Total No. of Printed Pages:03 SUBJECT CODE NO
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Income? Bisone
INCOME? BISONE ED 179 392 SP 029 296 $ AUTHOR Hamilton, Howard B. TITLE Problem Manual for Power Processiug, Tart 1. Electric Machinery Analysis. ) ,INSTITUTION Pittsbutgh Univ., VA. 51'014 AGENCY National Science Foundation, Weeshingtcni D.C. PUB DATE -70 GRANT NSF-GY-4138 NOTE 40p.; For_related documents', see SE 029 295-298 EDRS PRICE MF01/BCO2 Plus Postage. DESCRIPTORS *College Science: Curriculum Develoimeft: Electricity: Electromechanical lacshnology;- Electfonics: *Engineering Educatiob: Higher Education: Instructional Materials: *Problem Solving; Science CourAes:,'Science Curriculum: Science . Eductttion; *Science Materials: Scientific Concepts AOSTRACT This publication was developed as aPortion/ofa . two-semester se4uence commencing t either the-sixth cr seVenth.term of the undergraduate program in electrical engineering at the University of Pittsburgh. The materials of tfie two courses, produced by' National Science Foundation grant, are concernedwitli power con ion systems comprising power electronic devices, electromechanical energy converters, and,associnted logic configurations necessary to cause the systlp to behave in a, prescrib,ed fashion. The erphasis in this portion of the'two course E` sequende (Part 1)is on electric machinery analysis.. 7his publication is-the problem manual for Part 1, which provide's problems included in 4, the first course. (HM) 4 Reproductions supplied by EDPS are the best that can be made from the original document. * **************************v******************************************** 2 -

Stepper Motor Or Servo Motor: Which Should It Be?
Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL ENGINEER THE EXCEPTIONAL Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL Each technology has its niche, and since the selection of either stepper or servo ENGINEER THE EXCEPTIONAL technology affects the likelihood of success, it is important that the machine designer consider the technical advantages and disadvantages of both to select the best motor-drive system for an application. Machine designers should not limit utilization of steppers or servos This article presents an overview of stepper according to a fixed mindset or comfort level, but should learn where and servo capabilities to serve as selection each technology works best for controlling a specific mechanism and criteria between the two technologies. process to be performed. A thorough understanding of these technologies will help you achieve optimum Today’s digital stepper motor drives provide enhanced drive features, mechatronic designs to bring out the full option flexibility and communication protocols using advanced capabilities of your machine. integrated circuits and simplified programming techniques. The same is true of servo motor systems, while higher torque density, improved electronics, advanced algorithms and higher feedback resolution have resulted in higher system bandwidth capabilities as well as lower initial and overall operating costs for many applications. STEPPER MOTOR SYSTEM OVERVIEW Stepper motors have several major advantages over servo systems. They typically cost less, have common NEMA mountings, offer lower-torque options, require less-costly cabling, and their open-loop motion control simplifies machine integration and operation. -

Stepping Motors Fundamentals
AN907 Stepping Motors Fundamentals Author: Reston Condit TYPES OF STEPPING MOTORS Microchip Technology Inc. There are three basic types of stepping motors: Dr. Douglas W. Jones permanent magnet, variable reluctance and hybrid. University of Iowa This application note covers all three types. Permanent magnet motors have a magnetized rotor, while variable reluctance motors have toothed soft-iron rotors. Hybrid INTRODUCTION stepping motors combine aspects of both permanent Stepping motors fill a unique niche in the motor control magnet and variable reluctance technology. world. These motors are commonly used in measure- The stator, or stationary part of the stepping motor ment and control applications. Sample applications holds multiple windings. The arrangement of these include ink jet printers, CNC machines and volumetric windings is the primary factor that distinguishes pumps. Several features common to all stepper motors different types of stepping motors from an electrical make them ideally suited for these types of point of view. From the electrical and control system applications. These features are as follows: perspective, variable reluctance motors are distant 1. Brushless – Stepper motors are brushless. The from the other types. Both permanent magnet and commutator and brushes of conventional hybrid motors may be wound using either unipolar motors are some of the most failure-prone windings, bipolar windings or bifilar windings. Each of components, and they create electrical arcs that these is described in the sections below. are undesirable or dangerous in some environments. Variable Reluctance Motors 2. Load Independent – Stepper motors will turn at Variable Reluctance Motors (also called variable a set speed regardless of load as long as the switched reluctance motors) have three to five load does not exceed the torque rating for the windings connected to a common terminal. -

