A Comparitve Study Between Vector Control and Direct Torque Control of Induction Motor Using Matlab Simulink
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
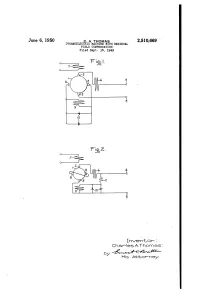
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -

Naval Postgraduate School
NPS-97-06-003 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA SHIP ANTI BALLISTIC MISSILE RESPONSE (SABR) by LT Allen P. Johnson LT David C. Leiker LT Bryan Breeden ENS Parker Carlisle LT Willard Earl Duff ENS Michael Diersing LT Paul F. Fischer ENS Ryan Devlin LT Nathan Hornback ENS Christopher Glenn TDSI Students LT Chris Hoffmeister, USN LT John Kelly, USN LTC Tay Boon Chong, SAF LTC Yap Kwee Chye, SAF MAJ Phang Nyit Sing, SAF CPT Low Wee Meng, SAF CPT Ang Keng-ern, SAF CPT Ohad Berman, IDF Mr. Fann Chee Meng, DSTA, Singapore Mr. Chin Chee Kian, DSTA, Singapore Mr. Yeo Jiunn Wah, DSTA, Singapore June 2006 Approved for public release; distribution is unlimited. Prepared for: Deputy Chief of Naval Operations for Warfare Requirements and Programs (OPNAV N7), 2000 Navy Pentagon, Rm. 4E392, Washington, D.C. 20350-2000 THIS PAGE INTENTIONALLY LEFT BLANK REPORT DOCUMENTATION PAGE Form Approved OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instruction, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188) Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. -

Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 the Mighty Railgun I. Abstract the Idea of This Project Is to Build a Railgun
Lyall Cooper Dr. Dann ASR – D Block 10 May 2012 The Mighty Railgun (All Bark no Bite) I. Abstract The idea of this project is to build a railgun capable of firing a small metal projectile at substantial velocity. The original plan was to build iterative prototypes capable of firing small projectiles, and using them to figure out the ideal design for the final version, but the smaller versions were not very successful due to their relative lack of power, so it was difficult to use them to learn what to do. The final, largest scale railgun is powered by a bank of capacitors with an equivalent capacitance of 24.6mF charged to around 350V. This produces 3013.5J of energy discharged over approximately 58.75 µs (it varies for each firing), drawing a peak of about 1425A when firing a projectile (it once again varies) and about 1600A when not firing a projectile (short circuiting the rails). The railgun is capable of consistently firing a small piece of metal (usually aluminum or copper); however the projectile does not usually travel very far, although this is hard to measure due to the nature of the gun and the speed at which the firing takes place. II. Introduction Electricity is often seemingly mysterious, but we have come to accept and understand how through the interaction of electric and magnetic fields we can create a simple motor, as we did in the first semester. A railgun is just a linear electric motor, at very high speeds. What makes it different, however, is that it uses neither magnets nor coils of wire, and relies entirely on the induced magnetic field in the rails due to the extremely large current to produce a Lorentz Force to propel the projectile (which will be discussed in greater depth in the theory section). -

Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator Under Various Discrete Interleaving Carriers
electronics Article Evaluation of Direct Torque Control with a Constant-Frequency Torque Regulator under Various Discrete Interleaving Carriers Ibrahim Mohd Alsofyani and Kyo-Beum Lee * Department of Electrical and Computer Engineering, Ajou University, 206, World cup-ro, Yeongtong-gu Suwon 16499, Korea * Correspondence: [email protected]; Tel.: +82-31-219-2376 Received: 25 June 2019; Accepted: 20 July 2019; Published: 23 July 2019 Abstract: Constant-frequency torque regulator–based direct torque control (CFTR-DTC) provides an attractive and powerful control strategy for induction and permanent-magnet motors. However, this scheme has two major issues: A sector-flux droop at low speed and poor torque dynamic performance. To improve the performance of this control method, interleaving triangular carriers are used to replace the single carrier in the CFTR controller to increase the duty voltage cycles and reduce the flux droop. However, this method causes an increase in the motor torque ripple. Hence, in this work, different discrete steps when generating the interleaving carriers in CFTR-DTC of an induction machine are compared. The comparison involves the investigation of the torque dynamic performance and torque and stator flux ripples. The effectiveness of the proposed CFTR-DTC with various discrete interleaving-carriers is validated through simulation and experimental results. Keywords: constant-frequency torque regulator; direct torque control; flux regulation; induction motor; interleaving carriers; low-speed operation 1. Introduction There are two well-established control strategies for high-performance motor drives: Field orientation control (FOC) and direct torque control (DTC) [1–3]. The FOC method has received wide acceptance in industry [4]. Nevertheless, it is complex because of the requirement for two proportional-integral (PI) regulators, space-vector modulation (SVM), and frame transformation, which also needs the installation of a high-resolution speed encoder. -

