Characteristics Analysis of Doubly Fed Magnetic Geared Motor Considering Winding Frequency Conditions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications
American-Eurasian Journal of Scientific Research 11 (4): 271-274, 2016 ISSN 1818-6785 © IDOSI Publications, 2016 DOI: 10.5829/idosi.aejsr.2016.11.4.22905 Single Phase to Single Phase Step-Down Cycloconverter for Electric Traction Applications Mrs. J. Suganthi vinodhini and R. Samuel Rajesh Babu Research Scholar, Sathyabama University, India Abstract: In electric traction application electrical energy used was: 1.direct current and 2.alternating current. In this world already a constant voltage constant frequency single phase and three phase AC readily available. For some applications it is needed to have variable voltage and variable frequency for this conversions need between dc and ac sources and this conversion can be carried out by power converters. For converting AC–AC cycloconverter are widely used as a converter. The ns of alternating current drives relates with the frequency (f) and number of poles (p) present in the induction motor. It is not feasible by changing the poles of a motor under running processes, so the only one way during running condition the frequency can be varied. In the absence of direct current (DC) link with constant voltage constant frequency alternating current to variable voltage variable frequency alternating current is needed to run the electric traction applications, so the cycloconverter will make this as possible with reliable and economical. This work explains how to control the speed of single phase induction motor and single phase to single phase Cycloconverter using different frequency conversions with R Load was carried out using MATLAB / Simulink. Key words: Cycloconverter Electric traction Pulse width modulation Synchronous speed (ns ) INTRODUCTION switches instead of thyristors. -

Total Solutions for Quality Locomotive Electrical Rotating Component Remanufacturing
RPI Rail Products International, Inc. Total Solutions For Quality Locomotive Electrical Rotating Component Remanufacturing Alternators Generators Traction Motors Traction Motor Components We Know What You Want Services That Are Designed Around You The RPI organization has been built from the ground up to Rather than just providing a standard commodity, focus on the unique requirements of the railroad industry. RPI offers a true value-added approach to our product Now There Is One Source That Can Handle All There are a number of factors that distinguish RPI from offerings. We can tailor manufacturing processes and Your Locomotive Traction Component Repair, our competitors: customize our products and services to meet a variety • RPI is more responsive to individual customer needs. of customer demands and specifications. This gives RPI the ability to effectively operate as a “job shop” Rebuild And Remanufacturing Needs • RPI is quality driven with an emphasis on for small projects — or on a very large scale as a continuous improvement. In fact, we wrote the procedures used by OEM’s today to rebuild production manufacturing line. We can also provide traction motors. product development and product improvements or Rail Products International, Inc. (RPI) is a leader in upgrades. RPI offers a choice of repair, rebuild or • RPI maintains a high level of on-time delivery performance. providing remanufacturing services to the railroad remanufacturing of all components, supplemented by industry for electric transmission components • RPI offers extremely competitive pricing. a unit exchange program for armatures, coils, traction used for both freight and passenger locomotives. • RPI has over 75 years of remanufacturing experience. -

Optimization of Powertrain in EV
energies Article Optimization of Powertrain in EV Grzegorz Sieklucki Department of Power Electronics and Energy Control Systems, AGH University of Science and Technology, 30-059 Krakow, Poland; [email protected] Abstract: The method for preliminary powertrain design is presented in the paper. Performance of the EV is realized by motor torque–speed curve and gear ratio optimization. The typical two-zone mechanical characteristic of a PMSM traction motor is included in the optimization program. The longitudinal vehicle model is considered in the paper. Some examples try to show the calculation possibilities in application to existing vehicles: Tesla Model S and Mini Cooper SE. Keywords: electric vehicle; electromechanical systems; optimization; multi-objective optimization; field weakening; traction motors; kinematics; motor torque; gear 1. Introduction The conversion of electrical energy into mechanical is very important for the drive in an Electric Vehicle (EV) and optimization of the car performance is discussed in the article. The path from battery to a traction force FT on the car wheels is called powertrain [1,2]. The presented optimization problem can be used to design preliminary powertrain in a EV. The torque–speed curve (mechanical characteristics) [3] of PMSM (Permanent Magnet Synchronous Motor) is introduced. This type of motor is the most popular in car manufacturers (Toyota, Nissan, BMW, Renault), but Tesla induction motor characteristics are also considered. The EV mathematical model is presented more precisely than in [4]. Citation: Sieklucki, G. Optimization Two design examples are included in the paper: gear ratio optimization in Tesla Model S, of Powertrain in EV. Energies 2021, 14, traction motor, and gear ratio optimization in the Mini Cooper SE. -

