Modeling, Analogue and Tests of an Electric Machine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
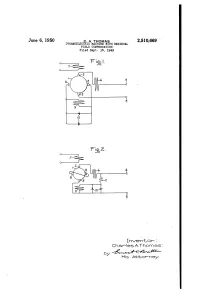
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -

Electrical Machines Lab Ii
Electrical & Electronics Engineering Department BRCM COLLEGE OF ENGINEERING & TECHNOLOGY BAHAL – 127028 ( Distt. Bhiwani ) Haryana, India ELECTRICAL MACHINES LAB II EE-327-F ELECTRICAL MACHINES-II LAB L T P CLASS WORK : 25 Marks 0 0 2 EXAM : 25 Marks TOTAL : 50 Marks DURATION OF EXAM : 3 HRS List of Experiments: 1. Study of the No Load and Block Rotor Test in a Three Phase Slip Ring Induction Motor & draw its circle diagram 2. To Study the Starting of Slip Ring Induction Motor by Rotor Resistance Starter. 3. To Study and Measure Direct and Quadrature Axis Reactance of a 3 phase alternator by Slip Test 4. To Study and Measure Positive, Negative and Zero Sequence Impedance of a Alternator 5. To Study and Measure Synchronous Impedance and Short circuit ratio of Synchronous Generator. 6. Study of Power (Load) sharing between two Three Phase alternators in parallel operation condition 7. Synchronization of two Three Phase Alternators, by a) Synchroscope Method b) Three dark lamp Method c) Two bright one dark lamp Method 8. To plot V- Curve of synchronous motor. 7. To study and verify Load characteristics of Long Shunt & short shunt Commutatively Compound Generator using 3 phase induction motor as prime mover. 10. To perform O.C. test on synchronous generator. And determine the full load regulation of a three phase synchronous generator by synchronous impedance method NOTE: At least 10 experiments are to be performed, with at least 7 from above list, remaining three may either be performed from above list or designed & set by concerned institution as per scope of syllabus. -

FOR PREDICTING INIJJ'c'l'ion MOTOR CHARACTERISTICS I
AN IMPROVED METHOD FOR PREDICTING INIJJ'C'l'ION MOTOR CHARACTERISTICS i AN D ROVED FOR REDICTlNG llTDUC'l'ION MOTO CHA.RAOTERIBT'IOS I' Bachelor of Science :Montana State College BOZtX!lM , , onto.na 1944 j;;)u.bmitt to tho De artnont of leotricnl EngiMeri g Cklaho J..gricultur and rcohenieul College In purtiul Ful.:f'illmen'l; of t e Re0ui ents tor the gree of' STER OF ..:>C ~en 1947 ii OKY.l~fl:\H .1:J:?RO D BY: !GIUCrL TFP..U i M' nwrn· 11, c·m 1, L J B R ,\ • v . DE'C 8 1947 llea! of £fie bepartiii.ent ') r ·> P , .... I ) ~ ~1 J . iii PREFiVJE The induction motor is one o.. f' the most u.se:tul · electrie maohines in industry today. Since its inverrtion in 1888 by !'Jikola Telsa, it has eonstantl;r bee:n replacing other types of machines, both eleotrio .ru1.d meehanieal, as a raeans of supply ing 111sehanioal po;:er. Ma.de in its diversified for.ID1J,. an induction riaotor et:.m be made t;.o fit a.lm.ost any torq_ue-speed requirement. In its most common form., the normal-starting-current. normal-starting-torque, squirrel-cage induction motor., it offers such a.dvantae;es as high effioiency:t practioally constant speed, extremely sirn.plo ope:rationt a11d s:m.s.11 electrical na.intenance requirements. Because e:f the induction moto~•s wide use, it is advantageous to both the roanu:faoturer and the consumer to be able to ascertain, as aoeurately and si:Ll1ply as possible, hmv a given motor vrill operate under varying eondi tions of load. -