Academic Regulations, Course Structure and Detailed Syllabus
ACADEMIC REGULATIONS, COURSE STRUCTURE AND DETAILED SYLLABUS M.Tech (POWER ELECTRONICS AND ELECTRIC DRIVES) FOR MASTER OF TECHNOLOGY TWO YEAR POST GRADUATE COURSE (Applicable for the batches admitted from 2014-2015) R14 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) SCHOOL OF ENGINEERING Venkatapur, Ghatkesar, Hyderabad – 500088 ANURAG GROUP OF INSTITUTIONS (AUTONOMOUS) M.TECH. (POWER ELECTRONICS AND ELECTRIC DRIVES) I YEAR - I SEMESTER COURSE STRUCTURE AND SYLLUBUS Subject Code Subject L P Credits A31058 Machine Modeling& Analysis 3 0 3 A31059 Power Electronic Converters-I 3 0 3 A31024 Modern Control Theory 3 0 3 A31060 Power Electronic Control of DC Drives 3 0 3 Elective-I 3 0 3 A31029 HVDC Transmission A31061 Operations Research A31062 Embedded Systems Elective-II A31027 Microcontrollers and Applications 3 0 3 A31063 Programmable Logic Controllers and their Applications A31064 Special Machines A31213 Power Converters Lab 0 3 2 A31214 Seminar - - 2 Total 18 3 22 I YEAR - II SEMESTER Subject Subject L P Credits Code A32058 Power Electronic Converters-II 3 0 3 A32059 Power Electronic Control of AC Drives 3 0 3 A32022 Flexible AC Transmission Systems (FACTS) 3 0 3 A32060 Neural Networks and Fuzzy Systems 3 0 3 Elective-III A32061 Digital Control Systems 3 0 3 A32062 Power Quality A32063 Advanced Digital Signal Processing Elective-IV A32064 Dynamics of Electrical Machines A32065 High-Frequency Magnetic Components A32066 3 0 3 Renewable Energy Systems A32213 Electrical Systems Simulation Lab 0 3 2 A32214 Seminar-II - - 2 Total 18 3 22 II YEAR – I SEMESTER Code Subject L P Credits A33219 Comprehensive Viva-Voce - - 2 A33220 Project Seminar 0 3 2 A33221 Project Work Part-I - - 18 Total Credits - 3 22 II YEAR – II SEMESTER Code Subject L P Credits A34207 Project Work Part-II and Seminar - - 22 Total - - 22 L P C M. -
Stepper Motor
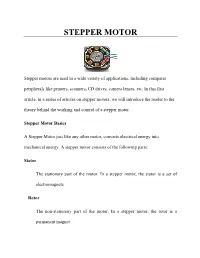
STEPPER MOTOR Stepper motors are used in a wide variety of applications, including computer peripherals like printers, scanners, CD drives, camera lenses, etc. In this first article, in a series of articles on stepper motors, we will introduce the reader to the theory behind the working and control of a stepper motor. Stepper Motor Basics A Stepper Motor just like any other motor, converts electrical energy into mechanical energy. A stepper motor consists of the following parts: Stator The stationary part of the motor. In a stepper motor, the stator is a set of electromagnets. Rotor The non-stationary part of the motor. In a stepper motor, the rotor is a permanent magnet. The arrangement of the electromagnets and the permanent magnets in a simple stepper motor is shown in the following diagram. Stepper Motor Construction Stepper Motor Operation Stepper Motor Operation When each of the electromagnet pairs is energized successively, the permanent magnet is attracted to the electromagnet, and aligns with it. This results in rotation of the permanent magnet. This is illustrated in “Stepper Motor Operation” diagram. The stepper motor gets its name from the fact that the rotor rotates in discrete step increments. The simple stepper motor has a step angle of 90 degrees. More complex stepper motors can have step angles as low as 3.6 degrees. These stepper motors have more no. of poles in the rotor. A complex stepper motor is shown in below diagram. The dark grey areas on the rotor are South poles and light grey areas on the rotor are North poles. -

Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications
American-Eurasian Journal of Scientific Research 11 (4): 271-274, 2016 ISSN 1818-6785 © IDOSI Publications, 2016 DOI: 10.5829/idosi.aejsr.2016.11.4.22905 Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications Mrs. J. Suganthi vinodhini and R. Samuel Rajesh Babu Research Scholar, Sathyabama University, India Abstract: In electric traction application electrical energy used was: 1.direct current and 2.alternating current. In this world already a constant voltage constant frequency single phase and three phase AC readily available. For some applications it is needed to have variable voltage and variable frequency for this conversions need between dc and ac sources and this conversion can be carried out by power converters. For converting AC–AC cycloconverter are widely used as a converter. The ns of alternating current drives relates with the frequency (f) and number of poles (p) present in the induction motor. It is not feasible by changing the poles of a motor under running processes, so the only one way during running condition the frequency can be varied. In the absence of direct current (DC) link with constant voltage constant frequency alternating current to variable voltage variable frequency alternating current is needed to run the electric traction applications, so the cycloconverter will make this as possible with reliable and economical. This work explains how to control the speed of single phase induction motor and single phase to single phase Cycloconverter using different frequency conversions with R Load was carried out using MATLAB / Simulink. Key words: Cycloconverter Electric traction Pulse width modulation Synchronous speed (ns ) INTRODUCTION switches instead of thyristors. -

Stepper Motors
Stepper Motors By Brian Tomiuk, Jack Good, Matthew Edwards, Isaac Snellgrove November 14th, 2018 1 What is a Stepper Motor? ● A motor whose movement is divided into discrete “steps” ○ “Turn 10 steps clockwise” ● Holds its position without additional control ○ No sensor or feedback loop 2 Parts of a Stepper Motor Stator - Stays Static Rotor - Rotates the motor shaft https://phidgets.files.wordpress.com/2014/06/stepper_back_web.jpg 3 Different Types of Torque Holding torque - How much load can the motor hold in place when the coils are energized Detent torque - The torque the motor produces when the windings are not energized, sometimes call residual torque 4 Advantages of Stepper Motors ● Has high holding torque (maintains its position) ● Moves in discrete amounts ● Inexpensive ● Brushless (can last longer than brushed motors) 5 Disadvantages of Stepper Motors ● Uses the same amount of power regardless of load ○ Lower power efficiency ● Torque decreases rapidly as speed increases ● No internal feedback ○ Cannot tell when a step was missed ○ Must step slowly to ensure accuracy ● Low torque to inertia ○ Cannot accelerate loads very rapidly 6 How Stepper Motors Work 7 How a Stepper Motor Works Unpowered Electromagnets Bar with magnetic ends A basic stepper motor consists of a series of electromagnets surrounding a magnetically charged bar 8 How a Stepper Motor Works S Powering a pair of the electromagnets causes the middle bar to align with the electromagnets S 9 How a Stepper Motor Works Changing which electromagnets are powered and unpowered -

