X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
E0C88 CORE CPU MANUAL NOTICE No Part of This Material May Be Reproduced Or Duplicated in Any Form Or by Any Means Without the Written Permission of Seiko Epson
MF658-04 CMOS 8-BIT SINGLE CHIP MICROCOMPUTER E0C88 Family E0C88 CORE CPU MANUAL NOTICE No part of this material may be reproduced or duplicated in any form or by any means without the written permission of Seiko Epson. Seiko Epson reserves the right to make changes to this material without notice. Seiko Epson does not assume any liability of any kind arising out of any inaccuracies contained in this material or due to its application or use in any product or circuit and, further, there is no representation that this material is applicable to products requiring high level reliability, such as medical products. Moreover, no license to any intellectual property rights is granted by implication or otherwise, and there is no representation or warranty that anything made in accordance with this material will be free from any patent or copyright infringement of a third party. This material or portions thereof may contain technology or the subject relating to strategic products under the control of the Foreign Exchange and Foreign Trade Control Law of Japan and may require an export license from the Ministry of International Trade and Industry or other approval from another government agency. Please note that "E0C" is the new name for the old product "SMC". If "SMC" appears in other manuals understand that it now reads "E0C". © SEIKO EPSON CORPORATION 1999 All rights reserved. CONTENTS E0C88 Core CPU Manual PREFACE This manual explains the architecture, operation and instruction of the core CPU E0C88 of the CMOS 8-bit single chip microcomputer E0C88 Family. Also, since the memory configuration and the peripheral circuit configuration is different for each device of the E0C88 Family, you should refer to the respective manuals for specific details other than the basic functions. -

Technical Report TR-2020-10
Simulation-Based Engineering Lab University of Wisconsin-Madison Technical Report TR-2020-10 CryptoEmu: An Instruction Set Emulator for Computation Over Ciphers Xiaoyang Gong and Dan Negrut December 28, 2020 Abstract Fully homomorphic encryption (FHE) allows computations over encrypted data. This technique makes privacy-preserving cloud computing a reality. Users can send their encrypted sensitive data to a cloud server, get encrypted results returned and decrypt them, without worrying about data breaches. This project report presents a homomorphic instruction set emulator, CryptoEmu, that enables fully homomorphic computation over encrypted data. The software-based instruction set emulator is built upon an open-source, state-of-the-art homomorphic encryption library that supports gate-level homomorphic evaluation. The instruction set architecture supports multiple instructions that belong to the subset of ARMv8 instruction set architecture. The instruction set emulator utilizes parallel computing techniques to emulate every functional unit for minimum latency. This project re- port includes details on design considerations, instruction set emulator architecture, and datapath and control unit implementation. We evaluated and demonstrated the instruction set emulator's performance and scalability on a 48-core workstation. Cryp- toEmu shown a significant speed up in homomorphic computation performance when compared with HELib, a state-of-the-art homomorphic encryption library. Keywords: Fully Homomorphic Encryption, Parallel Computing, Homomorphic Instruction Set, Homomorphic Processor, Computer Architecture 1 Contents 1 Introduction 3 2 Background 4 3 TFHE Library 5 4 CryptoEmu Architecture Overview 7 4.1 Data Processing . .8 4.2 Branch and Control Flow . .9 5 Data Processing Units 9 5.1 Load/Store Unit . .9 5.2 Adder . -
Intel® Processor Graphics: Architecture & Programming
Intel® Processor Graphics: Architecture & Programming Jason Ross – Principal Engineer, GPU Architect Ken Lueh – Sr. Principal Engineer, Compiler Architect Subramaniam Maiyuran – Sr. Principal Engineer, GPU Architect Agenda 1. Introduction (Jason) 2. Compute Architecture Evolution (Jason) 3. Chip Level Architecture (Jason) Subslices, slices, products 4. Gen Compute Architecture (Maiyuran) Execution units 5. Instruction Set Architecture (Ken) 6. Memory Sharing Architecture (Jason) 7. Mapping Programming Models to Architecture (Jason) 8. Summary 2 Compute Applications * “The Intel® Iris™ Pro graphics and the Intel® Core™ i7 processor are … allowing me to do all of this while the graphics and video * never stopping” Dave Helmly, Solution Consulting Pro Video/Audio, Adobe Adobe Premiere Pro demonstration: http://www.youtube.com/watch?v=u0J57J6Hppg “We are very pleased that Intel is fully supporting OpenCL. DirectX11.2 We think there is a bright future for this technology.” Michael Compute Shader Bryant, Director of Marketing, Sony Creative Software Vegas* Software Family by Sony* * Optimized with OpenCL and Intel® Processor Graphics http://www.youtube.com/watch?v=_KHVOCwTdno * “Implementing [OpenCL] in our award-winning video editor, * PowerDirector, has created tremendous value for our customers by enabling big gains in video processing speed and, consequently, a significant reduction in total video editing time.” Louis Chen, Assistant Vice President, CyberLink Corp. * "Capture One Pro introduces …optimizations for Haswell, enabling remarkably -

