the runaway self-excitation may be stopped by fault gradually excite the generator until the steady-state voltage is conditions such as mechanical failure from excess braking finally reached. The end of the process and, consequently, the force, increased ohmic losses from heating and even depletion stability and repeatability, is assured by the intersection of the (or insufficient) rotational kinetic energy stored (quantified by strongly nonlinear magnetization characteristic and the ω=ω excitation straight line. -

Tesla Coil Project
Tesla Coil Project In this project, you’ll learn about resonant circuits and how to build oscillators that zero in on a desired region of the resonance. You will also learn about how to safely handle high-voltage DC circuits and ultra-high voltage radio frequency circuits. You will learn how do describe a circuit’s behavior using algebraic equations based on Kirchoffs’ current law. Finally, you will use your ICAP/4 simulator to solve these equations. Danger, High Voltage Hazard: Almost all Tesla Coil circuitry carries dangerously high voltage. You should turn the AC mains power to your Tesla Coil circuit off before connecting any instrumentation. Filter capacitors require bleed resistors that will discharge the capacitors to a safe level within 1 second after power is switched off. The person that connects the instrumentation should be the one that turns the AC power on and off. It is not the time to learn communication skills! Do not touch any of the circuitry when power is applied. The resonant circuits place dangerously high voltages on the primary side of the Tesla Coil as well as its secondary. While some smaller plasma streamers are harmless, you don’t want to be near or touch the Tesla Coil secondary. When working with high voltage, some experienced engineers tell you to keep one hand in your pocket; that makes it harder for you to become part of the circuit. It has become common around the Christmas holiday to see variations of Tesla Coils in the high-end gadget stores. The high voltage, high frequency emissions interact with air and other gas to make a dazzling array of visual effects. -

Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications
American-Eurasian Journal of Scientific Research 11 (4): 271-274, 2016 ISSN 1818-6785 © IDOSI Publications, 2016 DOI: 10.5829/idosi.aejsr.2016.11.4.22905 Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications Mrs. J. Suganthi vinodhini and R. Samuel Rajesh Babu Research Scholar, Sathyabama University, India Abstract: In electric traction application electrical energy used was: 1.direct current and 2.alternating current. In this world already a constant voltage constant frequency single phase and three phase AC readily available. For some applications it is needed to have variable voltage and variable frequency for this conversions need between dc and ac sources and this conversion can be carried out by power converters. For converting AC–AC cycloconverter are widely used as a converter. The ns of alternating current drives relates with the frequency (f) and number of poles (p) present in the induction motor. It is not feasible by changing the poles of a motor under running processes, so the only one way during running condition the frequency can be varied. In the absence of direct current (DC) link with constant voltage constant frequency alternating current to variable voltage variable frequency alternating current is needed to run the electric traction applications, so the cycloconverter will make this as possible with reliable and economical. This work explains how to control the speed of single phase induction motor and single phase to single phase Cycloconverter using different frequency conversions with R Load was carried out using MATLAB / Simulink. Key words: Cycloconverter Electric traction Pulse width modulation Synchronous speed (ns ) INTRODUCTION switches instead of thyristors. -

DC Servo Motor Modeling
MODELING DC SERVOMOTORS CONTROL SYSTEMS TECH NOTE © Dr. Russ Meier, MSOE INTRODUCTION A DC motor is an actuator that converts electrical energy to mechanical rotation using the principles of electromagnetism. The circuit symbol for a DC motor is shown in Figure 1. + Va M - Figure 1: Circuit symbol for a DC servomotor The learning objectives of this technical note are: 1. Draw the equivalent DC servomotor circuit theory model. 2. State the equations of motion used to derive the electromechanical transfer function in the time domain and the s-domain. 3. Draw the DC servomotor signal block diagram. 4. Derive the DC servomotor electromechanical transfer function. CIRCUIT THEORY MODEL The circuit shown in Figure 2 models the DC servomotor. Note that an armature control current is created when the armature control voltage, Va, energizes the motor. The current flow through a series-connected Ra La + + Tm Va Vb R θ m - - Figure 2: DC servomotor circuit theory model armature resistance, an armature inductance, and the rotational component (the rotor) of the motor. The rotor shaft is typically drawn to the right with the torque (Tm) and angular displacement (θm) variables shown. The motor transfer function is the ratio of angular displacement to armature voltage. Figure 3: The DC servomotor transfer function EQUATIONS OF MOTION Three equations of motion are fundamental to the derivation of the transfer function. Relationships between torque and current, voltage and angular displacement, and torque and system inertias are used. Torque is proportional to the armature current. The constant of proportionality is called the torque constant and is given the symbol Kt. -