Electrics of Diesel Locomotive
Electrics of Diesel locomotive Introduction Most of the Diesel Electric Locomotives serving in Indian Railways are single engined with one DC self ventilated, separately excited, single bearing main generator. However, in order to improve the reliability and reduce maintenance DC generator is replaced by a Traction Alternator and rectifier in latter generation locomotives. This supplies power to six nose suspended, force ventilated, series wound DC motors connected in three series pairs. Of late, Indian Railways have introduced GM locomotives with state of the art AC-AC locomotives. These locomotives have AC Traction Generator and AC Traction Motors. Power for electrically driven auxiliaries and control circuits is obtained from a self-excited, self ventilated auxiliary generator mounted on the end of main generator. This also supplies the battery charging current. Output of auxiliary generator is maintained constant at different speed by a voltage regulator. It also takes care about the limit of current going out to avoid damage to the generator. 8 lead acid batteries in series with four cells per battery, being provided for starting the engine by motoring the main generator, and to supply all the control circuits and the locomotive lighting. The locomotive is provided with electrical end jumper cables to enable it to work in multiple with a number of other locomotives. Power Circuits The main generator is basically separately excited with or without a differential series field to give the required characteristic form (Fig.E 2.1). Each traction motor has separate reversing switch contacts for reversing the field current, and also field diverting arrangements (Fig.E-2.2). -

IEEE Standard for Rotating Electric Machinery for Rail and Road Vehicles
IEEE Std 11-2000 (Revision of IEEE Std 11-1980) IEEE Standard for Rotating Electric Machinery for Rail and Road Vehicles Sponsor Electric Machinery Committee of the IEEE Power Engineering Society Approved 30 January 2000 IEEE-SA Standards Board Abstract: This standard applies to rotating electric machinery which forms part of the propulsion and major auxiliary equipment on internally and externally powered electrically propelled rail and road vehicles and similar large transport and haulage vehicles and their trailers where specified in the contract. Keywords: armature, electric input, electric output, impedance, load, phase control, propulsion, regeneration, shutdown, ventilation, waveforms, windage The Institute of Electrical and Electronics Engineers, Inc. 3 Park Avenue, New York, NY 10016-5997, USA Copyright © 2000 by the Institute of Electrical and Electronics Engineers, Inc. All rights reserved. Published 31 July 2000. Printed in the United States of America. Print: ISBN 0-7381-1922-9 SH94805 PDF: ISBN 0-7381-1923-7 SS94805 No part of this publication may be reproduced in any form, in an electronic retrieval system or otherwise, without the prior written permission of the publisher. Authorized licensed use limited to: Eaton Corporation. Downloaded on November 06,2013 at 21:02:26 UTC from IEEE Xplore. Restrictions apply. IEEE Standards documents are developed within the IEEE Societies and the Standards Coordinating Com- mittees of the IEEE Standards Association (IEEE-SA) Standards Board. Members of the committees serve voluntarily and without compensation. They are not necessarily members of the Institute. The standards developed within IEEE represent a consensus of the broad expertise on the subject within the Institute as well as those activities outside of IEEE that have expressed an interest in participating in the development of the standard. -

