Control of DC Servomotor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glossary Defns of Terms 1998-10 TWG INCOSE .Doc
INCOSE SE Terms Glossary Version 0 October 1998 INCOSE SE Terms Glossary Document No.: TBD Version/Revision: 0 Date: October, 1998 File: Glossary Defns of Terms 1998-10 TWG INCOSE .doc Prepared by: INCOSE Concepts and Terms WG International Council on Systems Engineering (INCOSE) 2150 N. 107th Street, Suite 205 Seattle, WA 98133-9009 NOTICE This data was prepared by the Terminology Working Group of the International Council on Systems Engineering (INCOSE) for review and comment only. It is has been released by that agency as INCOSE Technical Data. It is subject to change without notice and may not be referred to as an INCOSE Technical Product. Copyright (c) 1998 by INCOSE, subject to the following restrictions: Author Use. Authors have full rights to use their contributions in a totally unfettered way. Abstraction is permitted with credit to the source. INCOSE Use. Permission to reproduce and use this document and to prepare derivative works from this document for INCOSE use is granted, provided this copyright notice is included with all reproductions and derivative works. External Use. This document may not be shared or distributed to any non-INCOSE third party. Requests for permission to reproduce this document in whole or part, or to prepare derivative works of this document for external and/or commercial use are prohibited. Copying, scanning, retyping, or any other form of reproduction of the content of whole pages or source documents is prohibited and shall not be approved by INCOSE. Electronic Version Use. Any electronic version of this document is to be used for personal use only and is not to be placed on a non-INCOSE sponsored server for general use. -

DC Servo Motor Modeling
MODELING DC SERVOMOTORS CONTROL SYSTEMS TECH NOTE © Dr. Russ Meier, MSOE INTRODUCTION A DC motor is an actuator that converts electrical energy to mechanical rotation using the principles of electromagnetism. The circuit symbol for a DC motor is shown in Figure 1. + Va M - Figure 1: Circuit symbol for a DC servomotor The learning objectives of this technical note are: 1. Draw the equivalent DC servomotor circuit theory model. 2. State the equations of motion used to derive the electromechanical transfer function in the time domain and the s-domain. 3. Draw the DC servomotor signal block diagram. 4. Derive the DC servomotor electromechanical transfer function. CIRCUIT THEORY MODEL The circuit shown in Figure 2 models the DC servomotor. Note that an armature control current is created when the armature control voltage, Va, energizes the motor. The current flow through a series-connected Ra La + + Tm Va Vb R θ m - - Figure 2: DC servomotor circuit theory model armature resistance, an armature inductance, and the rotational component (the rotor) of the motor. The rotor shaft is typically drawn to the right with the torque (Tm) and angular displacement (θm) variables shown. The motor transfer function is the ratio of angular displacement to armature voltage. Figure 3: The DC servomotor transfer function EQUATIONS OF MOTION Three equations of motion are fundamental to the derivation of the transfer function. Relationships between torque and current, voltage and angular displacement, and torque and system inertias are used. Torque is proportional to the armature current. The constant of proportionality is called the torque constant and is given the symbol Kt. -
Direct Drive Dc Torque Servo Motors
DIRECT DRIVE DC TORQUE SERVO MOTORS QT- Series Rare Earth Magnet Motors DIRECT DRIVE DC SERVO MOTORS The Direct Drive DC Torque motor is a servo actuator which can be directly attached to the load it drives. It has a permanent magnet (PM) field and a wound armature which act together to convert electrical power to torque. This torque can then be utilized in positioning or speed control systems. In general, torque motors are deigned for three different types of operation: » High stall torque (“stand-still” operation) for positioning systems » High torque at low speeds for speed control systems » Optimum torque at high speed for positioning, rate, or tensioning systems SUPERIOR QUALITY With