Course Description Bachelor of Technology (Electrical Engineering)
COURSE DESCRIPTION BACHELOR OF TECHNOLOGY (ELECTRICAL ENGINEERING) COLLEGE OF TECHNOLOGY AND ENGINEERING MAHARANA PRATAP UNIVERSITY OF AGRICULTURE AND TECHNOLOGY UDAIPUR (RAJASTHAN) SECOND YEAR (SEMESTER-I) BS 211 (All Branches) MATHEMATICS – III Cr. Hrs. 3 (3 + 0) L T P Credit 3 0 0 Hours 3 0 0 COURSE OUTCOME - CO1: Understand the need of numerical method for solving mathematical equations of various engineering problems., CO2: Provide interpolation techniques which are useful in analyzing the data that is in the form of unknown functionCO3: Discuss numerical integration and differentiation and solving problems which cannot be solved by conventional methods.CO4: Discuss the need of Laplace transform to convert systems from time to frequency domains and to understand application and working of Laplace transformations. UNIT-I Interpolation: Finite differences, various difference operators and theirrelationships, factorial notation. Interpolation with equal intervals;Newton’s forward and backward interpolation formulae, Lagrange’sinterpolation formula for unequal intervals. UNIT-II Gauss forward and backward interpolation formulae, Stirling’s andBessel’s central difference interpolation formulae. Numerical Differentiation: Numerical differentiation based on Newton’sforward and backward, Gauss forward and backward interpolation formulae. UNIT-III Numerical Integration: Numerical integration by Trapezoidal, Simpson’s rule. Numerical Solutions of Ordinary Differential Equations: Picard’s method,Taylor’s series method, Euler’s method, modified -

Power Processing, Part 1. Electric Machinery Analysis
DOCONEIT MORE BD 179 391 SE 029 295,. a 'AUTHOR Hamilton, Howard B. :TITLE Power Processing, Part 1.Electic Machinery Analyiis. ) INSTITUTION Pittsburgh Onii., Pa. SPONS AGENCY National Science Foundation, Washingtcn, PUB DATE 70 GRANT NSF-GY-4138 NOTE 4913.; For related documents, see SE 029 296-298 n EDRS PRICE MF01/PC10 PusiPostage. DESCRIPTORS *College Science; Ciirriculum Develoiment; ElectricityrFlectrOmechanical lechnology: Electronics; *Fagineering.Education; Higher Education;,Instructional'Materials; *Science Courses; Science Curiiculum:.*Science Education; *Science Materials; SCientific Concepts ABSTRACT A This publication was developed as aportion of a two-semester sequence commeicing ateither the sixth cr'seventh term of,the undergraduate program inelectrical engineering at the University of Pittsburgh. The materials of thetwo courses, produced by a ional Science Foundation grant, are concernedwith power convrs systems comprising power electronicdevices, electrouthchanical energy converters, and associated,logic Configurations necessary to cause the system to behave in a prescribed fashion. The emphisis in this portionof the two course sequence (Part 1)is on electric machinery analysis. lechnigues app;icable'to electric machines under dynamicconditions are anallzed. This publication consists of sevenchapters which cW-al with: (1) basic principles: (2) elementary concept of torqueand geherated voltage; (3)tile generalized machine;(4i direct current (7) macrimes; (5) cross field machines;(6),synchronous machines; and polyphase -
Performance Rating of Variable Frequency Drives
AHRI Standard 1210 (I-P) 2017 Standard for Performance Rating of Variable Frequency Drives IMPORTANT SAFETY DISCLAIMER AHRI does not set safety standards and does not certify or guarantee the safety of any products, components or systems designed, tested, rated, installed or operated in accordance with this standard/guideline. It is strongly recommended that products be designed, constructed, assembled, installed and operated in accordance with nationally recognized safety standards and code requirements appropriate for products covered by this standard/guideline. AHRI uses its best efforts to develop standards/guidelines employing state-of-the-art and accepted industry practices. AHRI does not certify or guarantee that any tests conducted under its standards/guidelines will be non- hazardous or free from risk. Note: This standard supersedes ANSI/AHRI Standard 1210 (I-P)-2011 with Addenda 1 and 2. For SI ratings, see AHRI Standard 1211 (SI)-2017. AHRI CERTIFICATION PROGRAM PROVISIONS Scope of the Certification Program The Certification Program includes all Variable Frequency Drive as defined in Section 2 of this standard. Certified Ratings The following certification program ratings are verified by test as indicated in Section 7.1 at the Standard Rating Conditions: Drive System Efficiency, %. Motor Insulation Stress Peak Voltage, V Motor Insulation Stress Rise Time, µsec Power Line Harmonics (Total Harmonic Current Distortion), %. Price $10.00 (M) $20.00 (NM) ©Copyright 2017, by Air-Conditioning, Heating and Refrigeration Institute Printed -