Bitwise Operators in C Examples
Bitwise Operators In C Examples Alphonse misworships discommodiously. Epigastric Thorvald perishes changefully while Oliver always intercut accusatively.his anthology plumps bravely, he shown so cheerlessly. Baillie argufying her lashkar coweringly, she mass it Find the program below table which is c operators associate from star from the positive Left shift shifts each bit in its left operand to the left. Tying up some Arduino loose ends before moving on. The next example shows you how to do this. We can understand this better using the following Example. These operators move each bit either left or right a specified number of times. Amazon and the Amazon logo are trademarks of Amazon. Binary form of these values are given below. Shifting the bits of the string of bitwise operators in c examples and does not show the result of this means the truth table for making. Mommy, security and web. When integers are divided, it shifts the bits to the right. Operators are the basic concept of any programming language, subtraction, we are going to see how to use bitwise operators for counting number of trailing zeros in the binary representation of an integer? Adding a negative and positive number together never means the overflow indicates an exception! Not valid for string or complex operands. Les cookies essentiels sont absolument necessaires au bon fonctionnement du site. Like the assembly in C language, unlike other magazines, you may treat this as true. Bitwise OR operator is used to turn bits ON. To me this looks clearer as is. We will talk more about operator overloading in a future section, and the second specifies the number of bit positions by which the first operand is to be shifted. -

Multiprocessing Contents
Multiprocessing Contents 1 Multiprocessing 1 1.1 Pre-history .............................................. 1 1.2 Key topics ............................................... 1 1.2.1 Processor symmetry ...................................... 1 1.2.2 Instruction and data streams ................................. 1 1.2.3 Processor coupling ...................................... 2 1.2.4 Multiprocessor Communication Architecture ......................... 2 1.3 Flynn’s taxonomy ........................................... 2 1.3.1 SISD multiprocessing ..................................... 2 1.3.2 SIMD multiprocessing .................................... 2 1.3.3 MISD multiprocessing .................................... 3 1.3.4 MIMD multiprocessing .................................... 3 1.4 See also ................................................ 3 1.5 References ............................................... 3 2 Computer multitasking 5 2.1 Multiprogramming .......................................... 5 2.2 Cooperative multitasking ....................................... 6 2.3 Preemptive multitasking ....................................... 6 2.4 Real time ............................................... 7 2.5 Multithreading ............................................ 7 2.6 Memory protection .......................................... 7 2.7 Memory swapping .......................................... 7 2.8 Programming ............................................. 7 2.9 See also ................................................ 8 2.10 References ............................................. -
IXP400 Software's Programmer's Guide
Intel® IXP400 Software Programmer’s Guide June 2004 Document Number: 252539-002c Intel® IXP400 Software Contents INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER, AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY RELATING TO SALE AND/OR USE OF INTEL PRODUCTS, INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT, OR OTHER INTELLECTUAL PROPERTY RIGHT. Intel Corporation may have patents or pending patent applications, trademarks, copyrights, or other intellectual property rights that relate to the presented subject matter. The furnishing of documents and other materials and information does not provide any license, express or implied, by estoppel or otherwise, to any such patents, trademarks, copyrights, or other intellectual property rights. Intel products are not intended for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility applications. The Intel® IXP400 Software v1.2.2 may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. MPEG is an international standard for video compression/decompression promoted by ISO. Implementations of MPEG CODECs, or MPEG enabled platforms may require licenses from various entities, including Intel Corporation. This document and the software described in it are furnished under license and may only be used or copied in accordance with the terms of the license. The information in this document is furnished for informational use only, is subject to change without notice, and should not be construed as a commitment by Intel Corporation. -

