Quantitative Planetary Image Analysis Via Machine Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lunar Orbiter Photographic Atlas of the Near Side of the Moon Charles J
Lunar Orbiter Photographic Atlas of the Near Side of the Moon Charles J. Byrne Lunar Orbiter Photographic Atlas of the Near Side of the Moon Charles J. Byrne Image Again Middletown, NJ USA Cover illustration: Earth-based photograph of the full Moon from the “Consolidated Lunar Atlas” on the Website of the Lunar and Planetary Institute. British Library Cataloging-in-Publication Data Byrne, Charles J., 1935– Lunar Orbiter photographic atlas of the near side of the Moon 1. Lunar Orbiter (Artificial satellite) 2. Moon–Maps 3. Moon–Photographs from space I. Title 523.3 0223 ISBN 1852338865 Library of Congress Cataloging-in-Publication Data Byrne, Charles J., 1935– Lunar Orbiter photographic atlas of the near side of the Moon : with 619 figures / Charles J. Byrne. p. cm. Includes bibliographical references and index. ISBN 1-85233-886-5 (acid-free paper) 1. Moon–Maps. 2. Moon–Photographs from space. 3. Moon–Remote-sensing images. 4. Lunar Orbiter (Artificial satellite) I. Title. G1000.3.B9 2005 523.3 022 3–dc22 2004045006 Additional material to this book can be downloaded from http://extras.springer.com. ISBN 1-85233-886-5 Printed on acid-free paper. © 2005 Springer-Verlag London Limited Apart from any fair dealing for the purposes of research or private study, or criticism, or review, as permitted under the Copyright, Designs and Patents Act 1988, this publication may only be repro- duced, stored or transmitted, in any form or by any means, with the prior permission in writing of the publishers, or in the case of reprographic reproduction in accordance with the terms of licenses issued by the Copyright Licensing Agency. -
Apollo 11 Lunar Landing Mission Press Kit, Part 2
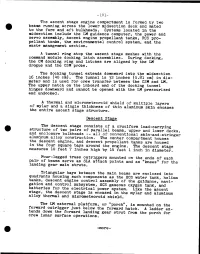
-lOl- The ascent stage engine compartment is formed by two beams running across the lower midsection deck and mated to the fore and aft bulkheads. Systems located in the midsection include the LM guidance computer, the power and servo assembly, ascent engine propellant tanks, RCS pro- pellant tanks, the environmental control system, and the waste management section. A tunnel ring atop the ascent stage meshes with the command module docking latch assemblies. During docking, the CM docking ring and latches are aligned by the LM drogue and the CSM probe. The dockingtunnel extends downward into the midsection 16 inches (40 cm). The tunnel is B2 inches (0.81 cm) in dia- meter and Is used for crew transfer between the CSM and LM. The upper hatch on the inboard end of the docking tunnel hinges downward and cannot be opened with the LM pressurized and u_docked. A thermal and mlcrometeoroid shield of multiple layers of mylar and a single thickness of thin aluminum skin encases the entire ascent stage structure. Descent Stase The descent stage consists of a cruciform load-carrylng structure of two pairs of parallel beams, upper and lower decks, and enclosure bulkheads -- all of conventional skln-and-strlnger aluminum alloy construction. The center compartment houses the descent engine, and descent propellant tanks are housed in the four square bays around the engine. The descent stage measures i0 feet 7 inches high by 14 feet 1 inch in diameter. Four-legged truss outriggers mounted on the ends of each pair of beams serve as SLA attach points and as "knees" for the landing gear main struts. -

Lunar Orbiter Ii