Course Description Bachelor of Technology (Electrical Engineering)
COURSE DESCRIPTION BACHELOR OF TECHNOLOGY (ELECTRICAL ENGINEERING) COLLEGE OF TECHNOLOGY AND ENGINEERING MAHARANA PRATAP UNIVERSITY OF AGRICULTURE AND TECHNOLOGY UDAIPUR (RAJASTHAN) SECOND YEAR (SEMESTER-I) BS 211 (All Branches) MATHEMATICS – III Cr. Hrs. 3 (3 + 0) L T P Credit 3 0 0 Hours 3 0 0 COURSE OUTCOME - CO1: Understand the need of numerical method for solving mathematical equations of various engineering problems., CO2: Provide interpolation techniques which are useful in analyzing the data that is in the form of unknown functionCO3: Discuss numerical integration and differentiation and solving problems which cannot be solved by conventional methods.CO4: Discuss the need of Laplace transform to convert systems from time to frequency domains and to understand application and working of Laplace transformations. UNIT-I Interpolation: Finite differences, various difference operators and theirrelationships, factorial notation. Interpolation with equal intervals;Newton’s forward and backward interpolation formulae, Lagrange’sinterpolation formula for unequal intervals. UNIT-II Gauss forward and backward interpolation formulae, Stirling’s andBessel’s central difference interpolation formulae. Numerical Differentiation: Numerical differentiation based on Newton’sforward and backward, Gauss forward and backward interpolation formulae. UNIT-III Numerical Integration: Numerical integration by Trapezoidal, Simpson’s rule. Numerical Solutions of Ordinary Differential Equations: Picard’s method,Taylor’s series method, Euler’s method, modified -

Power Processing, Part 1. Electric Machinery Analysis
DOCONEIT MORE BD 179 391 SE 029 295,. a 'AUTHOR Hamilton, Howard B. :TITLE Power Processing, Part 1.Electic Machinery Analyiis. ) INSTITUTION Pittsburgh Onii., Pa. SPONS AGENCY National Science Foundation, Washingtcn, PUB DATE 70 GRANT NSF-GY-4138 NOTE 4913.; For related documents, see SE 029 296-298 n EDRS PRICE MF01/PC10 PusiPostage. DESCRIPTORS *College Science; Ciirriculum Develoiment; ElectricityrFlectrOmechanical lechnology: Electronics; *Fagineering.Education; Higher Education;,Instructional'Materials; *Science Courses; Science Curiiculum:.*Science Education; *Science Materials; SCientific Concepts ABSTRACT A This publication was developed as aportion of a two-semester sequence commeicing ateither the sixth cr'seventh term of,the undergraduate program inelectrical engineering at the University of Pittsburgh. The materials of thetwo courses, produced by a ional Science Foundation grant, are concernedwith power convrs systems comprising power electronicdevices, electrouthchanical energy converters, and associated,logic Configurations necessary to cause the system to behave in a prescribed fashion. The emphisis in this portionof the two course sequence (Part 1)is on electric machinery analysis. lechnigues app;icable'to electric machines under dynamicconditions are anallzed. This publication consists of sevenchapters which cW-al with: (1) basic principles: (2) elementary concept of torqueand geherated voltage; (3)tile generalized machine;(4i direct current (7) macrimes; (5) cross field machines;(6),synchronous machines; and polyphase -