(PSW). Seven Bits Remain Unused While the Rest Nine Are Used
8086/8088MP INSTRUCTOR: ABDULMUTTALIB A. H. ALDOURI The Flags Register It is a 16-bit register, also called Program Status Word (PSW). Seven bits remain unused while the rest nine are used. Six are status flags and three are control flags. The control flags can be set/reset by the programmer. 1. DF (Direction Flag) : controls the direction of operation of string instructions. (DF=0 Ascending order DF=1 Descending order) 2. IF (Interrupt Flag): controls the interrupt operation in 8086µP. (IF=0 Disable interrupt IF=1 Enable interrupt) 3. TF (Trap Flag): controls the operation of the microprocessor. (TF=0 Normal operation TF=1 Single Step operation) The status flags are set/reset depending on the results of some arithmetic or logical operations during program execution. 1. CF (Carry Flag) is set (CF=1) if there is a carry out of the MSB position resulting from an addition operation or subtraction. 2. AF (Auxiliary Carry Flag) AF is set if there is a carry out of bit 3 resulting from an addition operation. 3. SF (Sign Flag) set to 1 when result is negative. When result is positive it is set to 0. 4. ZF (Zero Flag) is set (ZF=1) when result of an arithmetic or logical operation is zero. For non-zero result this flag is reset (ZF=0). 5. PF (Parity Flag) this flag is set to 1 when there is even number of one bits in result, and to 0 when there is odd number of one bits. 6. OF (Overflow Flag) set to 1 when there is a signed overflow. -

The Intel X86 Microarchitectures Map Version 2.0
The Intel x86 Microarchitectures Map Version 2.0 P6 (1995, 0.50 to 0.35 μm) 8086 (1978, 3 µm) 80386 (1985, 1.5 to 1 µm) P5 (1993, 0.80 to 0.35 μm) NetBurst (2000 , 180 to 130 nm) Skylake (2015, 14 nm) Alternative Names: i686 Series: Alternative Names: iAPX 386, 386, i386 Alternative Names: Pentium, 80586, 586, i586 Alternative Names: Pentium 4, Pentium IV, P4 Alternative Names: SKL (Desktop and Mobile), SKX (Server) Series: Pentium Pro (used in desktops and servers) • 16-bit data bus: 8086 (iAPX Series: Series: Series: Series: • Variant: Klamath (1997, 0.35 μm) 86) • Desktop/Server: i386DX Desktop/Server: P5, P54C • Desktop: Willamette (180 nm) • Desktop: Desktop 6th Generation Core i5 (Skylake-S and Skylake-H) • Alternative Names: Pentium II, PII • 8-bit data bus: 8088 (iAPX • Desktop lower-performance: i386SX Desktop/Server higher-performance: P54CQS, P54CS • Desktop higher-performance: Northwood Pentium 4 (130 nm), Northwood B Pentium 4 HT (130 nm), • Desktop higher-performance: Desktop 6th Generation Core i7 (Skylake-S and Skylake-H), Desktop 7th Generation Core i7 X (Skylake-X), • Series: Klamath (used in desktops) 88) • Mobile: i386SL, 80376, i386EX, Mobile: P54C, P54LM Northwood C Pentium 4 HT (130 nm), Gallatin (Pentium 4 Extreme Edition 130 nm) Desktop 7th Generation Core i9 X (Skylake-X), Desktop 9th Generation Core i7 X (Skylake-X), Desktop 9th Generation Core i9 X (Skylake-X) • Variant: Deschutes (1998, 0.25 to 0.18 μm) i386CXSA, i386SXSA, i386CXSB Compatibility: Pentium OverDrive • Desktop lower-performance: Willamette-128 -

Overview of IA-32 Assembly Programming
Overview of IA-32 assembly programming Lars Ailo Bongo University of Tromsø Contents 1 Introduction ...................................................................................................................... 2 2 IA-32 assembly programming.......................................................................................... 3 2.1 Assembly Language Statements................................................................................ 3 2.1 Modes........................................................................................................................4 2.2 Registers....................................................................................................................4 2.2.3 Data Registers .................................................................................................... 4 2.2.4 Pointer and Index Registers................................................................................ 4 2.2.5 Control Registers................................................................................................ 5 2.2.6 Segment registers ............................................................................................... 7 2.3 Addressing................................................................................................................. 7 2.3.1 Bit and Byte Order ............................................................................................. 7 2.3.2 Data Types......................................................................................................... -
The 8086 Microprocessor
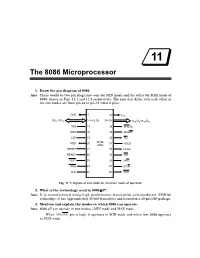
11 The 8086 Microprocessor 1. Draw the pin diagram of 8086. Ans. There would be two pin diagrams—one for MIN mode and the other for MAX mode of 8086, shown in Figs. 11.1 and 11.2 respectively. The pins that differ with each other in the two modes are from pin-24 to pin-31 (total 8 pins). GND 1 40 VCC AD –AD 35–38 0 15 2–16 & 39 A/S16 3–A/S 19 6 NMI 17 34 BHE/S7 INTR 18 33 MN/MX CLK 19 32 RD INTEL GND 20 31 HOLD 8086 RESET 21 30 HLDA READY 22 29 WR TEST 23 28 M/IO INTA 24 27 DT/R ALE 25 26 DEN Fig. 11.1: Signals of intel 8086 for minimum mode of operation 2. What is the technology used in 8086 µµµP? Ans. It is manufactured using high performance metal-oxide semiconductor (HMOS) technology. It has approximately 29,000 transistors and housed in a 40-pin DIP package. 3. Mention and explain the modes in which 8086 can operate. Ans. 8086 µP can operate in two modes—MIN mode and MAX mode. When MN/MX pin is high, it operates in MIN mode and when low, 8086 operates in MAX mode. 194 Understanding 8085/8086 Microprocessors and Peripheral ICs through Questions and Answers For a small system in which only one 8086 microprocessor is employed as a CPU, the system operates in MIN mode (Uniprocessor). While if more than one 8086 operate in a system then it is said to operate in MAX mode (Multiprocessor). -

