Minicomputers: an Attitude
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Connecticut DEEP's List of Compliant Electronics Manufacturers Notice to Connecticut Retailersi
Connecticut DEEP’s List of Compliant Electronics manufacturers Notice to Connecticut Retailersi: This list below identifies electronics manufacturers that are in compliance with the registration and payment obligations under Connecticut’s State-wide Electronics Program. Retailers must check this list before selling Covered Electronic Devices (“CEDs”) in Connecticut. If there is a brand of a CED that is not listed below including retail over the internet, the retailer must not sell the CED to Connecticut consumers pursuant to section 22a-634 of the Connecticut General Statutes. Manufacturer Brands CED Type Acer America Corp. Acer Computer, Monitor, Television, Printer eMachines Computer, Monitor Gateway Computer, Monitor, Television ALR Computer, Monitor Gateway 2000 Computer, Monitor AG Neovo Technology AG Neovo Monitor Corporation Amazon Fulfillment Service, Inc. Kindle Computers Amazon Kindle Kindle Fire Fire American Future Technology iBuypower Computer Corporation dba iBuypower Apple, Inc. Apple Computer, Monitor, Printer NeXT Computer, Monitor iMac Computer Mac Pro Computer Mac Mini Computer Thunder Bolt Display Monitor Archos, Inc. Archos Computer ASUS Computer International ASUS Computer, Monitor Eee Computer Nexus ASUS Computer EEE PC Computer Atico International USA, Inc. Digital Prism Television ATYME CORPRATION, INC. ATYME Television Bang & Olufsen Operations A/S Bang & Olufsen Television BenQ America Corp. BenQ Monitor Best Buy Insignia Television Dynex Television UB Computer Toshiba Television VPP Matrix Computer, Monitor Blackberry Limited Balckberry PlayBook Computer Bose Corp. Bose Videowave Television Brother International Corp. Brother Monitor, Printer Canon USA, Inc. Canon Computer, Monitor, Printer Oce Printer Imagistics Printer Cellco Partnership Verizon Ellipsis Computer Changhong Trading Corp. USA Changhong Television (Former Guangdong Changhong Electronics Co. LTD) Craig Electronics Craig Computer, Television Creative Labs, Inc. -

The Video Game Industry an Industry Analysis, from a VC Perspective
The Video Game Industry An Industry Analysis, from a VC Perspective Nik Shah T’05 MBA Fellows Project March 11, 2005 Hanover, NH The Video Game Industry An Industry Analysis, from a VC Perspective Authors: Nik Shah • The video game industry is poised for significant growth, but [email protected] many sectors have already matured. Video games are a large and Tuck Class of 2005 growing market. However, within it, there are only selected portions that contain venture capital investment opportunities. Our analysis Charles Haigh [email protected] highlights these sectors, which are interesting for reasons including Tuck Class of 2005 significant technological change, high growth rates, new product development and lack of a clear market leader. • The opportunity lies in non-core products and services. We believe that the core hardware and game software markets are fairly mature and require intensive capital investment and strong technology knowledge for success. The best markets for investment are those that provide valuable new products and services to game developers, publishers and gamers themselves. These are the areas that will build out the industry as it undergoes significant growth. A Quick Snapshot of Our Identified Areas of Interest • Online Games and Platforms. Few online games have historically been venture funded and most are subject to the same “hit or miss” market adoption as console games, but as this segment grows, an opportunity for leading technology publishers and platforms will emerge. New developers will use these technologies to enable the faster and cheaper production of online games. The developers of new online games also present an opportunity as new methods of gameplay and game genres are explored. -

Case No COMP/M.1694 - EMC / DATA GENERAL
EN Case No COMP/M.1694 - EMC / DATA GENERAL Only the English text is available and authentic. REGULATION (EEC) No 4064/89 MERGER PROCEDURE Article 6(1)(b) NON-OPPOSITION Date: 06/10/1999 Also available in the CELEX database Document No 399M1694 Office for Official Publications of the European Communities L-2985 Luxembourg COMMISSION OF THE EUROPEAN COMMUNITIES Brussels, 06.10.1999 SG(99)D/7991 In the published version of this decision, some information has been omitted pursuant to Article 17(2) of Council Regulation (EEC) No PUBLIC VERSION 4064/89 concerning non-disclosure of business secrets and other confidential information. The MERGER PROCEDURE omissions are shown thus […]. ARTICLE 6(1)(b) DECISION Where possible the information omitted has been replaced by ranges of figures or a general description. To the notifying party Dear Sirs, Subject : Case No IV/M.1694-EMC/DATA GENERAL Notification of 3-09-19999 pursuant to Article 4 of Council Regulation No 4064/89. 1. On 3 September 1999, the Commission received a notification of a proposed concentration pursuant to Article 4 of Council Regulation (EEC) No 4064/891 by which EMC Corporation (“EMC”), USA, will acquire sole control of Data General Corporation (“Data General”), USA. 2. After examination of the notification the Commission has concluded that the notified operation falls within the scope of Council Regulation (EEC) No 4064/89 and does not raise serious doubts as to its compatibility with the common market and with the EEA Agreement. I. THE PARTIES 3. EMC Corporation , based in the U.S.A, is active mainly in the design and manufacture of a wide range of information technology products, including hardware, software and related services. -

