Power Processing, Part 1. Electric Machinery Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
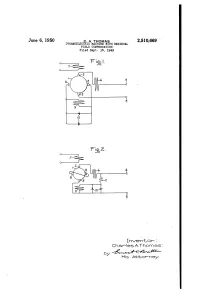
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Income? Bisone
INCOME? BISONE ED 179 392 SP 029 296 $ AUTHOR Hamilton, Howard B. TITLE Problem Manual for Power Processiug, Tart 1. Electric Machinery Analysis. ) ,INSTITUTION Pittsbutgh Univ., VA. 51'014 AGENCY National Science Foundation, Weeshingtcni D.C. PUB DATE -70 GRANT NSF-GY-4138 NOTE 40p.; For_related documents', see SE 029 295-298 EDRS PRICE MF01/BCO2 Plus Postage. DESCRIPTORS *College Science: Curriculum Develoimeft: Electricity: Electromechanical lacshnology;- Electfonics: *Engineering Educatiob: Higher Education: Instructional Materials: *Problem Solving; Science CourAes:,'Science Curriculum: Science . Eductttion; *Science Materials: Scientific Concepts AOSTRACT This publication was developed as aPortion/ofa . two-semester se4uence commencing t either the-sixth cr seVenth.term of the undergraduate program in electrical engineering at the University of Pittsburgh. The materials of tfie two courses, produced by' National Science Foundation grant, are concernedwitli power con ion systems comprising power electronic devices, electromechanical energy converters, and,associnted logic configurations necessary to cause the systlp to behave in a, prescrib,ed fashion. The erphasis in this portion of the'two course E` sequende (Part 1)is on electric machinery analysis.. 7his publication is-the problem manual for Part 1, which provide's problems included in 4, the first course. (HM) 4 Reproductions supplied by EDPS are the best that can be made from the original document. * **************************v******************************************** 2 -
Mandatory Disclosure Part-2
COLLEGE OF ENGINEERING AND TECHNOLOGY, BAMBHORI POST BOX NO. 94, JALGAON – 425001. (M.S.) NBA Accredited Website : www.sscoetjalgaon.ac.in Email : [email protected] Mandatory Disclosure Part-II November 2009 NORTH MAHARASHTRA UNIVERSITY, JALGAON STRUCTURE OF TEACHING AND EVALUATION S.E .(CIVIL ENGINEERING) First term Sr. Subject Teaching Scheme Examination Scheme No. Hours/week Paper Lectures Tutorial Practical Duration Paper TW PR OR Hours 1 Strength of Material 4 1 -- 3 100 25 -- -- 2 Surveying-I 4 -- 2 3 100 25 50 -- 3 Building Construction and 4 -- 4 3 100 25 -- 25 Materials 4 Concrete Technology 4 -- 2 3 100 25 -- 25 5 Engineering Mathematics- 4 1 -- 3 100 25 -- -- III 6 Computer Graphics -- -- 2 25 Total 20 2 10 -- 500 150 50 50 Grand Total 32 750 SECOND TERM Sr. Subject Teaching Scheme Hours/week Examination Scheme No. Paper Lectures Tutorial Practical Duration Paper TW PR OR Hours 1 Theory of Structures-I 4 1 -- 3 100 25 -- -- 2 Surveying-II 4 -- 2 3 100 25 50 -- 3 Building Design and 4 -- 4 4 100 50 -- 25 Drawing 4 Fluid Mechanics-I 4 1 2 3 100 25 -- 25 5 Engineering Geology 4 -- 2 3 100 25 -- -- 20 2 10 -- 500 15 50 50 0 Total Grand 32 750 Total NORTH MAHARASHTRA UNIVERSITY, JALGAON. SYLLABUS OF SECOND YEAR (CIVIL) TERM-IST (w.e.f. 2006-07) STRENGTH OF MATERIALS ---------------------------------------------------------------------------------------------------------------- Teaching Scheme: Examination Scheme: Lectures: 4 Hours/Week Theory Paper: 100 Marks(3 Hrs) Tutorials: 1 Hour/Week Term Work: 25 Marks ---------------------------------------------------------------------------------------------------------------- UNIT-I: ( 11 Hrs., 20 marks) Normal stress & strain, Hooke’s law. -
Classification of Transformers Family
TECHNOLOGY BASICS ABSTRACT Transformers are used in the electrical Classification of networks everywhere: in power plants, substations, industrial plants, buil- dings, data centres, railway vehicles, Transformers Family ships, wind turbines, in the electronic devices, the underground, and even 1. Introduction undersea. The focus of this article is on transformers applied in the trans- ransformers basically perform a of transformers in the most systematic way mission of energy, usually called pow- very simple function: they increase rather than elaborating on each type. er transformers. Due to very versatile Tor decrease voltage and current for requirements and restrictions in the the electric energy transmission. It is pre- The most important international orga- numerous applications, ranging from cisely stated what a transformer is in the nisations with focus on such transfor- a subsea transformer to a wind turbine International Electrotechnical Vocabula- mers are IEC1 through E14, its technical transformer, a small distribution trans- ry, Chapter 421: Power transformers and committee for the world standards; IEEE2 former to a large phase shifter trans- reactors [1]: through the Transformers Committee former, it is very difficult to organise a mainly for the American standards and structured overview of the transformer “A static piece of apparatus with two or CIGRE3 through the Study Committee types. Also, different companies sup- mo re windings which, by electromag- A2 Transformers which mainly produ- ply different markets and each have netic ind uction, transforms a system ces technical brochures and guidelines their own classification of the trans- of alterna ting voltage and current into on many subjects. Main standards for formers, which makes the transformer another system of voltage and current the transformers in question are the IEC family even more difficult to organise. -