AC Servo Motor & D2 Drive
AC Servo Motor & D2 Drive Technical Information AC Servo Motor & D2 Drive HIWIN MIKROSYSTEM CORP. No.6, Jingke Central Rd., Taichung Precision Machinery Park, Taichung 40852, Taiwan Tel: +886-4-23550110 Fax: +886-4-23550123 www.hiwinmikro.tw [email protected] Subsidiaries & R&D Centers HIWIN GmbH HIWIN Schweiz GmbH HIWIN KOREA OFFENBURG, GERMANY JONA, SWITZERLAND SUWON, KOREA www.hiwin.de www.hiwin.ch www.hiwin.kr www.hiwin.eu [email protected] [email protected] [email protected] HIWIN JAPAN HIWIN FRANCE HIWIN CHINA KOBE‧TOKYO‧NAGOYA‧NAGANO‧ ECHAUFFOUR, FRANCE SUZHOU, CHINA TOHOKU‧HOKURIKU‧HIROSHIMA‧ www.hiwin.fr www.hiwin.cn KUMAMOTO‧FUKUOKA, JAPAN [email protected] [email protected] www.hiwin.co.jp [email protected] HIWIN USA HIWIN s.r.o. Mega-Fabs Motion System, Ltd. CHICAGO‧SILICON VALLEY, U.S.A. BRNO, CZECH REPUBLIC HAIFA, ISRAEL www.hiwin.com www.hiwin.cz www.mega-fabs.com [email protected] [email protected] [email protected] HIWIN Srl HIWIN SINGAPORE BRUGHERIO, ITALY SINGAPORE www.hiwin.it www.hiwin.sg [email protected] [email protected] Technical Information The specifications in this catalog are subject to change without notification. ©2017 FORM MD99TE06-1704 (PRINTED IN TAIWAN) INDUSTRIE 4.0 Best Partner Linear Motor Stage Linear Motor Automated transport / AOI application / Machine tool / Touch panel industry / Precision / Semiconductor Semiconductor industry / • Iron-core Linear Motor Laser manufacturing machine / • Coreless Linear Motor Glass cutting machine • Linear Shaft Motor LMT • Ironcore linear motor-LMFA series, • Planar Servo Motor LMSA series, -

Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives
Review Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives Matthias Hunstig Grube 14, 33098 Paderborn, Germany; [email protected] Academic Editor: Delbert Tesar Received: 26 November 2016; Accepted: 18 January 2017; Published: 6 February 2017 Abstract: Piezoelectric inertia motors—also known as stick-slip motors or (smooth) impact drives—use the inertia of a body to drive it in small steps by means of an uninterrupted friction contact. In addition to the typical advantages of piezoelectric motors, they are especially suited for miniaturisation due to their simple structure and inherent fine-positioning capability. Originally developed for positioning in microscopy in the 1980s, they have nowadays also found application in mass-produced consumer goods. Recent research results are likely to enable more applications of piezoelectric inertia motors in the future. This contribution gives a critical overview of their historical development, functional principles, and related terminology. The most relevant aspects regarding their design—i.e., friction contact, solid state actuator, and electrical excitation—are discussed, including aspects of control and simulation. The article closes with an outlook on possible future developments and research perspectives. Keywords: inertia motor; stick-slip motor; smooth impact drive; piezeoelectric motor; review 1. Introduction Piezoelectric actuators have long been used in diverse applications, especially because of their short response time and high resolution. The major drawback of these solid state actuators in positioning applications is their small stroke: actuators made of state-of-the-art lead zirconate titanate (PZT) ceramics only reach strains up to 2 . A typical piezoelectric actuator with 10 mm length thus reaches a maximum stroke of only 20 µm.h Bending actuator designs [1] and other mechanisms [2] can increase the stroke at the expense of stiffness and actuation force ([3]; [4] (pp.