Operating Manual for Tp -40 5 Model Rsd -5 6 Motor
OPERATING MANUAL TP-40 5 FOR Model RSD-5 6 Motor Road Switcher This manual covers basic operating instructions to assist the engineman in the efficient handling of the 1600 HP model RSD-5 6 motor road switching locomotive. Descriptive information pertaining to the most commonly used "specialties" is contained herein and defined with the phrase (if used). The manual is written so as to be complete . for locomotives with or without the specialty equipment. The information furnished is based on construction as of date material was compiled. AMERICAN LOCOMOTIVE COMPANY GENERAL ELECTRIC COMPANY Schenectady, N. Y. Printed in U.S.A. January, 1952 FROM THE COLLECTION OF CHRIS JACOBS ACTUAL PAGE SIZE - 4 ½ x 7 ½ TABLE OF CONTENTS General Data Section I Introduction Section II Controller Operating Handles Section III Preparation for Operation Section IV Operating Procedure Section V Air Equipment Section VI Miscellaneous Operating Instructions Section VII Gauges and Instruments Section VIII Automatic Alarms and Safeguards Section IX Fig. 1 – Part 1 LOCATION OF APPARATUS I - ENGINE 14-RADIATOR FAN 27- SAND BOXES 2- MAIN GENERATOR 15- RADIATOR FAN CLUTCH 28- SAND BOX COVER 29- HAND BRAKE 3- EXCITER 16-LUBRICATING OIL COOLER 30- GENERATOR AIR DUCTS 4- AUXILIARY GENERATOR 17- LUBRICATING OIL FILTERS 31- CAP HEATER 5- GAUGE PANEL 18- LUBRICATING OIL STRAINER 32- CAO SEATS 6- CONTROL STAND 19- ENGINE WATER TANK 33- HORN 7- BRAKE VALVES 20-AIR COMPRESSOR 34- BELL 6- CONTROL COMPARTMENT 21-MAIN AIR RESERVOIR 35- NUMBER BOXES 9-TURBO SUPERCHARGER 22- BATTERIES 36- CAB SEAT (MOD) 10-TURBO SUPERCHARGER FILTERS & SILENCERS 23- FUEL TANK 37- STEAM GENERATOR (MOD.) 11- TRACTION MOTOR BLOWERS 24- FUEL TANK FILLING CONNECTION 38- WATER TANK (MOD.) 12- RADIATORS 25- FUEL TANK GAUGE 39- WATER TANK FILLING CONNECTION (MOD.) 13-RADIATOR SHUTTERS 26- EMERGENCY FUEL CUT OFF 40- AUXILIARY CONTROL COMPARTMENT Fig. -

Intelligent Traction Motor Control Techniques for Hybrid and Electric Vehicles
Intelligent Traction Motor Control Techniques for Hybrid and Electric Vehicles By Scott Cash A thesis submitted to the University of Birmingham for the degree of Doctor of Philosophy Department of Mechanical Engineering The University of Birmingham September 2018 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. Abstract This thesis presents the research undertaken by the author within the field of intelligent traction motor control for Hybrid Electric Vehicle (HEV) and Electric Vehicle (EV) applications. A robust Fuzzy Logic (FL) based traction motor field-orientated control scheme is developed which can control multiple motor topologies and HEV/EV powertrain architectures without the need for re-tuning. This control scheme can aid in the development of an HEV/EV and for continuous control of the traction motor/s in the final production vehicle. An overcurrent-tolerant traction motor sizing strategy is developed to gauge if a prospective motor’s torque and thermal characteristics can fulfil a vehicle’s target dynamic and electrical objectives during the early development stages of an HEV/EV. An industrial case study is presented. -

