Part II: 8086/8088 Hardware Specifications and Interfacing Dr
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -

Class-Action Lawsuit
Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 1 of 279 Steve D. Larson, OSB No. 863540 Email: [email protected] Jennifer S. Wagner, OSB No. 024470 Email: [email protected] STOLL STOLL BERNE LOKTING & SHLACHTER P.C. 209 SW Oak Street, Suite 500 Portland, Oregon 97204 Telephone: (503) 227-1600 Attorneys for Plaintiffs [Additional Counsel Listed on Signature Page.] UNITED STATES DISTRICT COURT DISTRICT OF OREGON PORTLAND DIVISION BLUE PEAK HOSTING, LLC, PAMELA Case No. GREEN, TITI RICAFORT, MARGARITE SIMPSON, and MICHAEL NELSON, on behalf of CLASS ACTION ALLEGATION themselves and all others similarly situated, COMPLAINT Plaintiffs, DEMAND FOR JURY TRIAL v. INTEL CORPORATION, a Delaware corporation, Defendant. CLASS ACTION ALLEGATION COMPLAINT Case 3:20-cv-00863-SI Document 1 Filed 05/29/20 Page 2 of 279 Plaintiffs Blue Peak Hosting, LLC, Pamela Green, Titi Ricafort, Margarite Sampson, and Michael Nelson, individually and on behalf of the members of the Class defined below, allege the following against Defendant Intel Corporation (“Intel” or “the Company”), based upon personal knowledge with respect to themselves and on information and belief derived from, among other things, the investigation of counsel and review of public documents as to all other matters. INTRODUCTION 1. Despite Intel’s intentional concealment of specific design choices that it long knew rendered its central processing units (“CPUs” or “processors”) unsecure, it was only in January 2018 that it was first revealed to the public that Intel’s CPUs have significant security vulnerabilities that gave unauthorized program instructions access to protected data. 2. A CPU is the “brain” in every computer and mobile device and processes all of the essential applications, including the handling of confidential information such as passwords and encryption keys. -

A Simulator for the Intel 8086 Microprocessor
Rochester Institute of Technology RIT Scholar Works Theses 1988 A Simulator for the Intel 8086 microprocessor William A. Chapman Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Chapman, William A., "A Simulator for the Intel 8086 microprocessor" (1988). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. A SIMULATOR FOR THE INTEL 8086 MICROPROCESSOR by William A. Chapman A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering Approved by: Professor Ken Hsu ':"(':":T~h":"e~sJ.';":·S=--=-A-d'=""v-i:-s-o-r-)------- Professor James R. Schueckler Professor _~~ _ Professor __~__:--:~-=- _ (Department Head) DEPARTMENT OF ELECTRICAL ENGINEERING COLLEGE OF ENGINEERING ROCHESTER INSTITUTE OF TECHNOLOGY ROCHESTER, NEW YORK MAY, 1988 Abstract This project was originally suggested by J. Schueckler as an aid to teaching students the Intel 8086 Assembly Language. The need for such a tool becomes apparent when one considers the expense of providing students with dedicated hardware that rapidly becomes obsolete, but a Simulator which could be easily updated and runs on a general purpose or timesharing computer system would be accessible to many students for a fraction of the cost. The intended use of the Simulator therefore dictated that it precisely model the hardware, be available on a multiuser system and run as efficiently as possible. -
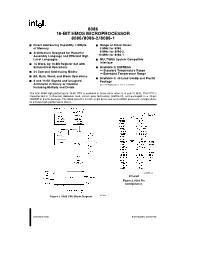
8086 16-Bit Hmos Microprocessor 8086/8086-2/8086-1
8086 16-BIT HMOS MICROPROCESSOR 8086/8086-2/8086-1 Y Direct Addressing Capability 1 MByte Y Range of Clock Rates: of Memory 5 MHz for 8086, 8 MHz for 8086-2, Y Architecture Designed for Powerful Assembly Language and Efficient High 10 MHz for 8086-1 Level Languages Y MULTIBUS System Compatible Interface Y 14 Word,by 16-Bit Register Set with Symmetrical Operations Y Available in EXPRESS –Standard Temperature Range Y 24 Operand Addressing Modes –Extended Temperature Range Y Bit,Byte,Word,and Block Operations Y Available in 40-Lead Cerdip and Plastic Y 8 and 16-Bit Signed and Unsigned Package Arithmetic in Binary or Decimal (See Packaging Spec.Order ›231369) Including Multiply and Divide The Intel 8086 high performance 16-bit CPU is available in three clock rates:5,8 and 10 MHz.The CPU is implemented in N-Channel,depletion load,silicon gate technology (HMOS-III),and packaged in a 40-pin CERDIP or plastic package.The 8086 operates in both single processor and multiple processor configurations to achieve high performance levels. 231455–2 40 Lead Figure 2.8086 Pin Configuration Figure 1.8086 CPU Block Diagram 231455–1 September 1990 Order Number:231455-005 8086 Table 1.Pin Description The following pin function descriptions are for 8086 systems in either minimum or maximum mode.The ‘‘Local Bus’’ in these descriptions is the direct multiplexed bus interface connection to the 8086 (without regard to additional bus buffers). Symbol Pin No.Type Name and Function AD15–AD0 2–16,39 I/O ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address (T1),and data (T2,T3,TW,T4) bus.A0 is analogous to BHE for the lower byte of the data bus,pins D7–D0.It is LOW during T1 when a byte is to be transferred on the lower portion of the bus in memory or I/O operations.Eight-bit oriented devices tied to the lower half would normally use A0 to condition chip select functions.(See BHE.) These lines are active HIGH and float to 3-state OFF during interrupt acknowledge and local bus ‘‘hold acknowledge’’. -

