Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
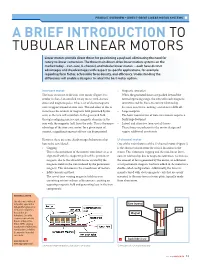
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Stepper Motor Or Servo Motor: Which Should It Be?
Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL ENGINEER THE EXCEPTIONAL Stepper Motor or Servo Motor: Which Should It Be? Engineer the Exceptional ENGINEER THE EXCEPTIONAL Each technology has its niche, and since the selection of either stepper or servo ENGINEER THE EXCEPTIONAL technology affects the likelihood of success, it is important that the machine designer consider the technical advantages and disadvantages of both to select the best motor-drive system for an application. Machine designers should not limit utilization of steppers or servos This article presents an overview of stepper according to a fixed mindset or comfort level, but should learn where and servo capabilities to serve as selection each technology works best for controlling a specific mechanism and criteria between the two technologies. process to be performed. A thorough understanding of these technologies will help you achieve optimum Today’s digital stepper motor drives provide enhanced drive features, mechatronic designs to bring out the full option flexibility and communication protocols using advanced capabilities of your machine. integrated circuits and simplified programming techniques. The same is true of servo motor systems, while higher torque density, improved electronics, advanced algorithms and higher feedback resolution have resulted in higher system bandwidth capabilities as well as lower initial and overall operating costs for many applications. STEPPER MOTOR SYSTEM OVERVIEW Stepper motors have several major advantages over servo systems. They typically cost less, have common NEMA mountings, offer lower-torque options, require less-costly cabling, and their open-loop motion control simplifies machine integration and operation. -
Brushless DC Motor Controller
ON Semiconductor Is Now To learn more about onsemi™, please visit our website at www.onsemi.com onsemi and and other names, marks, and brands are registered and/or common law trademarks of Semiconductor Components Industries, LLC dba “onsemi” or its affiliates and/or subsidiaries in the United States and/or other countries. onsemi owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of onsemi product/patent coverage may be accessed at www.onsemi.com/site/pdf/Patent-Marking.pdf. onsemi reserves the right to make changes at any time to any products or information herein, without notice. The information herein is provided “as-is” and onsemi makes no warranty, representation or guarantee regarding the accuracy of the information, product features, availability, functionality, or suitability of its products for any particular purpose, nor does onsemi assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. Buyer is responsible for its products and applications using onsemi products, including compliance with all laws, regulations and safety requirements or standards, regardless of any support or applications information provided by onsemi. “Typical” parameters which may be provided in onsemi data sheets and/ or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. onsemi does not convey any license under any of its intellectual property rights nor the rights of others. -

Stepping Motors Fundamentals
AN907 Stepping Motors Fundamentals Author: Reston Condit TYPES OF STEPPING MOTORS Microchip Technology Inc. There are three basic types of stepping motors: Dr. Douglas W. Jones permanent magnet, variable reluctance and hybrid. University of Iowa This application note covers all three types. Permanent magnet motors have a magnetized rotor, while variable reluctance motors have toothed soft-iron rotors. Hybrid INTRODUCTION stepping motors combine aspects of both permanent Stepping motors fill a unique niche in the motor control magnet and variable reluctance technology. world. These motors are commonly used in measure- The stator, or stationary part of the stepping motor ment and control applications. Sample applications holds multiple windings. The arrangement of these include ink jet printers, CNC machines and volumetric windings is the primary factor that distinguishes pumps. Several features common to all stepper motors different types of stepping motors from an electrical make them ideally suited for these types