the widest range of standard and custom motion solutions, we collaborate with you to deploy rugged, battle-worthy systems engineered and built to meet your singular requirements. Kollmorgen provides direct drive servo motor solutions for the following applications: » Weapons stations and gun turrets » Missile guidance and precision-guided munitions » Radar pedestals and tracking stations » Unmanned ground, aerial and undersea vehicles » Ground vehicles and sea systems » Aircraft and spacecraft systems » Camera gimbals » IR countermeasure platforms » Laser weapon platforms QT- Series D irect Drive DC Servo Motors Advantages of Direct Drive DC Torque Motors Direct drive torque motors are particularly suited for servo system applications where it is desirable to minimize size, weight, power and response time, and to maximize rate and position accuracies. Frameless motors range from 28.7mm (1.13in) OD weighing 1.4 ounces (.0875 lbs) to a 4067 N-m (3000 lb-ft) unit with a 1067mm (42in) OD and a 660.4mm (26in) open bore ID. -
In a Mechanical System, a Differential
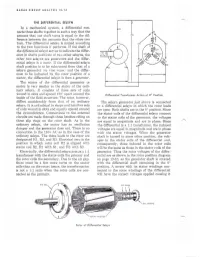
RADAR CIRCUIT ANALYSIS 13-14 THE DIFFERENTIAL SElSYN In a mechanical system, a differential con- 52 nects three shafts together in such a way that the amount that one shaft turns is equal to the dif- zsv ference between the amounts that the other two turn. The differential selsyn is named according to the two functions it performs. If the shaft of the differential selsyn serves to indicate the differ- ence in shafts positions of two other selsyns, the other two selsyns are generators and the differ- ential selsyn is a motor. If the differential selsyn shaft position is to be subtracted from that of a 53 selsyn generator (or vice versa) and the differ- ence to be indicated by the rotor position of a i----OV---o-i motor, the differential selsyn is then a generator. ~---OV--~~_-4 ~ The stator of the differential generator or motor is very similar to the stator of the ordi- nary selsyn. It consists of three sets of coils 0 wound in slots and spaced 120 apart around the Differential Transformer Action at 0° Position inside of the field structure. The rotor, however, differs considerably from that of an ordinary The selsyn generator just above is connected selsyn. It is cylindrical in shape and has three sets to a differential selsyn in which the rotor leads of coils wound in slots and equally spaced around are open. Both shafts are in the 0° position. Since the circumference. Connections to the external the stator coils of the differential selsyn connect circuits are made through three brushes riding on to the stator coils of the generator, the voltages three slip rings on the rotor shaft. -

Permanent Magnet Servomotor and Induction Motor Considerations
Permanent Magnet Servomotor and Induction Motor Considerations Kollmorgen B-104 PM Brushless Servomotor at 0.4 HP Kollmorgen M-828 PM Brushless Rotor Kollmorgen B-802 PM Brushless Servomotor at 15 HP Kollmorgen B-808 PM Brushless Rotor Permanent Magnet Servomotor and Induction Motor Considerations 1 Lee Stephens, Senior Motion Control Engineer Permanent Magnet Servomotor and Induction Motor Considerations Motion long considered a mainstay of induction motors, encroachment in the area of 50 HP and greater have been seen recently for some applications by permanent magnet (PM) servomotors. These applications usually have dynamic considerations that require position-time closed loop and high accelerations. When accelerating large loads, permanent magnet servomotors can work with very high load to inertia ratios and still maintain performance requirements. Having a lower inertia typically will allow for less permanent magnet motor can result in a greater torque energy wasted within the motor. Torque (τ), is the density than an equivalent induction system. If size product of inertia (j) and rotary acceleration (α). If you matters, then perhaps a system should use one require inertia matching, ½ of your energy is wasted technology over another. Speaking of size, the inertia accelerating the motor alone. If the inertia ratio from ratio can be an important figure of merit should motor to load is large, then control schemes must be dynamic needs arise. If you are going to have high dynamic enough to prevent the larger load from driving accelerations and decelerations, the size of the rotor the motor as opposed to the motor controlling the load. will significantly increase the inertia and decrease the Tradeoffs and knowing what can be negotiated. -