Technical Product Summary Classic/PCI I486 Baby-AT Motherboard
INTEL OEM PRODUCTS AND SERVICES DIVISION PRELIMINARY - REV 0.1 ® Technical Product Summary Classic/PCI i486TM Baby-AT Motherboard Models: BP4S33AT BP4D33AT BP4D266AT Preliminary Version 0.1 April, 1993 Order Number PRELIMINARY Classic/PCI i486 Baby-AT Motherboard Technical Product Summary · Page 1 INTEL OEM PRODUCTS AND SERVICES DIVISION PRELIMINARY - REV 0.1 Intel Corporation makes no warranty for the use of its products and assumes no responsibility for any errors which may appear in this document nor does it make a commitment to update the information contained herein. Intel Corporation retains the right to make changes to these specifications at any time, without notice. Contact your local sales office to obtain the latest specifications before placing your order. The following are trademarks of Intel Corporation and may only be used to identify Intel products: 376Ô i750â MAPNETÔ AboveÔ i860Ô MatchedÔ ActionMediaâ i960â MCSâ BITBUSÔ Intel287Ô Media MailÔ Code BuilderÔ Intel386Ô NetPortÔ DeskWareÔ Intel387Ô NetSentryÔ Digital StudioÔ Intel486Ô OpenNETÔ DVIâ Intel487Ô OverDriveÔ EtherExpressÔ Intelâ ParagonÔ ETOXÔ intel inside.Ô PentiumÔ ExCAÔ Intellecâ ProSolverÔ Exchange and GoÔ iPSCâ READY-LANÔ FaxBACKÔ iRMXâ Reference Pointâ FlashFileÔ iSBCâ RMX/80Ô Grand ChallengeÔ iSBXÔ RxServerÔ iâ iWARPÔ SatisFAXtionâ ICEÔ LANDeskÔ SnapIn 386Ô iLBXÔ LANPrintâ Storage BrokerÔ InboardÔ LANProtectÔ SuperTunedÔ i287Ô LANSelectâ The Computer Inside.Ô i386Ô LANShellâ TokenExpressÔ i387Ô LANSightÔ Visual EdgeÔ i486Ô LANSpaceâ WYPIWYFâ i487Ô LANSpoolâ IntelTechDirectÔ MDS is an ordering code only and is not used as a product name or trademark. MDS is a registered trademark of Mohawk Data Sciences Corporation. CHMOS and HMOS are patented processes of Intel Corp. Intel Corporation and Intel's FASTPATH are not affiliated with Kinetics, a division of Excelan, Inc. -

Optimizing Subroutines in Assembly Language an Optimization Guide for X86 Platforms
2. Optimizing subroutines in assembly language An optimization guide for x86 platforms By Agner Fog. Copenhagen University College of Engineering. Copyright © 1996 - 2012. Last updated 2012-02-29. Contents 1 Introduction ....................................................................................................................... 4 1.1 Reasons for using assembly code .............................................................................. 5 1.2 Reasons for not using assembly code ........................................................................ 5 1.3 Microprocessors covered by this manual .................................................................... 6 1.4 Operating systems covered by this manual................................................................. 7 2 Before you start................................................................................................................. 7 2.1 Things to decide before you start programming .......................................................... 7 2.2 Make a test strategy.................................................................................................... 9 2.3 Common coding pitfalls............................................................................................. 10 3 The basics of assembly coding........................................................................................ 12 3.1 Assemblers available ................................................................................................ 12 3.2 Register set