Advanced Architecture Intel Microprocessor History
Advanced Architecture Intel microprocessor history Computer Organization and Assembly Languages Yung-Yu Chuang with slides by S. Dandamudi, Peng-Sheng Chen, Kip Irvine, Robert Sedgwick and Kevin Wayne Early Intel microprocessors The IBM-AT • Intel 8080 (1972) • Intel 80286 (1982) – 64K addressable RAM – 16 MB addressable RAM – 8-bit registers – Protected memory – CP/M operating system – several times faster than 8086 – 5,6,8,10 MHz – introduced IDE bus architecture – 29K transistors – 80287 floating point unit • Intel 8086/8088 (1978) my first computer (1986) – Up to 20MHz – IBM-PC used 8088 – 134K transistors – 1 MB addressable RAM –16-bit registers – 16-bit data bus (8-bit for 8088) – separate floating-point unit (8087) – used in low-cost microcontrollers now 3 4 Intel IA-32 Family Intel P6 Family • Intel386 (1985) • Pentium Pro (1995) – 4 GB addressable RAM – advanced optimization techniques in microcode –32-bit registers – More pipeline stages – On-board L2 cache – paging (virtual memory) • Pentium II (1997) – Up to 33MHz – MMX (multimedia) instruction set • Intel486 (1989) – Up to 450MHz – instruction pipelining • Pentium III (1999) – Integrated FPU – SIMD (streaming extensions) instructions (SSE) – 8K cache – Up to 1+GHz • Pentium (1993) • Pentium 4 (2000) – Superscalar (two parallel pipelines) – NetBurst micro-architecture, tuned for multimedia – 3.8+GHz • Pentium D (2005, Dual core) 5 6 IA32 Processors ARM history • Totally Dominate Computer Market • 1983 developed by Acorn computers • Evolutionary Design – To replace 6502 in -

Programmable Digital Microcircuits - a Survey with Examples of Use
- 237 - PROGRAMMABLE DIGITAL MICROCIRCUITS - A SURVEY WITH EXAMPLES OF USE C. Verkerk CERN, Geneva, Switzerland 1. Introduction For most readers the title of these lecture notes will evoke microprocessors. The fixed instruction set microprocessors are however not the only programmable digital mi• crocircuits and, although a number of pages will be dedicated to them, the aim of these notes is also to draw attention to other useful microcircuits. A complete survey of programmable circuits would fill several books and a selection had therefore to be made. The choice has rather been to treat a variety of devices than to give an in- depth treatment of a particular circuit. The selected devices have all found useful ap• plications in high-energy physics, or hold promise for future use. The microprocessor is very young : just over eleven years. An advertisement, an• nouncing a new era of integrated electronics, and which appeared in the November 15, 1971 issue of Electronics News, is generally considered its birth-certificate. The adver• tisement was for the Intel 4004 and its three support chips. The history leading to this announcement merits to be recalled. Intel, then a very young company, was working on the design of a chip-set for a high-performance calculator, for and in collaboration with a Japanese firm, Busicom. One of the Intel engineers found the Busicom design of 9 different chips too complicated and tried to find a more general and programmable solu• tion. His design, the 4004 microprocessor, was finally adapted by Busicom, and after further négociation, Intel acquired marketing rights for its new invention. -

