Intel X86 Assembly Language & Microarchitecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance
White Paper Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance Ofri Wechsler Intel Fellow, Mobility Group Director, Mobility Microprocessor Architecture Intel Corporation White Paper Inside Intel®Core™ Microarchitecture Introduction Introduction 2 The Intel® Core™ microarchitecture is a new foundation for Intel®Core™ Microarchitecture Design Goals 3 Intel® architecture-based desktop, mobile, and mainstream server multi-core processors. This state-of-the-art multi-core optimized Delivering Energy-Efficient Performance 4 and power-efficient microarchitecture is designed to deliver Intel®Core™ Microarchitecture Innovations 5 increased performance and performance-per-watt—thus increasing Intel® Wide Dynamic Execution 6 overall energy efficiency. This new microarchitecture extends the energy efficient philosophy first delivered in Intel's mobile Intel® Intelligent Power Capability 8 microarchitecture found in the Intel® Pentium® M processor, and Intel® Advanced Smart Cache 8 greatly enhances it with many new and leading edge microar- Intel® Smart Memory Access 9 chitectural innovations as well as existing Intel NetBurst® microarchitecture features. What’s more, it incorporates many Intel® Advanced Digital Media Boost 10 new and significant innovations designed to optimize the Intel®Core™ Microarchitecture and Software 11 power, performance, and scalability of multi-core processors. Summary 12 The Intel Core microarchitecture shows Intel’s continued Learn More 12 innovation by delivering both greater energy efficiency Author Biographies 12 and compute capability required for the new workloads and usage models now making their way across computing. With its higher performance and low power, the new Intel Core microarchitecture will be the basis for many new solutions and form factors. In the home, these include higher performing, ultra-quiet, sleek and low-power computer designs, and new advances in more sophisticated, user-friendly entertainment systems. -

Mac Labs. More Creativity
Mac labs. More creativity. More engagement. More learning. Every Mac comes ready for 21st-century learning. Mac OS X Server creates the ultimate lab environment. Creativity and innovation are critical skills in the modern Mac OS X Server includes simplified tools for creating wikis and workplace, which makes them critical skills to teach today’s blogs, so students and staff can set up and manage them with students. Apple offers comprehensive lab solutions for your little or no help from IT. The Spotlight Server feature makes it school or university that will creatively engage students and easy for students collaborating on projects to find and view motivate them to take an interest in their own learning. The content stored anywhere on the network. Of course, access iLife ’09 suite of applications comes standard on every Mac, controls are built in, so they only get the search results they’re so students can immediately begin creating podcasts, editing authorised to see. Mac OS X Server also allows for real-time videos, composing music, producing photo essays and more. streaming of audio and video content, which lets everyone get right to work instead of waiting for downloads – saving major Mac or PC? Have both. storage across your network. Now one lab really can solve all your computing needs. Every Mac is powered by an Intel processor and features Launch careers from your Mac lab. Mac OS X – the world’s most advanced operating system. As an Apple Authorised Training Centre for Education, your Mac OS X comes with an amazing dual-boot feature called school can build a bridge between students and real-world Boot Camp that lets students run Windows XP or Vista natively careers. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors
POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors THE ABILITY TO ESTIMATE POWER CONSUMPTION DURING EARLY-STAGE DEFINITION AND TRADE-OFF STUDIES IS A KEY NEW METHODOLOGY ENHANCEMENT. OPPORTUNITIES FOR SAVING POWER CAN BE EXPOSED VIA MICROARCHITECTURE-LEVEL MODELING, PARTICULARLY THROUGH CLOCK- GATING AND DYNAMIC ADAPTATION. Power dissipation limits have Thus far, most of the work done in the area David M. Brooks emerged as a major constraint in the design of high-level power estimation has been focused of microprocessors. At the low end of the per- at the register-transfer-level (RTL) description Pradip Bose formance spectrum, namely in the world of in the processor design flow. Only recently have handheld and portable devices or systems, we seen a surge of interest in estimating power Stanley E. Schuster power has always dominated over perfor- at the microarchitecture definition stage, and mance (execution time) as the primary design specific work on power-efficient microarchi- Hans Jacobson issue. Battery life and system cost