NASA CONTRACTOR NASA CR-883 REPORT LUNAR ORBITER II Photographic Mission Summary Prepared by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONAl AERONAUTICS AND SPACE ADMINISTRATION • WASHINGTON, D. C. • OCTOBER 1967 THE CRATER COPERNICUS - Photo taken by NASA-Boeing Lunar Orbiter II, November 23, 1966,00:05:42 GMT, from a distance of 150 miles. NASA CR-883 LUNAR ORBITER II Photographic Mission Summary Distribution of this report is provided in the interest of information exchange. Responsibility for the contents resides in the author or organization that prepared it. Issued by Originator as Document No. D2-100752-1 Prepared under Contract No. NAS 1-3800 by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sole by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTI price $3.00 CONTENTS Page No. 1.0 LUNAR ORBITER II MISSION SUMMARY 1 1.1 INTRODUCTION 4 1.1.1 Program Description 4 1.1.2 Program Management 5 1.1.3 Program Objectives 6 1.1.3.1 Mission II Objectives 6 1.1.4 Mission Design 8 1.1.5 Flight Vehicle Description 12 1.2 LAUNCH PREPARATION AND OPERATIONS 19 1.2.1 Launch Vehicle Preparation 19 1.2.2 Spacecraft Preparation 21 1.2.3 Launch Countdown 21 1.2.4 Launch Phase 22 1.2.4.1 Flight Vehicle Performance 22 1.2.5 Data Acquisition 24 1.3 MISSION OPERATIONS 29 1.3.1 Mission Profile 29 1.3.2 Spacecraft Performance 31 1.3.2.1 Photo Subsystem Performance 32 1.3.2.2 Power Subsystem Performance 34 1.3.2.3 Communications -

Apollo Over the Moon: a View from Orbit (Nasa Sp-362)
chl APOLLO OVER THE MOON: A VIEW FROM ORBIT (NASA SP-362) Chapter 1 - Introduction Harold Masursky, Farouk El-Baz, Frederick J. Doyle, and Leon J. Kosofsky [For a high resolution picture- click here] Objectives [1] Photography of the lunar surface was considered an important goal of the Apollo program by the National Aeronautics and Space Administration. The important objectives of Apollo photography were (1) to gather data pertaining to the topography and specific landmarks along the approach paths to the early Apollo landing sites; (2) to obtain high-resolution photographs of the landing sites and surrounding areas to plan lunar surface exploration, and to provide a basis for extrapolating the concentrated observations at the landing sites to nearby areas; and (3) to obtain photographs suitable for regional studies of the lunar geologic environment and the processes that act upon it. Through study of the photographs and all other arrays of information gathered by the Apollo and earlier lunar programs, we may develop an understanding of the evolution of the lunar crust. In this introductory chapter we describe how the Apollo photographic systems were selected and used; how the photographic mission plans were formulated and conducted; how part of the great mass of data is being analyzed and published; and, finally, we describe some of the scientific results. Historically most lunar atlases have used photointerpretive techniques to discuss the possible origins of the Moon's crust and its surface features. The ideas presented in this volume also rely on photointerpretation. However, many ideas are substantiated or expanded by information obtained from the huge arrays of supporting data gathered by Earth-based and orbital sensors, from experiments deployed on the lunar surface, and from studies made of the returned samples. -
NASA and Planetary Exploration
**EU5 Chap 2(263-300) 2/20/03 1:16 PM Page 263 Chapter Two NASA and Planetary Exploration by Amy Paige Snyder Prelude to NASA’s Planetary Exploration Program Four and a half billion years ago, a rotating cloud of gaseous and dusty material on the fringes of the Milky Way galaxy flattened into a disk, forming a star from the inner- most matter. Collisions among dust particles orbiting the newly-formed star, which humans call the Sun, formed kilometer-sized bodies called planetesimals which in turn aggregated to form the present-day planets.1 On the third planet from the Sun, several billions of years of evolution gave rise to a species of living beings equipped with the intel- lectual capacity to speculate about the nature of the heavens above them. Long before the era of interplanetary travel using robotic spacecraft, Greeks observing the night skies with their eyes alone noticed that five objects above failed to move with the other pinpoints of light, and thus named them planets, for “wan- derers.”2 For the next six thousand years, humans living in regions of the Mediterranean and Europe strove to make sense of the physical characteristics of the enigmatic planets.3 Building on the work of the Babylonians, Chaldeans, and Hellenistic Greeks who had developed mathematical methods to predict planetary motion, Claudius Ptolemy of Alexandria put forth a theory in the second century A.D. that the planets moved in small circles, or epicycles, around a larger circle centered on Earth.4 Only partially explaining the planets’ motions, this theory dominated until Nicolaus Copernicus of present-day Poland became dissatisfied with the inadequacies of epicycle theory in the mid-sixteenth century; a more logical explanation of the observed motions, he found, was to consider the Sun the pivot of planetary orbits.5 1. -
Lunar Orbiter Iv