Control System Lab Lab Manual
CONTROL SYSTEM LAB (EC-616-F) CONTROL SYSTEM LAB (EC-616-F) LAB MANUAL VI SEMESTER Department of Electronics & Computer Engg Dronacharya College of Engineering Khentawas, Gurgaon – 123506 CONTROL SYSTEM LAB (EC-616-F) CONTROL SYSTEM LIST OF EXPERIMENTS PAGE S. NO NAME OF THE EXPERIMENT NO. 1. TO STUDY A.C SERVO MOTOR AND PLOT ITS 1 TORQUE SPEED CHARACTERISTICS. TO STUDY D.C SERVO MOTOR AND PLOT ITS 5 2. TORQUE SPEED CHARACTERISTICS. TO STUDY THE MAGNETIC AMPLIFIER AND PLOT ITS 8 LOAD CURRENT V/S CONTROL CURRENT 3. CHARACTERISTIC FOR (A)SERIES CONNECTED MODE (B)PARALLEL CONNECTED MODE. TO PLOT THE LOAD CURRENT V/S CONTROL 11 4. CURRENT CHARACTERISTICS FOR SELF EXCITED MODE OF THE MAGNETIC AMPLIFIER. 5. TO STUDY LEAD LAG COMPENSATOR AND DRAW 14 MAGNITUDE AND PHASE PLOTS. TO STUDY A STEPPER MOTOR & EXECUTE 17 MICROPROCESSOR OR COMPUTER BASED CONTROL 6. OF THE SAME BY CHANGING NUMBER OF STEPS, DIRECTION OF ROTATION & SPEED. TO IMPEMENT A PID CONTROLLER FOR LEVEL 20 7. CONTROL OF A PILOT PLANT TO STUDY THE BASIC OPEN LOOP AND CLOSED LOOP 23 8. CONTROL SYSTEM. TO STUDY WATER LEVEL CONTROL USING 26 9. INDUSTRIAL PLC. TO STUDY THE MATLAB PACKAGE FOR SIMULATION 29 10. OF CONTROL SYSTEM DESIGN. CONTROL SYSTEM LAB (EC-616-F) EXPERIMENT NO: 1 AIM: - To study AC servo motor and plot its torque speed Characteristics. APPARATUS REQUIRED: - AC Servo Motor Setup, Digital Multimeter and Connecting Leads. THEORY: - AC servomotor has best use for low power control applications. Its important parameters are speed – torque characteristics. An AC servomotor is basically a two phase induction motor which consist of two stator winding oriented 90* electrically apart. -

Servomotor Parameters and Their Proper Conversions for Servo Drive Utilization and Comparison
Servomotor Parameters and their Proper Conversions for Servo Drive Utilization and Comparison Servomotor Parameters and their Proper Conversions for Servo Drive Utilization and Comparison 1 Hurley Gill, Senior Application / Systems Engineer Servomotor Parameters and their Proper Conversions for Servo Drive Utilization and Comparison Utilization of servomotor parameters in their correct units of measure as defined by the drive manufacturer is imperative for achieving desired mechanism performance. But without proper understanding of motor and drive parameter details relative to their defined terms, units, nomenclature and the calculated conversions between them, incorrect units are likely to be applied which complicate both machine design development and the manufacturing process. This white paper demonstrates exactly how and 6-step (i.e. trapezoidal commutation). While machine designers can overcome challenges most servomotor parameters are presented in one around servomotor parameters and apply them of three ways, they are often mixed between the correctly for any motor or drive to meet specific two different electronic commutation methods. requirements. A customary standard set of servo (Refer to Motor Parameters Conversion Table on units is thoroughly explained together with their page 6.) typical nomenclature and the applicable conversions between them. Typical terminologies used to describe While the motor parameter data entered into the servomotors are: Brushless DC Motor (BDCM or servo drive must be in the units that the designer BLDCM) Servo, Brushless DC/AC Synchronous specifically intended, there are often differences Servomotor, AC Permanent Magnet (PM) Servo between this data and their defined corresponding and other similar naming conventions. Most of units of measure presented on a motor datasheet. -

EE 3TP4: Signals and Systems Lab 5: Control of a Servomechanism Tim Davidson Ext