constraints tecture design has been reported.2-8 drive the design team to consider power over Here, we describe the approach of using Prabhakar N. Kudva performance in such a scenario. energy-enabled performance simulators in Increasingly, however, power is also a key early design. We examine some of the emerg- Alper Buyuktosunoglu design issue in the workstation and server mar- ing paradigms in processor design and com- kets (see Gowan et al.)1 In this high-end arena ment on their inherent power-performance John-David Wellman the increasing microarchitectural complexities, characteristics. clock frequencies, and die sizes push the chip- Victor Zyuban level—and hence the system-level—power Power-performance efficiency consumption to such levels that traditionally See the “Power-performance fundamentals” Manish Gupta air-cooled multiprocessor server boxes may box. -

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -
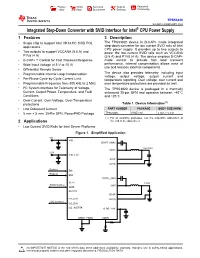
Integrated Step-Down Converter with SVID Interface for Intel® CPU
Product Order Technical Tools & Support & Folder Now Documents Software Community TPS53820 SLUSE33 –FEBRUARY 2020 Integrated Step-Down Converter with SVID Interface for Intel® CPU Power Supply 1 Features 3 Description The TPS53820 device is D-CAP+ mode integrated 1• Single chip to support Intel VR13.HC SVID POL applications step-down converter for low current SVID rails of Intel CPU power supply. It provides up to two outputs to • Two outputs to support VCCANA (5.5 A) and power the low current SVID rails such as VCCANA P1V8 (4 A) (5.5 A) and P1V8 (4 A). The device employs D-CAP+ • D-CAP+™ Control for Fast Transient Response mode control to provide fast load transient • Wide Input Voltage (4.5 V to 15 V) performance. Internal compensation allows ease of use and reduces external components. • Differential Remote Sense • Programmable Internal Loop Compensation The device also provides telemetry, including input voltage, output voltage, output current and • Per-Phase Cycle-by-Cycle Current Limit temperature reporting. Over voltage, over current and • Programmable Frequency from 800 kHz to 2 MHz over temperature protections are provided as well. 2 • I C System Interface for Telemetry of Voltage, The TPS53820 device is packaged in a thermally Current, Output Power, Temperature, and Fault enhanced 35-pin QFN and operates between –40°C Conditions and 125°C. • Over-Current, Over-Voltage, Over-Temperature (1) protections Table 1. Device Information • Low Quiescent Current PART NUMBER PACKAGE BODY SIZE (NOM) • 5 mm × 5 mm, 35-Pin QFN, PowerPAD Package TPS53820 RWZ (35) 5 mm × 5 mm (1) For all available packages, see the orderable addendum at 2 Applications the end of the data sheet. -

2. Assembly Language Assembly Language Is a Programming Language That Is Very Similar to Machine Language, but Uses Symbols Instead of Binary Numbers
2. Assembly Language Assembly Language is a programming language that is very similar to machine language, but uses symbols instead of binary numbers. It is converted by the assembler into executable machine- language programs. Assembly language is machine-dependent; an assembly program can only be executed on a particular machine. 2.1 Introduction to Assembly Language Tools Practical assembly language programs can, in general, be written using one of the two following methods: 1- The full-segment definition form 2- The simplified segment definition form In both methods, the source program includes two types of instructions: real instructions, and pseudo instructions. Real instructions such as MOV and ADD are the actual instructions that are translated by the assembler into machine code for execution by the CPU. Pseudo instructions, on the other hand, don’t generate machine code and are only used to give directions to the assembler about how it should translate the assembly language instructions into machine code. The assembler program converts the written assembly language file (called source file) into machine code file (called object file). Another program, known as the linker, converts the object file into an executable file for practical run. It also generates a special file called the map file which is used to get the offset addresses of the segments in the main assembly program as shown in figure 1. Other tools needed in assembling coding include a debugger, and an editor as shown in figure 2 Figure 2. Program Development Procedure There are several commercial assemblers available like the Microsoft Macro Assembler (MASM), and the Borland Turbo Assembler (TASM). -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -
LECTURE NOTE 5: the MEMORY MANAGEMENT REAL MODE Allows the Microprocessor to Address Only the First 1Mbyte of Memory Even If Its Pentium II Microprocessor