Aviion SERVERS and WORKSTATIONS PLUS
"Great products ••• fantastic support!" Buzz Van Santvoord, VP of Operations, Plow & Hearth, Inc. Buzz Van Santvoord, Plow & Hearth When you've got 100 telesales reps VP of Operations, and Peter Rice, processing 6,500 orders a day your President, with a selection of items computer system had better work! from their catalogue. Virginia ba ed, Plow & Hearth, Inc. i a $30 million mail order company, specializing in product for country living. Mailing over 20 million catalogue a year and with an e tabli hed ba e of over 1 million cu tomer , it computer y tems are critical to the onver ion of the AOS / VS OBOL program to ACUCOBOL company' ucce and growth. commenced in June and the ystem went live on a Data General A VUON 8500 in September, in plenty of time for the Chri tma ru h. To meet it pecific need Plow & Hearth had inve ted The AIM plu AVUON combination gave the bu ine a dramatic more than $500,000, over a period of 13 year , developing a boo t: "The much fa ter re pon e time improved morale and Data General MY-ba ed y tern in AOS{VS COBOL with 300 increa ed our tele ale capacity without adding a body, and the program and 70 INFOS databa e . But by early 1995 the extra order gained gave u our be t Chri tma ever." company realized that their MY9600 didn't have the capacity to make it through the bu y Chri tma ea on. Expert migration consultants Buzz Van Santvoord, Vice Pre ident of Operation explains: Thi ca e tudy illu trate how Tran oft' AIM offering i more "A move to Open Sy tern wa our preferred strategic direction. -

Inside the Computer Microcomputer Minicomputer Mainframe
Inside the computer Microcomputer Classification of Systems: • Personal Computer / Workstation. – Microcomputer • Desktop machine, including portables. – Minicomputer • Used for small, individual tasks - such as – Mainframe simple desktop publishing, small business – Supercomputer accounting, etc.... • Typical cost : £500 to £5000. • Chapters 1-5 in Capron • Example : The PCs in the labs are microcomputers. Minicomputer Mainframe • Medium sized server • Large server / Large Business applications • Desk to fridge sized machine. • Large machines in purpose built rooms. • Used for distributed data processing and • Used as large servers and for intensive multi-user server support. business applications. • Typical cost : £5,000 to £500,000. • Typical cost : £500,000 to £10,000,000. • Example : Scarlet is a minicomputer. • Example : IBM ES/9000, IBM 370, IBM 390. Supercomputer • Scientific applications • Large machines. • Typically employ parallel architecture (multiple processors running together). • Used for VERY numerically intensive jobs. • Typical cost : £5,000,000 to £25,000,000. • Example : Cray supercomputer 1 What's in a Computer System? Software • The Onion Model - layers. • Divided into two main areas • Hardware • Operating system • BIOS • Used to control the hardware and to provide an interface between the user and the hardware. • Software • Manages resources in the machine, like • Where does the operating system come in? • Memory • Disk drives • Applications • includes games, word-processors, databases, etc.... Interfaces Hardware • The chunky stuff! •CUI • If you can touch it... it's probably hardware! • Command Line Interface • The mother board. •GUI • If we have motherboards... surely there must be • Graphical User Interface fatherboards? right? •WIMP • What about sonboards, or daughterboards?! • Windows, Icons, Mouse, Pulldown menus • Hard disk drives • Monitors • Keyboards BIOS Basics • Basic Input Output System • Directly controls hardware devices like UARTS (Universal Asynchronous Receiver-Transmitter) - Used in COM ports. -

Microcomputers: NQS PUBLICATIONS Introduction to Features and Uses
of Commerce Computer Science National Bureau and Technology of Standards NBS Special Publication 500-110 Microcomputers: NQS PUBLICATIONS Introduction to Features and Uses QO IGf) .U57 500-110 NATIONAL BUREAU OF STANDARDS The National Bureau of Standards' was established by an act ot Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides; (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is per- formed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology. THE NATIONAL MEASUREMENT LABORATORY provides the national system of physical and chemical and materials measurement; coordinates the system with measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation's scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government agencies; develops, produces, and -

