The 8086 Microprocessor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -

(PSW). Seven Bits Remain Unused While the Rest Nine Are Used
8086/8088MP INSTRUCTOR: ABDULMUTTALIB A. H. ALDOURI The Flags Register It is a 16-bit register, also called Program Status Word (PSW). Seven bits remain unused while the rest nine are used. Six are status flags and three are control flags. The control flags can be set/reset by the programmer. 1. DF (Direction Flag) : controls the direction of operation of string instructions. (DF=0 Ascending order DF=1 Descending order) 2. IF (Interrupt Flag): controls the interrupt operation in 8086µP. (IF=0 Disable interrupt IF=1 Enable interrupt) 3. TF (Trap Flag): controls the operation of the microprocessor. (TF=0 Normal operation TF=1 Single Step operation) The status flags are set/reset depending on the results of some arithmetic or logical operations during program execution. 1. CF (Carry Flag) is set (CF=1) if there is a carry out of the MSB position resulting from an addition operation or subtraction. 2. AF (Auxiliary Carry Flag) AF is set if there is a carry out of bit 3 resulting from an addition operation. 3. SF (Sign Flag) set to 1 when result is negative. When result is positive it is set to 0. 4. ZF (Zero Flag) is set (ZF=1) when result of an arithmetic or logical operation is zero. For non-zero result this flag is reset (ZF=0). 5. PF (Parity Flag) this flag is set to 1 when there is even number of one bits in result, and to 0 when there is odd number of one bits. 6. OF (Overflow Flag) set to 1 when there is a signed overflow. -

Overview of IA-32 Assembly Programming
Overview of IA-32 assembly programming Lars Ailo Bongo University of Tromsø Contents 1 Introduction ...................................................................................................................... 2 2 IA-32 assembly programming.......................................................................................... 3 2.1 Assembly Language Statements................................................................................ 3 2.1 Modes........................................................................................................................4 2.2 Registers....................................................................................................................4 2.2.3 Data Registers .................................................................................................... 4 2.2.4 Pointer and Index Registers................................................................................ 4 2.2.5 Control Registers................................................................................................ 5 2.2.6 Segment registers ............................................................................................... 7 2.3 Addressing................................................................................................................. 7 2.3.1 Bit and Byte Order ............................................................................................. 7 2.3.2 Data Types......................................................................................................... -

Optimizing Subroutines in Assembly Language an Optimization Guide for X86 Platforms
2. Optimizing subroutines in assembly language An optimization guide for x86 platforms By Agner Fog. Copenhagen University College of Engineering. Copyright © 1996 - 2012. Last updated 2012-02-29. Contents 1 Introduction ....................................................................................................................... 4 1.1 Reasons for using assembly code .............................................................................. 5 1.2 Reasons for not using assembly code ........................................................................ 5 1.3 Microprocessors covered by this manual .................................................................... 6 1.4 Operating systems covered by this manual................................................................. 7 2 Before you start................................................................................................................. 7 2.1 Things to decide before you start programming .......................................................... 7 2.2 Make a test strategy.................................................................................................... 9 2.3 Common coding pitfalls............................................................................................. 10 3 The basics of assembly coding........................................................................................ 12 3.1 Assemblers available ................................................................................................ 12 3.2 Register set -