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -

Alternator Winding Temperature Rise in Generator Systems
TM Information Sheet # 55 Alternator Winding Temperature Rise in Your Reliable Guide for Power Solutions Generator Systems 1.0 Introduction: When a wire carries electrical current, its temperature will increase due to the resistance of the wire. The factor that mostly influences/ limits the acceptable level of temperature rise is the insulation system employed in an alternator. So the hotter the wire, the shorter the life expectancy of the insulation and thus the alternator. This information sheets discusses how different applications influence temperature rise in alternator windings and classification standards are covered by the National electrical Manufacturers Association (NEMA). (Continued over) Table 1 - Maximum Temperature Rise (40°C Ambient) Continuous Temperature Rise Class A Class B Class F Class H Temp. Rise °C 60 80 105 125 Temp. Rise °F 108 144 189 225 Table 2 - Maximum Temperature Rise (40°C Ambient) Standby Temperature Rise Class A Class B Class F Class H Temp. Rise °C 85 105 130 150 Temp. Rise °F 153 189 234 270 Typical Windings Within a Generator Set’s Alternator Excitor windings Stator windings Rotor windings To fulfill our commitment to be the leading supplier and preferred service provider in the Power Generation Industry, the Clifford Power Systems, Inc. team maintains up-to-date technology and information standards on Power Industry changes, regulations and trends. As a service, our Information Sheets are circulated on a regular basis, to existing and potential Power Customers to maintain awareness of changes and -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -

Academic Regulations, Course Structure and Detailed Syllabus
ACADEMIC REGULATIONS, COURSE STRUCTURE AND DETAILED SYLLABUS M.Tech (POWER ELECTRONICS AND ELECTRIC DRIVES) FOR MASTER OF TECHNOLOGY TWO YEAR POST GRADUATE COURSE (Applicable for the batches admitted from 2014-2015) R14 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) SCHOOL OF ENGINEERING Venkatapur, Ghatkesar, Hyderabad – 500088 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) M.TECH. (POWER ELECTRONICS AND ELECTRIC DRIVES) I YEAR - I SEMESTER COURSE STRUCTURE AND SYLLUBUS Subject Code Subject L P Credits A31058 Machine Modeling& Analysis 3 0 3 A31059 Power Electronic Converters-I 3 0 3 A31024 Modern Control Theory 3 0 3 A31060 Power Electronic Control of DC Drives 3 0 3 Elective-I 3 0 3 A31029 HVDC Transmission A31061 Operations Research A31062 Embedded Systems Elective-II A31027 Microcontrollers and Applications 3 0 3 A31063 Programmable Logic Controllers and their Applications A31064 Special Machines A31213 Power Converters Lab 0 3 2 A31214 Seminar - - 2 Total 18 3 22 I YEAR - II SEMESTER Subject Subject L P Credits Code A32058 Power Electronic Converters-II 3 0 3 A32059 Power Electronic Control of AC Drives 3 0 3 A32022 Flexible AC Transmission Systems (FACTS) 3 0 3 A32060 Neural Networks and Fuzzy Systems 3 0 3 Elective-III A32061 Digital Control Systems 3 0 3 A32062 Power Quality A32063 Advanced Digital Signal Processing Elective-IV A32064 Dynamics of Electrical Machines A32065 High-Frequency Magnetic Components A32066 3 0 3 Renewable Energy Systems A32213 Electrical Systems Simulation Lab 0 3 2 A32214 Seminar-II - - 2 Total 18 3 22 II YEAR – I SEMESTER Code Subject L P Credits A33219 Comprehensive Viva-Voce - - 2 A33220 Project Seminar 0 3 2 A33221 Project Work Part-I - - 18 Total Credits - 3 22 II YEAR – II SEMESTER Code Subject L P Credits A34207 Project Work Part-II and Seminar - - 22 Total - - 22 L P C M. -