Trade Mark Opposition Decision (O/396/02)
TRADE MARKS ACT 1994 IN THE MATTER of application No. 2165852 by Yorkshire Co-operatives Limited and IN THE MATTER of opposition thereto under No. 50738 by Sun Microsystems Incorporated. Background 1. On 6th May 1998 Yorkshire Co-operatives Limited (YCL) applied under the Trade Marks Act 1994 to register the mark SUNWIN for the goods and services specified in ANNEX A. 2. The application was accepted and published. On 21st February 2000 Sun Microsystems Incorporated (‘the opponents’) filed notice of opposition to the application. They are the proprietors of a large quantity of marks, registered in the UK and the under the Community system, a number of which are on display in ANNEX B to this decision. They state that these marks constitute a ‘family’ of marks, and have traded under the SUN and SUN prefixed trade marks since 1983, producing a wide range of ‘..computer hardware, software and other microelectronic goods and services..’ becoming, as a result, a market leader in computer workstations, servers and operating systems. 3. The opponents’ first grounds of opposition to registration is under s. 5(2)(b) of the Act, and relates (in particular, but not exclusively) to the following goods and services which are considered to be similar: Class 9: Computers; computer hardware, software and firmware; scientific apparatus and instruments; apparatus and instruments all for the recordal, storage, transmission and reproduction of audio, visual and audio visual data. Class 38: Installation and repair services relating to electrical apparatus and instruments, data processing apparatus and computers. Class 38: Telecommunications. 4. The opponents also consider that, as their earlier trade marks have a reputation in the United Kingdom, use of the applicants’ mark would be contrary to Section 5(3) of the Act, for goods and services which are not considered similar under Section 5(2). -

The History of Computing in the History of Technology
The History of Computing in the History of Technology Michael S. Mahoney Program in History of Science Princeton University, Princeton, NJ (Annals of the History of Computing 10(1988), 113-125) After surveying the current state of the literature in the history of computing, this paper discusses some of the major issues addressed by recent work in the history of technology. It suggests aspects of the development of computing which are pertinent to those issues and hence for which that recent work could provide models of historical analysis. As a new scientific technology with unique features, computing in turn can provide new perspectives on the history of technology. Introduction record-keeping by a new industry of data processing. As a primary vehicle of Since World War II 'information' has emerged communication over both space and t ime, it as a fundamental scientific and technological has come to form the core of modern concept applied to phenomena ranging from information technolo gy. What the black holes to DNA, from the organization of English-speaking world refers to as "computer cells to the processes of human thought, and science" is known to the rest of western from the management of corporations to the Europe as informatique (or Informatik or allocation of global resources. In addition to informatica). Much of the concern over reshaping established disciplines, it has information as a commodity and as a natural stimulated the formation of a panoply of new resource derives from the computer and from subjects and areas of inquiry concerned with computer-based communications technolo gy. -
2 CLASSIFICATION of COMPUTERS.Pdf
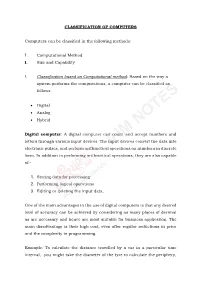
CLASSIFICATION OF COMPUTERS Computers can be classified in the following methods: I . Computational Method I. Size and Capability I. Classification based on Computational method: Based on the way a system performs the computations, a computer can be classified as follows: • Digital • Analog • Hybrid Digital computer: A digital computer can count and accept numbers and letters through various input devices. The input devices convert the data into electronic pulses, and perform arithmetical operations on numbers in discrete form. In addition to performing arithmetical operations, they are also capable of:- 1. Storing data for processing 2. Performing logical operations 3. Editing or deleting the input data. One of the main advantages in the use of digital computers is that any desired level of accuracy can be achieved by considering as many places of decimal as are necessary and hence are most suitable for business application. The main disadvantage is their high cost, even after regular reductions in price and the complexity in programming. Example: To calculate the distance travelled by a car in a particular time interval, you might take the diameter of the tyre to calculate the periphery, take into consideration the number of revolutions of the wheel per minute, take the time in minutes and multiply them all to get the distance moved. This is called digital calculation. A computer using the principle of digital calculations can be called a digital computer. Analog Computer: Analog computers process data input in a continuous form. Data such as voltage, resistance or temperature are represented in the computer as a continuous, unbroken flow of information, as in engineering and scientific applications, where quantities to be processed exists as waveforms or continually rising and falling voltages, pressure and so on. -
Digital and System Design
Digital System Design — Use of Microcontroller RIVER PUBLISHERS SERIES IN SIGNAL, IMAGE & SPEECH PROCESSING Volume 2 Consulting Series Editors Prof. Shinsuke Hara Osaka City University Japan The Field of Interest are the theory and application of filtering, coding, trans- mitting, estimating, detecting, analyzing, recognizing, synthesizing, record- ing, and reproducing signals by digital or analog devices or techniques. The term “signal” includes audio, video, speech, image, communication, geophys- ical, sonar, radar, medical, musical, and other signals. • Signal Processing • Image Processing • Speech Processing For a list of other books in this series, see final page. Digital System Design — Use of Microcontroller Dawoud Shenouda Dawoud R. Peplow University of Kwa-Zulu Natal Aalborg Published, sold and distributed by: River Publishers PO box 1657 Algade 42 9000 Aalborg Denmark Tel.: +4536953197 EISBN: 978-87-93102-29-3 ISBN:978-87-92329-40-0 © 2010 River Publishers All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, mechanical, photocopying, recording or otherwise, without prior written permission of the publishers. Dedication To Nadia, Dalia, Dina and Peter D.S.D To Eleanor and Caitlin R.P. v This page intentionally left blank Preface Electronic circuit design is not a new activity; there have always been good designers who create good electronic circuits. For a long time, designers used discrete components to build first analogue and then digital systems. The main components for many years were: resistors, capacitors, inductors, transistors and so on. The primary concern of the designer was functionality however, once functionality has been met, the designer’s goal is then to enhance per- formance. -