LECTURE NOTE 5: THE MEMORY MANAGEMENT REAL MODE Allows the microprocessor to address only the first 1Mbyte of memory even if its Pentium II microprocessor. The first 1Mbyte of memory is called either the real mode or conventional memory system. The DOS operating system requires the microprocessor to operate in this mode. It allows application software. Segment and Offset Through the combination of these two, a memory location is accessed in the real mode. All real mode memory address must consist of a segment address plus an offset address. Segment Address Defines the beginning address of any 64k-byte memory segment. Offset Address Sometimes called displacement or relative. Selects any location within the 64k-byte memory segment. It is the distance above the start of the segment. Note: Each segment register is internally appended with a 0H on its right end. The segment address can begin only at a 16-byte boundary, which is called paragraph. Once the beginning address in known, an ending address is known, by adding FFFFH. The code segment register defines the start of the code segment and the instruction pointer to locate the next instruction within the code segment. This combination (CS:IP or CS:EIP) locates the next instruction executed by the microprocessor. Stack data are referenced through the stack segment at the memory location addressed by either the stack pointer (SP/ESP) or the base pointer (BP/EBP). These combinations are referred to as SS:SP (SS:ESP) or SS:BP (SS:EBP). Addressing Modes 1. Register Addressing Mode transfer a copy of a byte or word from the source register or memory location to the destination register or memory location. -

The Pentium Processor
Chapter 7 The Pentium Processor 7–1 The main purpose of registers is to provide a scratch pad so that the processor can keep data on a temporary basis. For example, the processor may keep the procedure return address, stack pointer, instruction pointer, and so on. Registers are also used to keep the data handy so that it can avoid costly memory accesses. Keeping frequently accessed data in registers is a common compiler optimization technique. 7–2 Pentium supports the following three address spaces: 1. Linear address space 2. Physical address space 3. I/O address space (from discussion in Section 1.7) 7–3 In segmented memory organization, memory is partitioned into segments, where each segment is a small part of the memory. In the real mode, each segment of memory is a linear contiguous sequence of up to 64 KB. In the protected mode, it can be up to 4 GB. Pentium supports segmentation largely to provide backward compatibility to 8086. Note that 8086 is a 16-bit processor with 20 address lines. This mismatch between the processor’s 16-bit registers and 20-bit addresses is solved by using the segmented memory architecture. This segmented architecture has been carried over to Pentium. However, in the protected mode, it is possible to consider the entire memory as a single segment; thus, segmentation is completely turned off. 7–4 In the real mode, a segment is limited to 64 KB due to the fact that 16 bits are used to indicate the offset value into a segment. This magic number 16 is due to the 16-bit registers used 8086 processor. -
I386-Engine™ Technical Manual
i386-Engine™ C/C++ Programmable, 32-bit Microprocessor Module Based on the Intel386EX Technical Manual 1950 5 th Street, Davis, CA 95616, USA Tel: 530-758-0180 Fax: 530-758-0181 Email: [email protected] http://www.tern.com Internet Email: [email protected] http://www.tern.com COPYRIGHT i386-Engine, VE232, A-Engine, A-Core, C-Engine, V25-Engine, MotionC, BirdBox, PowerDrive, SensorWatch, Pc-Co, LittleDrive, MemCard, ACTF, and NT-Kit are trademarks of TERN, Inc. Intel386EX and Intel386SX are trademarks of Intel Coporation. Borland C/C++ are trademarks of Borland International. Microsoft, MS-DOS, Windows, and Windows 95 are trademarks of Microsoft Corporation. IBM is a trademark of International Business Machines Corporation. Version 2.00 October 28, 2010 No part of this document may be copied or reproduced in any form or by any means without the prior written consent of TERN, Inc. © 1998-2010 1950 5 th Street, Davis, CA 95616, USA Tel: 530-758-0180 Fax: 530-758-0181 Email: [email protected] http://www.tern.com Important Notice TERN is developing complex, high technology integration systems. These systems are integrated with software and hardware that are not 100% defect free. TERN products are not designed, intended, authorized, or warranted to be suitable for use in life-support applications, devices, or systems, or in other critical applications. TERN and the Buyer agree that TERN will not be liable for incidental or consequential damages arising from the use of TERN products. It is the Buyer's responsibility to protect life and property against incidental failure. TERN reserves the right to make changes and improvements to its products without providing notice. -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values..........................