NASA CONTRACTOR NASA CR-1054 REPORT LUNAR ORBITER IV Photographic Mission Summary Prepared by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION • WASHINGTON, D. C. • JUNE 1968 First Detailed View of Orientale Basin Photo taken by NASA-Boeing Lunar Orbiter IV, May 25, 1967, 05:33:34 GMT, from an altitude o£2,721 kilometers. NASA CR-1054 LUNAR ORBITER IV Photographic Mission Summary Distribution of this report is provided in the interest of information exchange. Responsibility for the contents resides in the author or organization that prepared it. Issued by Originator as Boeing Document No. 02-100754-1 (Vol. 1) Prepared under Contract No. NAS 1-3800 by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTI price $3.00 Contents Page 1.0 INTRODUCTION . ........ ............ ............... ....... ............... 5 1.1 Program Description ....................................................... 5 1.2 Program Management ...................................................... 5 1.3 Program Objectives ........................................................ 6 1.3.1 Mission IV Objectives ................................................. 7 1.4 Mission Design ............................... ..... ....... .... ............ 8 1.5 Flight Vehicle Description ... ......... ............................. .... .. .. 11 2.0 LAUNCH PREPARATION -
ILWS Report 137 Moon
Returning to the Moon Heritage issues raised by the Google Lunar X Prize Dirk HR Spennemann Guy Murphy Returning to the Moon Heritage issues raised by the Google Lunar X Prize Dirk HR Spennemann Guy Murphy Albury February 2020 © 2011, revised 2020. All rights reserved by the authors. The contents of this publication are copyright in all countries subscribing to the Berne Convention. No parts of this report may be reproduced in any form or by any means, electronic or mechanical, in existence or to be invented, including photocopying, recording or by any information storage and retrieval system, without the written permission of the authors, except where permitted by law. Preferred citation of this Report Spennemann, Dirk HR & Murphy, Guy (2020). Returning to the Moon. Heritage issues raised by the Google Lunar X Prize. Institute for Land, Water and Society Report nº 137. Albury, NSW: Institute for Land, Water and Society, Charles Sturt University. iv, 35 pp ISBN 978-1-86-467370-8 Disclaimer The views expressed in this report are solely the authors’ and do not necessarily reflect the views of Charles Sturt University. Contact Associate Professor Dirk HR Spennemann, MA, PhD, MICOMOS, APF Institute for Land, Water and Society, Charles Sturt University, PO Box 789, Albury NSW 2640, Australia. email: [email protected] Spennemann & Murphy (2020) Returning to the Moon: Heritage Issues Raised by the Google Lunar X Prize Page ii CONTENTS EXECUTIVE SUMMARY 1 1. INTRODUCTION 2 2. HUMAN ARTEFACTS ON THE MOON 3 What Have These Missions Left BehinD? 4 Impactor Missions 10 Lander Missions 11 Rover Missions 11 Sample Return Missions 11 Human Missions 11 The Lunar Environment & ImpLications for Artefact Preservation 13 Decay caused by ascent module 15 Decay by solar radiation 15 Human Interference 16 3. -

The Lunar Surface: Visualizing Changes Chitra Sivanandam