EE 3TP4: Signals and Systems Lab 5: Control of a Servomechanism Tim Davidson Ext. 27352 [email protected] Objective To identify the plant model of a servomechanism, and explore the trade-off between rise time and overshoot incurred in proportional control of the servo(mechanism). Assessment Your mark for this lab will be assessed on your ability to complete each section. The marks for each section are indicated at the beginning of the section. Please demonstrate your results to the TAs and have your mark recorded. Please attend the lab section to which you have been assigned. 1 Description of Laboratory Equipment In this lab we will deal with an angular positioning system based around a DC motor. Such schemes are often used to position heavy or difficult to move objects using a ‘command tool’ which is easy to move. For example, moving the control surfaces of an aircraft using the lever in the cockpit. In our system, the plant is the motor (and its associated electronics). The input to the plant is a control signal c(t) and the output of the plant is a voltage which is proportional to the angle of the motor shaft, θ(t). Using information about the structure of the motor and Newtonian mechanics, the operation of the motor can be described by the following differential equation: d2θ(t) dθ(t) J + B = Kmc(t); (1) dt2 dt where J is the rotational inertia of the motor, B is the damping in the motor structure, and Km is the (internal) gain of the motor. -

Servo Systems
2012/3/26 Servo Systems Department of Mechanical Engineering Lecturer: Jia-Yush Yen 4/7/2010 A Control System Reference command Output Controller Actuator Plant Measurement Servo Systems 2 1 2012/3/26 Outline • Motors – Synchronous motor – Induction motor – DC motor –BLDC –PMAC – PWM principle – Driver design Servo Systems 3 Servo vs. Process System •A servomechanism is a feedback control system in which the controlled variable is a (mechanical) position, velocity, torque, frequency, etc. •A process control generally refers to control of other variables as liquid level, pressure, temperature, density, concentration, or chemical composition. Servo Systems 4 2 2012/3/26 Servo System Loop Set Point Network http://www.a-m- c.com/content/m101/generalservosystems. Servo Systems html 5 Motors http://en.wikipedia.org/wiki/Motor • Electric motor – a machine that converts electricity into a mechanical motion – AC motor, an electric motor that is driven by alternating current • Synchronous motor • Induction motor – DC motor, an electric motor that runs on direct current electricity • Brushed DC electric motor • Brushless DC motor – Linear motor – Stepper motor • Servo motor – an electric motor that operates a servo, Servocommonly Systems used in robotics 6 3 2012/3/26 Calculating Magnetic Field • Magnetic Field Intensity: where μ is the permeability • Magnetomotive force (mmf): Servo Systems 7 AC SYNCHRONOUS MOTOR Servo Systems 8 4 2012/3/26 AC Synchronous Motor • A synchronous electric motor is an AC motor distinguished by a rotor spinning with coils passing magnets at the same rate as the alternating current and resulting magnetic field which drives it. Another way of saying this is that it has zero slip under usual operating conditions http://www.mwit.ac.th/~Phy http://en.wikipedia.org/wiki/Sy sicslab/hbase/magnetic/mo nchronous_motor torac.html Servo Systems 9 Rotating Magnetic Field • Apply three-phase voltage to a three-phase stator winding creates a rotating field. -

Introduction
Introduction The Servo Trigger is a small board that helps you deploy hobby RC servo motors. When an external switch or logic signal changes state, the Servo Trigger tells an attached servo motor to move from position A to position B. The Servo Trigger in action. To use the Servo Trigger, you simply connect a hobby servo and a switch, then use the onboard potentiometers to adjust the start/stop positions and transition time. You can use a hobby servos in your projects without having to do any programming! In This Tutorial This hookup guide starts with some background information about hobby servo motors. From there, it jumps into getting the Servo Trigger working with a small servo, then examines some of the inner workings. Finally, for the adventurous, it explains how to customize the Servo Trigger by reprogramming it. Servo Motor Background In the most generic sense, a “servomechanism” (servo for short) is a device that uses feedback to achieve the desired