Intel X86 Assembly Language & Microarchitecture
Intel x86 Assembly Language & Microarchitecture #x86 Table of Contents About 1 Chapter 1: Getting started with Intel x86 Assembly Language & Microarchitecture 2 Remarks 2 Examples 2 x86 Assembly Language 2 x86 Linux Hello World Example 3 Chapter 2: Assemblers 6 Examples 6 Microsoft Assembler - MASM 6 Intel Assembler 6 AT&T assembler - as 7 Borland's Turbo Assembler - TASM 7 GNU assembler - gas 7 Netwide Assembler - NASM 8 Yet Another Assembler - YASM 9 Chapter 3: Calling Conventions 10 Remarks 10 Resources 10 Examples 10 32-bit cdecl 10 Parameters 10 Return Value 11 Saved and Clobbered Registers 11 64-bit System V 11 Parameters 11 Return Value 11 Saved and Clobbered Registers 11 32-bit stdcall 12 Parameters 12 Return Value 12 Saved and Clobbered Registers 12 32-bit, cdecl — Dealing with Integers 12 As parameters (8, 16, 32 bits) 12 As parameters (64 bits) 12 As return value 13 32-bit, cdecl — Dealing with Floating Point 14 As parameters (float, double) 14 As parameters (long double) 14 As return value 15 64-bit Windows 15 Parameters 15 Return Value 16 Saved and Clobbered Registers 16 Stack alignment 16 32-bit, cdecl — Dealing with Structs 16 Padding 16 As parameters (pass by reference) 17 As parameters (pass by value) 17 As return value 17 Chapter 4: Control Flow 19 Examples 19 Unconditional jumps 19 Relative near jumps 19 Absolute indirect near jumps 19 Absolute far jumps 19 Absolute indirect far jumps 20 Missing jumps 20 Testing conditions 20 Flags 21 Non-destructive tests 21 Signed and unsigned tests 22 Conditional jumps 22 Synonyms and terminology 22 Equality 22 Greater than 23 Less than 24 Specific flags 24 One more conditional jump (extra one) 25 Test arithmetic relations 25 Unsigned integers 25 Signed integers 26 a_label 26 Synonyms 27 Signed unsigned companion codes 27 Chapter 5: Converting decimal strings to integers 28 Remarks 28 Examples 28 IA-32 assembly, GAS, cdecl calling convention 28 MS-DOS, TASM/MASM function to read a 16-bit unsigned integer 29 Read a 16-bit unsigned integer from input. -

Implicitly Modified Registers
24592—Rev. 3.14—September 2007 AMD64 Technology Table 3-1. Implicit Uses of GPRs Registers 1 Name Implicit Uses Low 8-Bit 16-Bit 32-Bit 64-Bit • Operand for decimal arithmetic, multiply, divide, string, compare-and- exchange, table-translation, and I/O instructions. 2 • Special accumulator encoding AL AX EAX RAX Accumulator for ADD, XOR, and MOV instructions. • Used with EDX to hold double- precision operands. • CPUID processor-feature information. • Address generation in 16-bit code. • Memory address for XLAT BL BX EBX RBX 2 Base instruction. • CPUID processor-feature information. • Bit index for shift and rotate instructions. • Iteration count for loop and CL CX ECX RCX 2 Count repeated string instructions. • Jump conditional if zero. • CPUID processor-feature information. • Operand for multiply and divide instructions. • Port number for I/O instructions. DL DX EDX RDX 2 I/O Address • Used with EAX to hold double- precision operands. • CPUID processor-feature information. • Memory address of source operand for string instructions. SIL 2 SI ESI RSI 2 Source Index • Memory index for 16-bit addresses. Note: 1. Gray-shaded registers have no implicit uses. 2. Accessible only in 64-bit mode. General-Purpose Programming 31 AMD64 Technology 24592—Rev. 3.14—September 2007 Table 3-1. Implicit Uses of GPRs (continued) Registers 1 Name Implicit Uses Low 8-Bit 16-Bit 32-Bit 64-Bit • Memory address of destination Destination operand for string instructions. DIL 2 DI EDI RDI 2 Index • Memory index for 16-bit addresses. • Memory address of stack- BPL 2 BP EBP RBP 2 Base Pointer frame base pointer. -