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 1998 The lunar surface: visualizing changes Chitra Sivanandam Follow this and additional works at: http://scholarworks.rit.edu/theses Recommended Citation Sivanandam, Chitra, "The lunar surface: visualizing changes" (1998). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Title Page http://www.cis.rit.edu/research/thesis/bs/1998/sivanandam/title.html SIMG-503 Senior Research THE LUNAR SURFACE: Visualizing Changes A comparison of images from the Clementine Mission to images from the Lunar Orbiter Program Final Report Chitra Sivanandam Center for Imaging Science Rochester Institute of Technology May 1998 Table of Contents 1 of 1 10/18/2007 11:20 AM contents http://www.cis.rit.edu/research/thesis/bs/1998/sivanandam/contents.html THE LUNAR SURFACE: Visualizing Changes Chitra Sivanandam Table of Contents Abstract Copyright Acknowledgement Introduction Background Theory The Imagery Digital Image Processing - Resampling Digital Image Processing - Fourier Transforms and Filters Methods Obtaining the Images The Processing Path The Comparison Results Pre-Processing (Before Entering IDL) The IDL Routine Discussion Conclusions References List of Symbols Appendix Title Page 1 of 1 10/10/2007 6:05 PM Abstract http://www.cis.rit.edu/research/thesis/bs/1998/sivanandam/abstract.html THE LUNAR SURFACE: Visualizing Changes Chitra Sivanandam Abstract This research project attempted to create a method of comparison between the imagery from the Lunar Orbiter program (from the mid 1960's) with that of the Clementine mission (of the mid 1990's). -

The Moon As a Laboratory for Biological Contamination Research
The Moon As a Laboratory for Biological Contamina8on Research Jason P. Dworkin1, Daniel P. Glavin1, Mark Lupisella1, David R. Williams1, Gerhard Kminek2, and John D. Rummel3 1NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA 2European Space AgenCy, Noordwijk, The Netherlands 3SETI InsQtute, Mountain View, CA 94043, USA Introduction Catalog of Lunar Artifacts Some Apollo Sites Spacecraft Landing Type Landing Date Latitude, Longitude Ref. The Moon provides a high fidelity test-bed to prepare for the Luna 2 Impact 14 September 1959 29.1 N, 0 E a Ranger 4 Impact 26 April 1962 15.5 S, 130.7 W b The microbial analysis of exploration of Mars, Europa, Enceladus, etc. Ranger 6 Impact 2 February 1964 9.39 N, 21.48 E c the Surveyor 3 camera Ranger 7 Impact 31 July 1964 10.63 S, 20.68 W c returned by Apollo 12 is Much of our knowledge of planetary protection and contamination Ranger 8 Impact 20 February 1965 2.64 N, 24.79 E c flawed. We can do better. Ranger 9 Impact 24 March 1965 12.83 S, 2.39 W c science are based on models, brief and small experiments, or Luna 5 Impact 12 May 1965 31 S, 8 W b measurements in low Earth orbit. Luna 7 Impact 7 October 1965 9 N, 49 W b Luna 8 Impact 6 December 1965 9.1 N, 63.3 W b Experiments on the Moon could be piggybacked on human Luna 9 Soft Landing 3 February 1966 7.13 N, 64.37 W b Surveyor 1 Soft Landing 2 June 1966 2.47 S, 43.34 W c exploration or use the debris from past missions to test and Luna 10 Impact Unknown (1966) Unknown d expand our current understanding to reduce the cost and/or risk Luna 11 Impact Unknown (1966) Unknown d Surveyor 2 Impact 23 September 1966 5.5 N, 12.0 W b of future missions to restricted destinations in the solar system. -

{PDF EPUB} Taking Science to the Moon Lunar Experiments and the Apollo Program by Donald A
Read Ebook {PDF EPUB} Taking Science to the Moon Lunar Experiments and the Apollo Program by Donald A. Beattie Moon Smasher: Links & Books. LCROSS Home Page www.nasa.gov/mission_pages/LCROSS/ Learn about the latest developments in the Lunar Crater Observation and Sensing Satellite mission at this website from NASA. Ames Research Center Vertical Gun Range www.nasa.gov/centers/ames/research/technology-onepagers/range-complex.html Want to know more about the research lab in which scientists slam objects into simulated space surfaces? The Ames Research Center houses instruments designed specifically for the study of hypervelocity aerodynamics. Find out more at this website. Northrop Grumman web page with LCROSS mission information www.northropgrumman.com/review/008-nasa-lunar-crater-observation- sensing-satellite-lcross.html At this website from Northrop Grumman, you can learn more about the LCROSS mission, check out a photo gallery, and more. NASA