H&P Chapter 1 Supplement: but First, What Is Security? Assets
H&P Chapter 1 Supplement: Introduction to Security for Computer Architecture Students https://doi.org/10.7916/d8-7r78-2635 Adam Hastings Mohammed Tarek Simha Sethumadhavan October 1, 2019 For decades, the role of the computer architect has been to design systems that meet requirements, defined primarily by speed, area, and energy efficiency. However, as humans become more and more reliant on computers, it becomes increasingly obvious that our specifications have failed us on one key design requirement – Security, – as evidenced by nearly weeklynews of high-profile security breaches. In the face of such damaging consequences, it becomes clear that the security of our technology must no longer be relegated as an afterthought, but must be a first-order design requirement, from the very beginning—security must be “built-in” rather than “bolted on”, so to speak. In particular, it becomes important, even necessary, for security to be built into the lowest levels of the computing stack. It is for this reason that security must become a fundamental part of computer architecture, and must be included in any serious study of the subject. But First, What is Security? In its broadest sense, security is about protecting assets. An asset is anything of value that is worth protecting, e.g. anything from the valuables in a bank vault to a secret message shared between friends to classified government information to objects of personal sentimental value. As long as an asset is valued, its owners should work to secure it. For an asset to be secure, security professionals generally think of the asset as maintaining three essential properties: • Confidentiality—Is the asset only accessible to those authorized to access it? In computer systems, maintaining confidentiality means controlling who can read some piece of information. -

Intel X86 Assembly Language & Microarchitecture
Intel x86 Assembly Language & Microarchitecture #x86 Table of Contents About 1 Chapter 1: Getting started with Intel x86 Assembly Language & Microarchitecture 2 Remarks 2 Examples 2 x86 Assembly Language 2 x86 Linux Hello World Example 3 Chapter 2: Assemblers 6 Examples 6 Microsoft Assembler - MASM 6 Intel Assembler 6 AT&T assembler - as 7 Borland's Turbo Assembler - TASM 7 GNU assembler - gas 7 Netwide Assembler - NASM 8 Yet Another Assembler - YASM 9 Chapter 3: Calling Conventions 10 Remarks 10 Resources 10 Examples 10 32-bit cdecl 10 Parameters 10 Return Value 11 Saved and Clobbered Registers 11 64-bit System V 11 Parameters 11 Return Value 11 Saved and Clobbered Registers 11 32-bit stdcall 12 Parameters 12 Return Value 12 Saved and Clobbered Registers 12 32-bit, cdecl — Dealing with Integers 12 As parameters (8, 16, 32 bits) 12 As parameters (64 bits) 12 As return value 13 32-bit, cdecl — Dealing with Floating Point 14 As parameters (float, double) 14 As parameters (long double) 14 As return value 15 64-bit Windows 15 Parameters 15 Return Value 16 Saved and Clobbered Registers 16 Stack alignment 16 32-bit, cdecl — Dealing with Structs 16 Padding 16 As parameters (pass by reference) 17 As parameters (pass by value) 17 As return value 17 Chapter 4: Control Flow 19 Examples 19 Unconditional jumps 19 Relative near jumps 19 Absolute indirect near jumps 19 Absolute far jumps 19 Absolute indirect far jumps 20 Missing jumps 20 Testing conditions 20 Flags 21 Non-destructive tests 21 Signed and unsigned tests 22 Conditional jumps 22 Synonyms and terminology 22 Equality 22 Greater than 23 Less than 24 Specific flags 24 One more conditional jump (extra one) 25 Test arithmetic relations 25 Unsigned integers 25 Signed integers 26 a_label 26 Synonyms 27 Signed unsigned companion codes 27 Chapter 5: Converting decimal strings to integers 28 Remarks 28 Examples 28 IA-32 assembly, GAS, cdecl calling convention 28 MS-DOS, TASM/MASM function to read a 16-bit unsigned integer 29 Read a 16-bit unsigned integer from input. -