result. Feedback control is used in many different disciplines, controlling parameters such as speed, position, and temperature. In the context we are discussing here, we are talking about hobby or radio-control servo motors. These are small motors primarily used for steering radio-controlled vehicles. Because the position is easily controllable, they are also useful for robotics and animatronics. However, they shouldn’t be confused with other types of servo motors, such as the large ones used in industrial machinery. An Assortment of Hobby Servos RC servos are reasonably standardized - they are all a similar shape, with mounting flanges at each end, available in graduated sizes. -

Selecting the Proper Cables for Your Stepper Or Servo System
Selecting the Proper Cables for Your Stepper or Servo System Kollmorgen 540-633-3545 [email protected] www.kollmorgen.com Engineers devote a lot of time and effort designing highly efficient, reliable, and economical stepper or servomotor positioning systems. They select a motor, a controller, appropriate feedback circuits, and an amplifier to satisfy the specific motion system’s needs. Unfortunately, however, the signal and power cables connecting the components are often neglected until the project is nearing its end or worse yet, handed off to an electrician who lacks the proper training. Overlooking critical cable selection factors can deliver a system with lower than expected accuracy, frequent failures, low immunity from electromagnetic interference, and adverse affects on neighboring equipment. BASIC CABLE CONSTRUCTION Cables are designed and manufactured with characteristics intended to service a specific application for peak performance. Each element in the basic cable construction plays a unique role. All cables contain some or all the following elements: single or multiple conductors of proper ampacity, insulation with appropriate voltage breakdown specifications, an overall shield or multiple shields for individual conductors or pairs, and a jacket to protect the cable from mechanical, chemical, and environmental influences. Additional cable elements might include a drain or grounding wire used with foil shields, binding tapes, embedded steel-support wires, and fillers to give the cable a uniform circular, cross- sectional shape. SELECTION CRITERION Cable selection begins with characterizing the operating conditions that affect the cable during service such as temperature, moisture, chemical exposure, abrasion, flexing, and expected life. The proper type and thickness of the insulation selected depends upon working voltages. -

Electrical Engineering Dictionary
ratio of the power per unit solid angle scat- tered in a specific direction of the power unit area in a plane wave incident on the scatterer R from a specified direction. RADHAZ radiation hazards to personnel as defined in ANSI/C95.1-1991 IEEE Stan- RS commonly used symbol for source dard Safety Levels with Respect to Human impedance. Exposure to Radio Frequency Electromag- netic Fields, 3 kHz to 300 GHz. RT commonly used symbol for transfor- mation ratio. radial basis function network a fully R-ALOHA See reservation ALOHA. connected feedforward network with a sin- gle hidden layer of neurons each of which RL Typical symbol for load resistance. computes a nonlinear decreasing function of the distance between its received input and Rabi frequency the characteristic cou- a “center point.” This function is generally pling strength between a near-resonant elec- bell-shaped and has a different center point tromagnetic field and two states of a quan- for each neuron. The center points and the tum mechanical system. For example, the widths of the bell shapes are learned from Rabi frequency of an electric dipole allowed training data. The input weights usually have transition is equal to µE/hbar, where µ is the fixed values and may be prescribed on the electric dipole moment and E is the maxi- basis of prior knowledge. The outputs have mum electric field amplitude. In a strongly linear characteristics, and their weights are driven 2-level system, the Rabi frequency is computed during training. equal to the rate at which population oscil- lates between the ground and excited states.