An Introductory Electric Motors and Generators Experiment for a Sophomore Level Circuits Course
AC 2008-310: AN INTRODUCTORY ELECTRIC MOTORS AND GENERATORS EXPERIMENT FOR A SOPHOMORE-LEVEL CIRCUITS COURSE Thomas Schubert, University of San Diego Thomas F. Schubert, Jr. received his B.S., M.S., and Ph.D. degrees in electrical engineering from the University of California, Irvine, Irvine CA in 1968, 1969 and 1972 respectively. He is currently a Professor of electrical engineering at the University of San Diego, San Diego, CA and came there as a founding member of the engineering faculty in 1987. He previously served on the electrical engineering faculty at the University of Portland, Portland OR and Portland State University, Portland OR and on the engineering staff at Hughes Aircraft Company, Los Angeles, CA. Prof. Schubert is a member of IEEE and ASEE and is a registered professional engineer in Oregon. He currently serves as the faculty advisor for the Kappa Eta chapter of Eta Kappa Nu at the University of San Diego. Frank Jacobitz, University of San Diego Frank G. Jacobitz was born in Göttingen, Germany in 1968. He received his Diploma in physics from the Georg-August Universität, Göttingen, Germany in 1993, as well as M.S. and Ph.D. degrees in mechanical engineering from the University of California, San Diego, La Jolla, CA in 1995 and 1998, respectively. He is currently an Associate Professor of mechanical engineering at the University of San Diego, San Diego, CA since 2003. From 1998 to 2003, he was an Assistant Professor of mechanical engineering at the University of California, Riverside, Riverside, CA. He has also been a visitor with the Centre National de la Recherche Scientifique at the Université de Provence (Aix-Marseille I), France. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages. -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -

An Engineering Guide to Soft Starters
An Engineering Guide to Soft Starters Contents 1 Introduction 1.1 General 1.2 Benefits of soft starters 1.3 Typical Applications 1.4 Different motor starting methods 1.5 What is the minimum start current with a soft starter? 1.6 Are all three phase soft starters the same? 2 Soft Start and Soft Stop Methods 2.1 Soft Start Methods 2.2 Stop Methods 2.3 Jog 3 Choosing Soft Starters 3.1 Three step process 3.2 Step 1 - Starter selection 3.3 Step 2 - Application selection 3.4 Step 3 - Starter sizing 3.5 AC53a Utilisation Code 3.6 AC53b Utilisation Code 3.7 Typical Motor FLCs 4 Applying Soft Starters/System Design 4.1 Do I need to use a main contactor? 4.2 What are bypass contactors? 4.3 What is an inside delta connection? 4.4 How do I replace a star/delta starter with a soft starter? 4.5 How do I use power factor correction with soft starters? 4.6 How do I ensure Type 1 circuit protection? 4.7 How do I ensure Type 2 circuit protection? 4.8 How do I select cable when installing a soft starter? 4.9 What is the maximum length of cable run between a soft starter and the motor? 4.10 How do two-speed motors work and can I use a soft starter to control them? 4.11 Can one soft starter control multiple motors separately for sequential starting? 4.12 Can one soft starter control multiple motors for parallel starting? 4.13 Can slip-ring motors be started with a soft starter? 4.14 Can soft starters reverse the motor direction? 4.15 What is the minimum start current with a soft starter? 4.16 Can soft starters control an already rotating motor (flying load)? 4.17 Brake 4.18 What is soft braking and how is it used? 5 Digistart Soft Starter Selection 5.1 Three step process 5.2 Starter selection 5.3 Application selection 5.4 Starter sizing 1. -