of point of view. From the electrical and control system applications. These features are as follows: perspective, variable reluctance motors are distant 1. Brushless – Stepper motors are brushless. The from the other types. Both permanent magnet and commutator and brushes of conventional hybrid motors may be wound using either unipolar motors are some of the most failure-prone windings, bipolar windings or bifilar windings. Each of components, and they create electrical arcs that these is described in the sections below. are undesirable or dangerous in some environments. Variable Reluctance Motors 2. Load Independent – Stepper motors will turn at Variable Reluctance Motors (also called variable a set speed regardless of load as long as the switched reluctance motors) have three to five load does not exceed the torque rating for the windings connected to a common terminal. -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -

DRM105, PM Sinusoidal Motor Vector Control with Quadrature
PM Sinusoidal Motor Vector Control with Quadrature Encoder Designer Reference Manual Devices Supported: MCF51AC256 Document Number: DRM105 Rev. 0 09/2008 How to Reach Us: Home Page: www.freescale.com Web Support: http://www.freescale.com/support USA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot Road Tempe, Arizona 85284 1-800-521-6274 or +1-480-768-2130 www.freescale.com/support Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Information in this document is provided solely to enable system and Schatzbogen 7 software implementers to use Freescale Semiconductor products. There are 81829 Muenchen, Germany no express or implied copyright licenses granted hereunder to design or +44 1296 380 456 (English) fabricate any integrated circuits or integrated circuits based on the +46 8 52200080 (English) information in this document. +49 89 92103 559 (German) +33 1 69 35 48 48 (French) www.freescale.com/support Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, Japan: representation or guarantee regarding the suitability of its products for any Freescale Semiconductor Japan Ltd. particular purpose, nor does Freescale Semiconductor assume any liability Headquarters arising out of the application or use of any product or circuit, and specifically ARCO Tower 15F disclaims any and all liability, including without limitation consequential or 1-8-1, Shimo-Meguro, Meguro-ku, incidental damages. “Typical” parameters that may be provided in Freescale Tokyo 153-0064 Semiconductor data sheets and/or specifications can and do vary in different Japan applications and actual performance may vary over time. -

Vector Control of an Induction Motor Based on a DSP
Vector Control of an Induction Motor based on a DSP Master of Science Thesis QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering CHALMERS UNIVERSITY OF TECHNOLOGY G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN © QIAN CHENG LEI YUAN, 2011. Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology SE–412 96 G¨oteborg Sweden Telephone +46 (0)31–772 1000 Chalmers Bibliotek, Reproservice G¨oteborg, Sweden 2011 Vector Control of an Induction Motor based on a DSP QIAN CHENG LEI YUAN Department of Energy and Environment Division of Electric Power Engineering Chalmers University of Technology Abstract In this thesis project, a vector control system for an induction motor is implemented on an evaluation board. By comparing the pros and cons of eight candidates of evaluation boards, the TMS320F28335 DSP Experimenter Kit is selected as the digital controller of the vector control system. Necessary peripheral and interface circuits are built for the signal measurement, the three-phase inverter control and the system protection. These circuits work appropriately except that the conditioning circuit for analog-to-digital con- version contains too much noise. At the stage of the control algorithm design, the designed vector control system is simulated in Matlab/Simulink with both S-function and Simulink blocks. The simulation results meet the design specifications well. -
Research and Development of a High-Resolution Piezoelectric Rotary Stage