X86 Instruction Set 4.2 Why Learn Assembly
4.1 CS356 Unit 4 Intro to x86 Instruction Set 4.2 Why Learn Assembly • To understand something of the limitation of the HW we are running on • Helpful to understand performance • To utilize certain HW options that high-level languages don't allow (e.g. operating systems, utilizing special HW features, etc.) • To understand possible security vulnerabilities or exploits • Can help debugging 4.3 Compilation Process CS:APP 3.2.2 void abs(int x, int* res) • Demo of assembler { if(x < 0) *res = -x; – $ g++ -Og -c -S file1.cpp else *res = x; • Demo of hexdump } Original Code – $ g++ -Og -c file1.cpp – $ hexdump -C file1.o | more Disassembly of section .text: 0000000000000000 <_Z3absiPi>: 0: 85 ff test %edi,%edi 2: 79 05 jns 9 <_Z3absiPi+0x9> • Demo of 4: f7 df neg %edi 6: 89 3e mov %edi,(%rsi) 8: c3 retq objdump/disassembler 9: 89 3e mov %edi,(%rsi) b: c3 retq – $ g++ -Og -c file1.cpp Compiler Output – $ objdump -d file1.o (Machine code & Assembly) Notice how each instruction is turned into binary (shown in hex) 4.4 Where Does It Live • Match (1-Processor / 2-Memory / 3-Disk Drive) where each item resides: – Source Code (.c/.java) = 3 – Running Program Code = 2 – Global Variables = 2 – Compiled Executable (Before It Executes) = 3 – Current Instruction Being Executed = 1 – Local Variables = 2 (1) Processor (2) Memory (3) Disk Drive 4.5 BASIC COMPUTER ORGANIZATION 4.6 Processor • Performs the same 3-step process over and over again – Fetch an instruction from Processor Arithmetic 3 Add the memory Circuitry specified values Decode 2 It’s an ADD – Decode the instruction Circuitry • Is it an ADD, SUB, etc.? 1 Fetch – Execute the instruction Instruction System Bus • Perform the specified operation • This process is known as the ADD SUB Instruction Cycle CMP Memory 4.7 Processor CS:APP 1.4 • 3 Primary Components inside a processor – ALU – Registers – Control Circuitry • Connects to memory and I/O via address, data, and control buses (bus = group of wires) Bus Processor Memory PC/IP 0 Addr Control 0 op. -

Intel Architecture Software Developer's Manual
Intel Architecture Software Developer’s Manual Volume 2: Instruction Set Reference NOTE: The Intel Architecture Software Developer’s Manual consists of three volumes: Basic Architecture, Order Number 243190; Instruction Set Reference, Order Number 243191; and the System Programming Guide, Order Number 243192. Please refer to all three volumes when evaluating your design needs. 1999 Information in this document is provided in connection with Intel products. No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted by this document. Except as provided in Intel's Terms and Conditions of Sale for such products, Intel assumes no liability whatsoever, and Intel disclaims any express or implied warranty, relating to sale and/or use of Intel products including liability or warranties relating to fitness for a particular purpose, merchantability, or infringement of any patent, copyright or other intellectual property right. Intel products are not intended for use in medical, life saving, or life sustaining applications. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked “reserved” or “undefined.” Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. Intel’s Intel Architecture processors (e.g., Pentium®, Pentium® II, Pentium® III, and Pentium® Pro processors) may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. Contact your local Intel sales office or your distributor to obtain the latest specifications and before placing your product order. -

Intel 8086 MICROPROCESSOR ARCHITECTURE
Intel 8086 MICROPROCESSOR ARCHITECTURE 1 Features • It is a 16-bit μp. • 8086 has a 20 bit address bus can access up to 220 memory locations (1 MB). • It can support up to 64K I/O ports. • It provides 14, 16 -bit registers. • Word size is 16 bits and double word size is 4 bytes. • It has multiplexed address and data bus AD0- AD15 and A16 – A19. 2 • 8086 is designed to operate in two modes, Minimum and Maximum. • It can prefetches up to 6 instruction bytes from memory and queues them in order to speed up instruction execution. • It requires +5V power supply. • A 40 pin dual in line package. • Address ranges from 00000H to FFFFFH 3 Intel 8086 Internal Architecture 4 Internal architecture of 8086 • 8086 has two blocks BIU and EU. • The BIU handles all transactions of data and addresses on the buses for EU. • The BIU performs all bus operations such as instruction fetching, reading and writing operands for memory and calculating the addresses of the memory operands. The instruction bytes are transferred to the instruction queue. • EU executes instructions from the instruction system byte queue. 5 • BIU contains Instruction queue, Segment registers, Instruction pointer, Address adder. • EU contains Control circuitry, Instruction decoder, ALU, Pointer and Index register, Flag register. 6 EXECUTION UNIT • Decodes instructions fetched by the BIU • Generate control signals, • Executes instructions. The main parts are: • Control Circuitry • Instruction decoder • ALU 7 EXECUTION UNIT – General Purpose Registers 16 bits 8 bits 8 bits AH AL AX Accumulator BH BL BX Base CH CL CX Count DH DL DX Data SP Stack Pointer Pointer BP Base Pointer SI Source Index Index DI Destination Index 8 EXECUTION UNIT – General Purpose Registers Register Purpose AX Word multiply, word divide, word I /O AL Byte multiply, byte divide, byte I/O, decimal arithmetic AH Byte multiply, byte divide BX Store address information CX String operation, loops CL Variable shift and rotate DX Word multiply, word divide, indirect I/O (Used to hold I/O address during I/O instructions.