Mitsubishi Electric Generator Robotic Inspections “Genspider®”
Mitsubishi Electric Generator Robotic Inspections ® “GenSPIDER ” Generator Smart & Precise Inspection Accomplished by Generator Dedicated Expert Robot Mitsubishi Electric Generator Robotic Inspections GenSPIDER® Contents 1. Introduction 2 2. GenSPIDER® Features 3 � Compact 3 � Quantitative Approach to Wedge Tapping 3 � Outage Duration Reduction 4 � Two Inspectors 4 3. Benefits 5 4. Robotic Inspection Capabilities 5 � Visual Inspection 5 � Stator Wedge Tapping 6 � EL-CID 6 5. Robotic Inspection Equipment 7 6. Summary 8 List of Figures 8 List of Tables 8 1 Mitsubishi Electric Generator Robotic Inspections GenSPIDER® 1. Introduction Power plant availability is a key focus in the industry worldwide and continuous generator operation is more likely when a comprehensive maintenance program is implemented by the owner. However, Mitsubishi Electric recognizes the customer needs to maintain a high level of availability while minimizing maintenance costs. Therefore, the GenSPIDER® was developed in order to offer an alternative to frequent, costly major generator inspections while still providing intelligence as to the condition of the generator. Conventional generator inspections are costly and require a long outage duration, in part because the rotor must be removed. Electric power producers have been looking to shorten these inspections as well as improve inspection accuracy to extend the availability of their generators. Mitsubishi Electric Corporation developed a dedicated robot capable of inspecting a turbine generator by passing through the narrow gap between the rotor and stator (air gap), eliminating the need to remove the rotor. Hence, more thorough inspections can be completed within short duration outage. Further, thanks to its high accuracy, interior inspections can be carried out less frequently and help operators avoid stocking parts they do not yet actually need. -

Report of Contributions
MT25 Conference 2017 - Timetable, Abstracts, Orals and Posters Report of Contributions https://indico.cern.ch/e/MT25-2017 MT25 Conferenc … / Report of Contributions 3D Electromagnetic Analysis of Tu … Contribution ID: 5 Type: Poster Presentation of 1h45m 3D Electromagnetic Analysis of Tubular Permanent Magnet Linear Launcher Tuesday, 29 August 2017 13:15 (1h 45m) A short stroke and large thrust axial magnetized tubular permanent magnet linear launcher (TPMLL) with non-ferromagnetic rings is presented in this paper. Its 3D finite element (FE) models are estab- lished for sensitivity analyses on some parameters, such as air gap thickness, permanent magnet thickness, permanent magnet width, stator yoke thickness and four types of permanent magnet material, ferrite, NdFeB, AlNiCO5 and Sm2CO17 are conducted to achieve greatest thrust. Then its 2D finite element (FE) models are also established. The electromagnetic thrusts calculated by 2D and 3D finite element method (FEM) and got from prototype test are compared. Moreover, the prototype static and dynamic tests are conducted to verify the 2D and 3D electromagnetic analysis. The FE software FLUX provides the interface with the MATLAB/Simulink to establish combined simulation. To improve the accuracy of the simulation, the combined simulation between the model of the control system in Matlab/Simulink and the 3D FE model of the TPMLL in FLUX is built in this paper. The combined simulation between the control system and the 3D FE modelof the TPMLL is built. A prototype is manufactured according to the final designed dimensions. The photograph of the developed TPMLL prototype with thrust sensor and the magnetic powder brake as the load are shown. -

Course Description Bachelor of Technology (Electrical Engineering)
COURSE DESCRIPTION BACHELOR OF TECHNOLOGY (ELECTRICAL ENGINEERING) COLLEGE OF TECHNOLOGY AND ENGINEERING MAHARANA PRATAP UNIVERSITY OF AGRICULTURE AND TECHNOLOGY UDAIPUR (RAJASTHAN) SECOND YEAR (SEMESTER-I) BS 211 (All Branches) MATHEMATICS – III Cr. Hrs. 3 (3 + 0) L T P Credit 3 0 0 Hours 3 0 0 COURSE OUTCOME - CO1: Understand the need of numerical method for solving mathematical equations of various engineering problems., CO2: Provide interpolation techniques which are useful in analyzing the data that is in the form of unknown functionCO3: Discuss numerical integration and differentiation and solving problems which cannot be solved by conventional methods.CO4: Discuss the need of Laplace transform to convert systems from time to frequency domains and to understand application and working of Laplace transformations. UNIT-I Interpolation: Finite differences, various difference operators and theirrelationships, factorial notation. Interpolation with equal intervals;Newton’s forward and backward interpolation formulae, Lagrange’sinterpolation formula for unequal intervals. UNIT-II Gauss forward and backward interpolation formulae, Stirling’s andBessel’s central difference interpolation formulae. Numerical Differentiation: Numerical differentiation based on Newton’sforward and backward, Gauss forward and backward interpolation formulae. UNIT-III Numerical Integration: Numerical integration by Trapezoidal, Simpson’s rule. Numerical Solutions of Ordinary Differential Equations: Picard’s method,Taylor’s series method, Euler’s method, modified