Rail Product Guide American Traction Systems Locomotive Propulsion
Rail Product Guide Electric Propulsion Controls and Accessories American Traction Systems Locomotive Propulsion Systems and Products ATS Rail ATS designs and manufactures high efficiency locomotive Specifications propulsion systems and accessories for new or remanufactured Rated Power @ locomotives using AC or DC traction motors, with more than Voltage Range** Description Rated Volts Purpose 175 locomotive propulsion systems delivered since 2008. Part # Out In Out Armature For switching/ ATS Manufactured Components Module shunting 747kW 600-750V 0 - Input Series Field Propulsion Modules locomotives 1,600A Continuous Output Current (DC Motors) A300641 1,100A Continuous Output Current (AC Motors) Armature “Fast Field” Reversing Field Controllers Module For freight 747kW 600-750V 0 - Input Automatic Anti-Wheel Slip Control Separate Field locomotives Motor Over Load Protection A300791 Wheel Diameter Monitoring and Calibration Field Controller For DC motor 150kW 600-750V 0 - Input Induction Generator Module A300677 control Output 750VDC at any Engine Speed Bi-Directional For bi-directional 450- 800A Continuous Output Current Field Controller 748kW 0 - Input DC motor control 1150VDC Bi-directional for Engine Starting A310106 DC/DC For power delivery Dynamic Brake Module Brake Chopper control to dynamic 1495kW 600-750V 0 - Input 2800A Brake Current A300635 brake resistors Auxiliary Inverters Dual Buck/ For hybrid/ battery 2x 200kW @500V 360-650V 360-650V Radiator Fans Boost Controller locomotives DC DC DC Cooling Pumps A300691 Air Compressors -

Unit I – Electric Drives and Traction Part - a 1
UNIT I – ELECTRIC DRIVES AND TRACTION PART - A 1. List the advantages and disadvantages of electric traction. (Nov – 2017/Nov - 2014) Advantages It has great passenger carrying capacity at higher speed. High starting torque. Less maintenance cost. Cheapest method of traction. Disadvantages High capital cost. Problem of supply failure. Additional equipment is required for achieving electric braking and control. 2. Define gear ratio. (Nov - 2017) Gear ratio = (Input Speed)/ (Output Speed) = (Diameter of output gear) / (Diameter of input gear) 3. What are the merits and demerits of DC system of track electrification? (May - 2017) Merits Better torque-speed characteristic. Low maintenance cost. The weight of d.c motor per H.P is less in comparison to a.c motors. Efficient regenerative braking as compared to single phase a.c series motors. De – merits The overall cost is more because of heavy cost of additional substation equipment This system is preferred for suburban services and road transport where there are frequent stops and distance is less. 4. Give the expression for total tractive effort. (Nov- 2016/May – 2014/May 2012) Total tractive effort required to run a train on track = (Tractive effort to produce acceleration + Tractive effort to overcome effect of gravity + Tractive effort to overcome train resistance) FT = Fa + Fg +Fr 5. What are the recent trends in electric traction? (Nov – 2016/Nov -2014/May - 2014) Magnetic levitation, Maglev (Or) Magnetic suspension and Pseudo - Levitation 6. What are the factors governing scheduled speed of a train? (May - 2016) Acceleration and braking retardation Maximum or Crest speed Stopping time or Duration of stop 7. -