Chapter 1. a Chronology of Game Programming
This document was created by an unregistered ChmMagic, please go to http://www.bisenter.com to register it. Thanks . [ Team LiB ] Chapter 1. A Chronology of Game Programming "In the beginning the Universe was created. This has made a lot of people very angry and been widely regarded as a bad move." —Douglas Adams KEY TOPICS Phase I: Before Spacewar Phase II: Spacewar to Atari Phase III: Game Consoles and Personal Computers Phase IV: Shakedown and Consolidation Phase V: The Advent of the Game Engine Phase VI: The Handheld Revolution Phase VII: The Cellular Phenomenon Phase VIII: Multiplayer Games In Closing The art and science of game development have experienced a huge progression since the early days. Hardware has improved by orders of magnitude, whereas game complexity and richness have simply exploded. To better understand how games are coded today, and why, it is essential to look back and review the history of game programming. I have divided that lengthy narration into what I consider the eight most defining moments that shaped the current industry. Let's time warp ourselves to those moments and take a look at how things were done back then. This way the reasons behind today's practices will become obvious. I will avoid the trivial and focus on programming practices. Because raw data is useless without perspective, it's also important to provide some context in which to interpret the data and to understand how today's programming practices were developed. [ Team LiB ] This document was created by an unregistered ChmMagic, please go to http://www.bisenter.com to register it. -
Selection Between Unix in Minicomputer Setup and Lan
SELECTION BETWEEN UNIX IN MINICOMPUTER SETUP AND LAN CONFIGURATION FOR A MEDIUM-SIZED COMPANY CONSIDERING COMPUTERIZATION by LEUNG WAI-MING, RAYMOND ( -f 体 ) AND CHANG CHE SON (張 ) MBA PROJECT REPORT Presented to f. y . The Graduate Scfeol In Partial Fulfilment of the Requirements for the Degree of MASTER OF BUSINESS ADMINISTRATION THREE-YEAR MBA PROGRAMME THE CHINESE UNIVERSITY OF HONG KONG May 1991 (DR. STAN HU) Advisor . cC 乏 . 、 3 2s ^fj: .-if".〜— . ^^ ;::\,」一 H I,ft t, , 一 :湖.. 广 ...v., M r 5 ?, „ — / r, . 二 i/ . L I >(多 • i .二, , / f .、/ \ l .> . --- , 1•1 • ABSTRACT With the evolution of VLSI and the microcomputers, the cost of computerization dropped tremendously in recent years. The application of computer systems in medium-sized companies in Hong Kong became a necessity in order to gain the competitive edge over the rivalries. However, the widely accepted configurations of Personal Computers (PC) in Local Area Network (LAN) environment and the UNIX Operating System under minicomputers puzzled many Electronic Data Processing (EDP) managers and Management Information System (MIS) managers when considering computerization of their own companies. Our project aimed to study the advantages and disadvantages of computerization in a medium-sized company under Unix/Minicomputer and LAN/PC environments in Hong Kong. This report included the study on the requirements of computerization process of these companies and the pros and cons of both the Unix/Minicomputer and the LAN/PC configurations. An attempt was made to provide some recommendations and guidelines for those companies that might want to and decide to employ computers in their business arenas so that they could maximize their return on the investment on the computerization.