KAUNAS UNIVERSITY OF TECHNOLOGY IGNAS GRYBAS RESEARCH AND DEVELOPMENT OF A HIGH-RESOLUTION PIEZOELECTRIC ROTARY STAGE Doctoral Dissertation Technological Sciences, Mechanical Engineering (09T) 2017, Kaunas This doctoral dissertation was prepared at Kaunas University of Technology, Institute of Mechatronics during the period of 2013–2017. The studies were supported by the Research Council of Lithuania. Scientific Supervisor: Habil. Dr. Algimantas Bubulis, (Kaunas University of Technology, Technological Sciences, Mechanical Engineering, 09T). Doctoral dissertation has been published in: http://ktu.edu Editor: Dovilė Dumbrauskaitė (Publishing Office “Technologija”) © I. Grybas, 2017 ISBN xxxx-xxxx The bibliographic information about the publication is available in the National Bibliographic Data Bank (NBDB) of the Martynas Mažvydas National Library of Lithuania KAUNO TECHNOLOGIJOS UNIVERSITETAS IGNAS GRYBAS AUKŠTOS SKYROS PJEZOELEKTRINIO SUKAMOJO STALIUKO KŪRIMAS IR TYRIMAS Daktaro disertacija Technologiniai mokslai, mechanikos inžinerija (09T) 2017, Kaunas Disertacija rengta 2013–2017 metais Kauno technologijos universiteto Mechatronikos institute. Mokslinius tyrimus rėmė Lietuvos mokslo taryba. Mokslinis vadovas: Habil. dr. Algimantas Bubulis (Kauno technologijos universitetas, technologiniai mokslai, mechanikos inžinerija, 09T). Interneto svetainės, kurioje skelbiama disertacija, adresas: http://ktu.edu Redagavo: Dovilė Dumbrauskaitė (leidykla “Technologija“) © I. Grybas, 2017 ISBN xxxx-xxxx Leidinio bibliografinė informacija pateikiama -
Stepper Motor
STEPPER MOTOR Stepper motors are used in a wide variety of applications, including computer peripherals like printers, scanners, CD drives, camera lenses, etc. In this first article, in a series of articles on stepper motors, we will introduce the reader to the theory behind the working and control of a stepper motor. Stepper Motor Basics A Stepper Motor just like any other motor, converts electrical energy into mechanical energy. A stepper motor consists of the following parts: Stator The stationary part of the motor. In a stepper motor, the stator is a set of electromagnets. Rotor The non-stationary part of the motor. In a stepper motor, the rotor is a permanent magnet. The arrangement of the electromagnets and the permanent magnets in a simple stepper motor is shown in the following diagram. Stepper Motor Construction Stepper Motor Operation Stepper Motor Operation When each of the electromagnet pairs is energized successively, the permanent magnet is attracted to the electromagnet, and aligns with it. This results in rotation of the permanent magnet. This is illustrated in “Stepper Motor Operation” diagram. The stepper motor gets its name from the fact that the rotor rotates in discrete step increments. The simple stepper motor has a step angle of 90 degrees. More complex stepper motors can have step angles as low as 3.6 degrees. These stepper motors have more no. of poles in the rotor. A complex stepper motor is shown in below diagram. The dark grey areas on the rotor are South poles and light grey areas on the rotor are North poles. -

Stepper Motors
Stepper Motors By Brian Tomiuk, Jack Good, Matthew Edwards, Isaac Snellgrove November 14th, 2018 1 What is a Stepper Motor? ● A motor whose movement is divided into discrete “steps” ○ “Turn 10 steps clockwise” ● Holds its position without additional control ○ No sensor or feedback loop 2 Parts of a Stepper Motor Stator - Stays Static Rotor - Rotates the motor shaft https://phidgets.files.wordpress.com/2014/06/stepper_back_web.jpg 3 Different Types of Torque Holding torque - How much load can the motor hold in place when the coils are energized Detent torque - The torque the motor produces when the windings are not energized, sometimes call residual torque 4 Advantages of Stepper Motors ● Has high holding torque (maintains its position) ● Moves in discrete amounts ● Inexpensive ● Brushless (can last longer than brushed motors) 5 Disadvantages of Stepper Motors ● Uses the same amount of power regardless of load ○ Lower power efficiency ● Torque decreases rapidly as speed increases ● No internal feedback ○ Cannot tell when a step was missed ○ Must step slowly to ensure accuracy ● Low torque to inertia ○ Cannot accelerate loads very rapidly 6 How Stepper Motors Work 7 How a Stepper Motor Works Unpowered Electromagnets Bar with magnetic ends A basic stepper motor consists of a series of electromagnets surrounding a magnetically charged bar 8 How a Stepper Motor Works S Powering a pair of the electromagnets causes the middle bar to align with the electromagnets S 9 How a Stepper Motor Works Changing which electromagnets are powered and unpowered