Lunar Science Institute lunarscience.arc.nasa.gov Learn all about NASA's Lunar Science Institute at the official website. Be sure to check out "Lunar Science for Kids" and "Ask a Lunar Scientist." "Water on the Moon" lcross.arc.nasa.gov/audio/WaterOnTheMoon.mp3 Download or stream this song written by LCROSS deputy project manager John Marmie. Books. Exploring the Moon: The Apollo Expeditions by David M. Harland. Springer-Praxis, 2008. Taking Science to the Moon: Lunar Experiments and the Apollo Program by Donald A. Beattie. The Johns Hopkins University Press, 2003. Return to the Moon: Exploration, Enterprise, and Energy in the Human Settlement of Space by Harrison H. Schmitt. Springer, 2006. Photographic Atlas of the Moon by S. -

Significance of Specific Force Models in Two Applications: Solar Sails to Sun-Earth L4/L5 and GRAIL Data Analysis Suggesting Lava Tubes and Buried Craters on the Moon
Purdue University Purdue e-Pubs Open Access Dissertations Theses and Dissertations January 2016 Significance of Specific orF ce Models in Two Applications: Solar Sails to Sun-Earth L4/L5 and GRAIL aD ta Analysis Suggesting Lava Tubes and Buried Craters on the Moon Rohan Sood Purdue University Follow this and additional works at: https://docs.lib.purdue.edu/open_access_dissertations Recommended Citation Sood, Rohan, "Significance of Specific orF ce Models in Two Applications: Solar Sails to Sun-Earth L4/L5 and GRAIL Data Analysis Suggesting Lava Tubes and Buried Craters on the Moon" (2016). Open Access Dissertations. 1374. https://docs.lib.purdue.edu/open_access_dissertations/1374 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. Graduate School Form 30 Updated 3414814237 PURDUE UNIVERSITY GRADUATE SCHOOL Thesis/Dissertation Acceptance This is to certify that the thesis/dissertation prepared By Rohan Sood Entitled Significance of Specific Force Models in Two Applications: Solar Sails to Sun-Earth L4/L5 and GRAIL Data Analysis Suggesting Lava Tubes and Buried Craters on the Moon For the degree of DOCTOR OF PHILOSOPHY Is approved by the final examining committee: Kathleen C. Howell Chair Henry J. Melosh James M. Longuski Dengfeng Sun To the best of my knowledge and as understood by the student in the Thesis/Dissertation Agreement, Publication Delay, and Certification Disclaimer (Graduate School Form 32), this thesis/dissertation adheres to the provisions of Purdue University’s “Policy of Integrity in Research” and the use of copyright material. Approved by Major Professor(s): Kathleen C. -

NASA Contractor Report: Lunar Orbiter IV Photographic Mission Summary
d. I. ... ' . .7 !\,~ 1: NASA CONTRACTOR -"NASA CR-11 REPORT e..1 LOAN COPY: RETURN TO AFWL (WLIL-2) KIRTLAND AFB, N. ME>( LUNAR ORBITER IV Photographic Mission Summary Prepared by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONALAERONAUTICS AND SPACE ADMINISTRATION WASHINGTON,D. C. JUNE 1968 First Detailed Viewof Orientale Basin Photo taken byNASA-Boeing Lunar OrbiterIV, May 25,1967, 05:33:34 GMT, from an altitude of 2,721 kilometers. LUNAR ORBITER IV Photographic Mission Summary Distribution of this report is provided in the interest of informationexchange. Responsibility for the contents resides in the author or organization that prepared it. Issued by Originator as Boeing Document No. D2- 100754- 1 (Vol. 1) Prepared under Contract No. NAS 1-3800 by THE BOEING COMPANY Seattle, Wash. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION ~ ~ For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTI price $3.00 Contents Page 1.0 INTRODUCTION .............................................................. 5 1.1 Program Description ........................................................ 5 1.2Program Management ....................................................... 5 1.3 Program Objectives ......................................................... 6 1.3.1 Mission IV Objectives .................................................. 7 1.4Mission Design ............................................................. 8 1.5Flight Vehicle Description ..................................................