TRUET Bo THOMPSON \'• Bachelor of Science Louisiana Poiytechnic Institute 1948
i SOME ASPECTS OF SINGLE PH.A.SE INDUCTION MOTOR THEORY By TRUET Bo THOMPSON \'• Bachelor of Science Louisiana Poiytechnic Institute 1948. Submitted to ·the Faculty of the Graduate School of the Oklahoma Agricultural and Mechanical College in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE 1950 ii SOME ASPECTS OF SINGLE PHASE INDUCTION MOTOR THEORY ' TRUET Bo THOMPSON MASTER OF SCIENCE 1950 THESIS AND ABSTRACT APPROVED: FacultYi~~ De~f!ue Graduate School 266841 iii PREFACE For more than 50 years the two distinct theories of single phase motor operation, the cross-field theory and the double revolving field theory, have been used to explain the charac teristics of these motors. Neither is entirely satisfactory either in its calculation of characteristics or in the physical conception of the motor's operation. The complexity and actual mystery involved have defied through this half century efforts to si~lify and correlate completely the theories now extant. This paper is designed, not to perform this task, nor to develop a new concept, but rather to bring together a· few ideas which have been helpful in the work which was carried on in the belief that there can be a more satisfactory explanation of single phase moto~ operation. iv ACKNOWLEDGMENT The writer wishes to express his sincere appreciation to Professor C& Fo Cameron for his encouragement, his reading of this material and his many helpful suggestions concerning it., V TABLE OF CONTENTS CHA PTER I. • • • • • • • . • . 1 The Double Revolving Field. • . • ••••. 1 Two Oppositely Rotating Fields in a Single Stator. • • 13 Two Oppositely Rotating Fields in Two Stators • • • • • 25 Mathematical Development by Equivalent Circuit •• • • • 29 Another Approach to Performance Equations . -
In a Mechanical System, a Differential
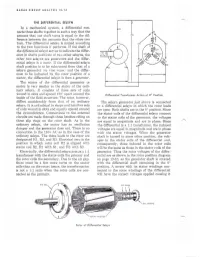
RADAR CIRCUIT ANALYSIS 13-14 THE DIFFERENTIAL SElSYN In a mechanical system, a differential con- 52 nects three shafts together in such a way that the amount that one shaft turns is equal to the dif- zsv ference between the amounts that the other two turn. The differential selsyn is named according to the two functions it performs. If the shaft of the differential selsyn serves to indicate the differ- ence in shafts positions of two other selsyns, the other two selsyns are generators and the differ- ential selsyn is a motor. If the differential selsyn shaft position is to be subtracted from that of a 53 selsyn generator (or vice versa) and the differ- ence to be indicated by the rotor position of a i----OV---o-i motor, the differential selsyn is then a generator. ~---OV--~~_-4 ~ The stator of the differential generator or motor is very similar to the stator of the ordi- nary selsyn. It consists of three sets of coils 0 wound in slots and spaced 120 apart around the Differential Transformer Action at 0° Position inside of the field structure. The rotor, however, differs considerably from that of an ordinary The selsyn generator just above is connected selsyn. It is cylindrical in shape and has three sets to a differential selsyn in which the rotor leads of coils wound in slots and equally spaced around are open. Both shafts are in the 0° position. Since the circumference. Connections to the external the stator coils of the differential selsyn connect circuits are made through three brushes riding on to the stator coils of the generator, the voltages three slip rings on the rotor shaft. -
Massachusetts Institute of Technology 1 Introduction 2 Electric Machine
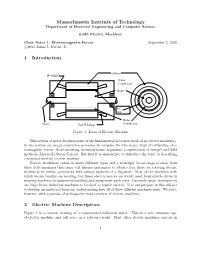
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.685 Electric Machines Class Notes 1: Electromagnetic Forces September 5, 2005 c 2003 James L. Kirtley Jr. 1 Introduction Stator Bearings Stator Conductors Rotor Air Gap Rotor Shaft End Windings Conductors Figure 1: Form of Electric Machine This section of notes discusses some of the fundamental processes involved in electric machinery. In the section on energy conversion processes we examine the two major ways of estimating elec- tromagnetic forces: those involving thermodynamic arguments (conservation of energy) and field methods (Maxwell’s Stress Tensor). But first it is appropriate to introduce the topic by describing a notional rotating electric machine. Electric machinery comes in many different types and a strikingly broad range of sizes, from those little machines that cause cell ’phones and pagers to vibrate (yes, those are rotating electric machines) to turbine generators with ratings upwards of a Gigawatt. Most of the machines with which we are familiar are rotating, but linear electric motors are widely used, from shuttle drives in weaving machines to equipment handling and amusement park rides. Currently under development are large linear induction machines to be used to launch aircraft. It is our purpose in this subject to develop an analytical basis for understanding how all of these different machines work. We start, however, with a picture of perhaps the most common of electric machines. 2 Electric Machine Description: Figure 1 is a cartoon drawing of a conventional induction motor. This is a very common type of electric machine and will serve as a reference point. -

SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit
Subject Code : SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit – I: DC Generators and Motors DC Generators : Types of generators – Series wound generator – Separately excited generator – Shunt wound generator – Condition for self excitation – Compound wound generator – Efficiency of DC machines. DC Motors: Back e.m.f. – Speed of a DC motor – Condition for maximum power – Armature reaction and commutation – Characteristics of D.C. motors – Motor starters – Speed control of D.C. motor. Unit – II - Transformers Transformer – Construction – Transformation ratio – Primary – No load current – Transformer on load – Effect of resistance – Equivalent circuit of static transformer – Testing of transformers – Use of transformers with measuring instruments. Unit – III: Electronic Control of AC Motors. Instability of AC motors – Variable speed induction motor drives – Torque speed characteristics of induction motors – Inverters for driving the motor – Speed control of induction motor by variable voltage - fixed frequency supply – Synchronous motor control. Unit – IV: Alternator and Amplidyne. Alternator – Construction – Operation – Frequency - Pitch factor and distribution factor – E.M.F. equation of alternator. Amplidyne – Amplification factor – Use of amplidyne in control – Amplidyne for control of voltage – Amplidyne for control of current. Unit – V: Industrial Timing Circuits. Introduction – Constituents of Industrial timing circuits – classification of timers – Thermal timers – Electro mechanical timers – Electronic timers – Classification of electronic timers – RC timing elements – Time base generators – SCR delay timer – IC electronic timer. Books for Study: 1. Industrial Electronics – G.K. Mithal – Khanna Publishers – Delhi – 15 th edition – 1992. 2. Electrical Technology – H. Cotton – CBS Publishers – Delhi. Books for References: 1. Electrical Technology – B.L. Theraja, A.K. Theraja – NIRJA construction and Development Co(p) Ltd. -

Evaluating the Effects of Electric and Magnetic Loading on the Performance of Single and Double Rotor Axial Flux PM Machines
University of Kentucky UKnowledge Power and Energy Institute of Kentucky Faculty Publications Power and Energy Institute of Kentucky 4-1-2020 Evaluating the Effects of Electric and Magnetic Loading on the Performance of Single and Double Rotor Axial Flux PM Machines Narges Taran University of Kentucky, [email protected] Greg Heins Regal Beloit Corporation, Australia Vandana Rallabandi University of Kentucky, [email protected] Dean Patterson Regal Beloit Corporation, Australia Dan M. Ionel University of Kentucky, [email protected] Follow this and additional works at: https://uknowledge.uky.edu/peik_facpub Part of the Electromagnetics and Photonics Commons, and the Power and Energy Commons Right click to open a feedback form in a new tab to let us know how this document benefits ou.y Repository Citation Taran, Narges; Heins, Greg; Rallabandi, Vandana; Patterson, Dean; and Ionel, Dan M., "Evaluating the Effects of Electric and Magnetic Loading on the Performance of Single and Double Rotor Axial Flux PM Machines" (2020). Power and Energy Institute of Kentucky Faculty Publications. 5. https://uknowledge.uky.edu/peik_facpub/5 This Article is brought to you for free and open access by the Power and Energy Institute of Kentucky at UKnowledge. It has been accepted for inclusion in Power and Energy Institute of Kentucky Faculty Publications by an authorized administrator of UKnowledge. For more information, please contact [email protected]. Evaluating the Effects of Electric and Magnetic Loading on the Performance of Single and Double Rotor Axial Flux PM Machines Digital Object Identifier (DOI) https://doi.org/10.1109/TIA.2020.2983632 Notes/Citation Information Published in IEEE Transactions on Industry Applications.