Power Management Consortium (PMC) Nuggets
CPES ANNUAL REPORT 2020 103 Power Management Consortium (PMC) Nuggets 104 Low Loss Integrated Inductor and Transformer Structure and Application 114 Design Optimization of an Unregulated LLC Converter with Integrated in Regulated LLC Converter for 48 V Bus Converter Magnetics for a Two-Stage, 48 V VRM 105 Magnetic Integration of Matrix Transformer with a Highly Controllable 115 Wide-Voltage Range, High-Efficiency Sigma Converter 48 V VRM with Leakage Inductance Integrated Magnetics 106 Control Technique for CRM-Based, High-Frequency, 116 Modeling and Control for a 48 V/1 V Sigma Converter for Very Fast Soft-Switching Three-Phase Inverter Under Grid Fault Condition Transient Response 107 Critical Conduction Mode-Based, High-Frequency, Single-Phase 117 A Two-Stage Rail Grade DC-DC Converter Based on a GaN Device Transformerless PV Inverter 118 Design-Oriented Equivalent Circuit Model for Resonant Converters 108 Transmitter Coil Design for Free-Positioning Omnidirectional Wireless 119 Critical-Conduction-Mode-Based Soft-Switching Modulation for Three- Power Transfer System Phase PV Inverters with Reactive Power Transfer Capability 109 Shielding Study of a 6.78 MHz Omnidirectional Wireless Power Transfer 120 Improved Three-Phase Critical-Mode-Based Soft-Switching Modulation System Technique with Low Leakage Current for PV Inverter Application 110 The LCCL-LC Resonant Converter and Its Soft Switching Realization for 121 Balance Technique for CM Noise Reduction in Critical-Mode-Based Three- Omnidirectional Wireless Power Transfer Systems Phase -

Fall 2011 Meeting Minutes Boston MA November 3,2011
IEEE/PES Transformers Committee Fall 2011 Meeting Minutes Boston MA November 3,2011 Unapproved IEEE/PES Transformers Committee Meeting Fall 2011 Boston MA Committee Members and Guests Registered for the Spring 2011 Meeting Albers, Timothy: II Bertolini, Edward: AP - LM Campbell, James: II Allaway, Dave: II Berube, Jean-Noel: II Carlos, Arnaldo: AP Allaway, Marcene: SP Betancourt, Enrique: CM Caronia, Paul: II Allen, Jerry: AP Bhatia, Paramjit: II Caskey, John: AP Allen, Abbey: II Binder, Wallace: CM Caskey, Melissa: G Alton, Henry: II Bishop Jr, Wayne: II Castellanos, Juan: CM Amos, Richard: CM Bishop, Cherie: SP Castillo, Alonso: II Amos, Norann: SP Blackburn, Gene: CM Castillo, Karla: SP Anderson, Gregory: CM Blackburn, Martha: SP Chadderdon, Philip: II Anderson, Jeffrey: II Blackmon, Jr., James: AP Cheim, Luiz: AP Angell, Don: AP Blackmon, Donna: SP Cherry, Donald: CM Ansari, Tauhid: AP Blaydon, Daniel: CM Chiodo, Vincent: II Anthony, Stephen: II Boettger, William: CM Chisholm, Paul: AP Antosz, Stephen: CM Boettger, Pat: SP Chiu, Bill: CM Armstrong, James: AP Bolliger, Alain: AP Lu, Minnie: SP Arpino, Carlo: CM Bolliger, Dominique: SP Chmiel, Frank: AP Arpino, Tina: SP Boman, Paul: CM Choinski, Scott: AP Asano, Roberto: AP Borowitz, James: II Bartholomew, Kathy: SP Atef, Kahveh: II Botti, Michael: II Christodoulou, Larry: II Averitt, Ralph: II Botti, Nicole: SP Chrobak, John: II Ayers, Donald: CM Bozich, Bradford: II Chu, Donald: CM Bae, Yongbae: II Bradford, Ira: II Claiborne, C. Clair: CM Ballard, Jay: AP Brady, Ryan: II Cocchiarale, -
LECTURE NOTES on Utilization of Electrical Energy & Traction
LECTURE NOTES ON Utilization of Electrical Energy & Traction Name of the course: Diploma in Electrical Engineering. (6th Semester) Notes Prepared by: HIMANSU BHUSAN BEHERA Designation : LECTURER IN ELECTRICAL College : UTKALMANI GOPABANDHU INSTITUTE OF ENGINEERING, ROURKELA CHAPTER-1 ELECTROLYSIS Definition and Basic principle of Electro Deposition. Electro deposition is the process of coating a thin layer of one metal on top of different metal to modify its surface properties. It is done to achieve the desire electrical and corrosion resistance, reduce wear &friction, improve heat tolerance and for decoration. Electroplating Basics Fig-1. Electrochemical Plating Figure- 1, schematically illustrates a simple electrochemical plating system. The ―electro‖ part of the system includes the voltage/current source and the electrodes, anode and cathode, immersed in the ―chemical‖ part of the system, the electrolyte or plating bath, with the circuit being completed by the flow of ions from the plating bath to the electrodes. The metal to be deposited may be the anode and be ionized and go into solution in the electrolyte, or come from the composition of the plating bath. Copper, tin, silver and nickel metal usually comes from anodes, while gold salts are usually added to the plating bath in a controlled process to maintain the composition of the bath. The plating bath generally contains other ions to facilitate current flow between the electrodes. The deposition of metal takes place at the cathode. The overall plating process occurs in the following sequence: 1. Power supply pumps electrons into the cathode. 2. An electron from the cathode transfers to a positively charged metal ion in the solution and the reduced metal plates onto the cathode.