Power and Propulsion Solutions Modular Traction System (MTS)
Power and Propulsion Solutions Modular Traction System (MTS) BAE Systems' Power and Propulsion Solutions business area provides products to increase a vessel’s operating efficiency and performance while saving fuel, operational costs, and our environment. With more than 20 years of experience in hybrid propulsion, BAE Systems is partnering with leading manufacturers of marine diesel engines to provide complete, efficient propulsion and auxiliary power systems. The Modular Traction System (MTS) is composed of a traction motor/reduction gear and an integrated starter generator to provide propulsion and power for the vessel. The liquid-cooled, high power-to-weight ratio AC induction electric traction motor and reduction gear AC Traction Motor (ACTM) Integrated Starter connect directly to a propeller shaft to provide traction Generator (ISG) propulsion power. The traction motor incorporates a fixed-ratio planetary Features reduction gear, eliminating the need for a shifting transmission. The traction motor provides high power • Mechanically simple; long life and superior low-end starting torque. • Integrated starter generator – eliminates conventional starter wear The generator is coupled directly to the engine crankshaft, resulting in a compact bearingless design. • Superior low-end torque and high power-to-weight ratio The generator is sized to convert all engine crankshaft • Fits in conventional transmission space claim power to electrical power for use by the system. The compact MTS occupies an equivalent space claim of a • AC induction motor/permanent magnet generator — eliminates brush maintenance typical conventional transmission powertrain unit. • Installation flexibility: T-Drive or transverse engine mount This system’s design and packaging makes it easily adaptable to various configurations and easy to install. -
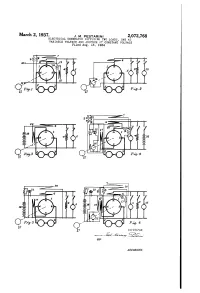
March 2, 1937. J. M. PESTARIN 2,072,768 ELECTRICAL GENERATOR SUPPLYING Two LOADS, ONE Af WARIABLE WOLTAGE and ANOTHER at CONSTANT VOLTAGE Filed Aug
March 2, 1937. J. M. PESTARIN 2,072,768 ELECTRICAL GENERATOR SUPPLYING Two LOADS, ONE Af WARIABLE WOLTAGE AND ANOTHER AT CONSTANT VOLTAGE Filed Aug. i5, l934 6 Patented Mar. 2, 1937 2,072,768 UNITED STATES PATENT OFFICE 2,072,768 ELECTRICAL GENERATOR SUPPLYING TWO OAOS, ONE AT WARIABLE VOLTAGE AND ANOTHER AT CONSTANT VOLTAGE Joseph Maximus Pestarini, Grant City, Staten sland, N. Y. Application August 15, 1934, Serial No. 40,011 29 Cairns. (C. 2-239) This invention relates to electrical plants where The invention here considered is a special in two loads have to be supplied with direct current, provement of the metadyne generator object of one load, let us call it the main load, requiring a continuously varying voltage, and another load, my U. S. Patent No. 2,038,380 and it will be easier 5 let us call it supplementary load, requiring a con understood if the latter application is borne in Stant voltage. mind. A Diesel electric locomotive is an important In a metadyne the primary current is auto example of such a plant. The traction motors matically so adjusted as to create by its ampere constitute the main load requiring a voltage vary -turns combined with the stator ampere turns pro 0. ing continuously with the speed of the train, and duced along the primary axis, a flux, called the primary flux, inducing an electromotive force 10 the auxiliary machines, such as the air condition between the secondary brushes and no electro ing machines, the heating resistors, the ventila motive force between the primary brushes, of such tors, the compressors, the battery, requiring a value as may be required for inducing between constant voltage. -

Recent Advances in Power Electronics Technology for Industrial and Traction Machine Drives
Recent Advances in Power Electronics Technology for Industrial and Traction Machine Drives THOMAS M. JAHNS, FELLOW, IEEE, AND VLADIMIR BLASKO, SENIOR MEMBER, IEEE Invited Paper This paper presents a review of the state of the art of power a period of remarkable progress in the development of power electronics technology in both industrial and traction drive appli- electronics technology that lies at the heart of these industrial cation. Key development trends include the dominance of ac ad- drives and electric traction drives as well. A major hallmark justable-speed drives in new applications, with the squirrel-cage induction machine as the preferred machine in most cases. Partic- of this unfolding drive development history has been an ac- ularly striking has been the rapid ascendance of the insulated-gate celerating trend away from dc commutator machines toward bipolar transistor (IGBT) as the predominant power switch in both various types of ac brushless machines as a direct result of industrial and traction applications ranging from fractional kilo- the continually improving cost-effectiveness of “electronic watts to multimegawatts. Key current issues such as industrial drive commutation” made possible by modern power electronics. input power quality and the effects of fast IGBT switching transients on the machines and electromagnetic interference (EMI) produc- This progress in power electronics technology has been tion are reviewed. Recent developments in electric traction for both largely driven by the appearance of successive generations rail and road vehicles are discussed, including the increasing mod- of gate-controlled power switches [1] beginning with bipolar ularity of new traction inverters in all sizes and the market intro- junction transistors (BJTs), followed by MOSFETs and insu- duction of new hybrid vehicles using advanced power electronics.