Improved Direct Torque Control of Doubly Fed Induction Motor Using Space Vector Modulation
Received: December 22, 2020. Revised: February 26, 2021. 177 Improved Direct Torque Control of Doubly Fed Induction Motor Using Space Vector Modulation Mohammed El Mahfoud1* Badre Bossoufi1 Najib El Ouanjli2 Mahfoud Said2 Mohammed Taoussi2 1Laboratory of engineering Modeling and Systems Analysis, SMBA University Fez, Morocco 2Technologies and Industrial Services Laboratory, SMBA University Fez, Morocco * Corresponding author’s Email: [email protected] Abstract: This research paper deals with the improved direct torque control (DTC) of a doubly fed induction machine (DFIM) operating in motor mode. The conventional DTC is a powerful tool to ensure robustness and good torque dynamics. However, the variable switching frequency as well as the presence of torque and flux ripples due to the use of hysteresis controllers are the major drawbacks of this strategy. For this purpose, the control by space vector Modulation (SVM) is developed to improve DTC performance, by replacing hysterisis controllers by PI controllers to reduce electromagnetic flux ripple and torque ripple in order to minimize mechanical vibration and acoustic noise while maintaining the benefits of DTC control. The proposed control algorithm is simulated and tested in MATLAB/Simulink. A comparative analysis between this technique and conventional DTC is carried out, highlighting the efficiency of the proposed improvement approach. The performance indexes and comparative results show the effectiveness of the proposed control in reducing torque ripple and stator and rotor flux ripple by up to 43%, 42% and 31%, respectively, resulting in Total Harmonic Distortion (THD%) 61% lower, in addition the switching frequency is controlled, and the Rejection Time is improved by more than 76%. -

Direct Torque Control of Induction Motor Using Fuzzy Logic Controller
International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 3, Issue 2 (January 2014), PP.56-61 Direct Torque Control of Induction Motor Using Fuzzy Logic Controller 1 2 C.Vignesh, S.Shantha Sheela, 3 4 E.Chidam Meenakchi Devi, R.Balachandar 1,2,3,4 M.E Power Electronics and Drives, Sri Subramanya college of Engineering and Technology,India Abstract:- In this paper, Direct Torque Control (DTC) approaches of induction motor (IM) drives has been proposed and it is extensively implemented in industrial variable speed applications. This paper presents a unique direct torque control (DTC) approach for induction motor (IM) drives fed by using a fuzzy logic controller. The intention is to develop a low-ripple high-performance induction motor (IM) drive. The presented scheme is founded on the emulation of the operation of the conservative six switch three-phase inverter. It routines the dc current to re-construct the stator currents desired to estimate the motor flux and the electromagnetic torque. This methodology has been adopted in the design of the vector selection table of the suggested DTC approach through fuzzy logic controller. The modelling and simulation results of direct torque control of induction motor have been confirmed by means of the software package MATLAB/Simulink. Keywords:- Direct Torque Control, Fuzzy Logic Controller, Induction Motor, Direct Torque Control Fed Induction Motor. I. INTRODUCTION For high power industrial applications it is desirable to use AC motor drive instead of DC drive. But due to inherent torque coupling present in AC motor, the dynamic response becomes sluggish. -

Vector Control of an Induction Motor Based on a DSP
Vector Control of an Induction Motor based on a DSP Master of Science Thesis QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN © QIAN CHENG LEI YUAN, 2011. Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology SE–412 96 G¨oteborg Sweden Telephone +46 (0)31–772 1000 Chalmers Bibliotek, Reproservice G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology Abstract In this thesis project, a vector control system for an induction motor is implemented on an evaluation board. By comparing the pros and cons of eight candidates of evaluation boards, the TMS320F28335 DSP Experimenter Kit is selected as the digital controller of the vector control system. Necessary peripheral and interface circuits are built for the signal measurement, the three-phase inverter control and the system protection. These circuits work appropriately except that the conditioning circuit for analog-to-digital con- version contains too much noise. At the stage of the control algorithm design, the designed vector control system is simulated in Matlab/Simulink with both S-function and Simulink blocks. The simulation results meet the design specifications well.