Assembly Language Tutorial
Assembly Language Tutorial ASSEMBLY LANGUAGE TUTORIAL Simply Easy Learning by tutorialspoint.com tutorialspoint.com i ABOUT THE TUTORIAL Assembly Programming Tutorial Assembly language is a low-level programming language for a computer, or other programmable device specific to a particular computer architecture in contrast to most high- level programming languages, which are generally portable across multiple systems. Assembly language is converted into executable machine code by a utility program referred to as an assembler like NASM, MASM etc. Audience This tutorial has been designed for software programmers with a need to understand the Assembly programming language starting from scratch. This tutorial will give you enough understanding on Assembly programming language from where you can take yourself at higher level of expertise. Prerequisites Before proceeding with this tutorial you should have a basic understanding of Computer Programming terminologies. A basic understanding of any of the programming languages will help you in understanding the Assembly programming concepts and move fast on the learning track. TUTORIALS POINT Simply Easy Learning Copyright & Disclaimer Notice All the content and graphics on this tutorial are the property of tutorialspoint.com. Any content from tutorialspoint.com or this tutorial may not be redistributed or reproduced in any way, shape, or form without the written permission of tutorialspoint.com. Failure to do so is a violation of copyright laws. This tutorial may contain inaccuracies or errors and tutorialspoint provides no guarantee regarding the accuracy of the site or its contents including this tutorial. If you discover that the tutorialspoint.com site or this tutorial content contains some errors, please contact us at [email protected] TUTORIALS POINT Simply Easy Learning Table of Content Assembly Programming Tutorial ............................................. -
Introduction
IBM 6x86 MICROPROCRSSOR Sixth-Generation Superscalar Superpipelined x86-Compatible CPU Introduction S i x t h - G e n e r a t i o n S u p e r s c a l a r Optimum Performance for Superpipelined Architecture Windows®95 - Dual 7-stage integer pipelines - Intelligent instruction dispatch - High performance on-chip FPU with 64-bit interface - Out-of-order completion - Operating frequencies of 100 MHz and above - Register renaming - 16-KByte write-back cache - Data forwarding - Branch prediction X86 Instruction Set Compatible - Speculative execution - Runs Windows 95, Windows NT, DOS, UNIX, 64-Bit Data Bus Novell, OS/2, Solaris, and others - P54C socket compatible for quick time to market The IBM 6x86** microprocessor is a superscalar, timing constraints and allows the IBM 6x86 CPU to superpipelined CPU that provides sixth-generation operate at core frequencies starting at 100 MHz. In performance for x86 software. Since the IBM 6x86 addition, the IBM 6x86 CPU’s integer and floating CPU is fully compatible with the x86 instruction set, point units are optimized for maximum instruction it is capable of executing a wide range of existing throughput by using advanced architectural operating systems and applications, including techniques, including register renaming, Windows 95, DOS, Unix, Windows NT, Novell, out-of-order execution, data forwarding, branch OS/2, and Solaris. The IBM 6x86 CPU achieves top prediction, and speculative execution. These design performance levels through the use of two optimized innovations eliminate many data dependencies and superpipelined integer units and an on-chip floating resource conflicts that provide optimum point unit. -
Instruction Format
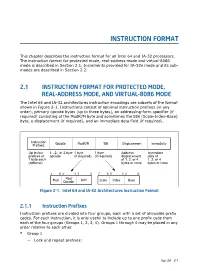
INSTRUCTION FORMAT This chapter describes the instruction format for all Intel 64 and IA-32 processors. The instruction format for protected mode, real-address mode and virtual-8086 mode is described in Section 2.1. Increments provided for IA-32e mode and its sub- modes are described in Section 2.2. 2.1 INSTRUCTION FORMAT FOR PROTECTED MODE, REAL-ADDRESS MODE, AND VIRTUAL-8086 MODE The Intel 64 and IA-32 architectures instruction encodings are subsets of the format shown in Figure 2-1. Instructions consist of optional instruction prefixes (in any order), primary opcode bytes (up to three bytes), an addressing-form specifier (if required) consisting of the ModR/M byte and sometimes the SIB (Scale-Index-Base) byte, a displacement (if required), and an immediate data field (if required). Instruction Opcode ModR/M SIB Displacement Immediate Prefixes Up to four 1-, 2-, or 3-byte 1 byte 1 byte Address Immediate prefixes of opcode (if required) (if required) displacement data of 1 byte each of 1, 2, or 4 1, 2, or 4 (optional) bytes or none bytes or none 7 65 3 2 0 7 65 32 0 Reg/ Mod Opcode R/M Scale Index Base Figure 2-1. Intel 64 and IA-32 Architectures Instruction Format 2.1.1 Instruction Prefixes Instruction prefixes are divided into four groups, each with a set of allowable prefix codes. For each instruction, it is only useful to include up to one prefix code from each of the four groups (Groups 1, 2, 3, 4). Groups 1 through 4 may be placed in any order relative to each other. -

Program Counter Holds the Address of Either the First Byte of the Next
What is a Microprocessor? Microprocessor is a program-controlled device, which fetches the instructions from memory, decodes and executes the instructions. Most Micro Processor are single- chip devices. What are the flags in 8086? In 8086 Carry flag, Parity flag, Auxiliary carry flag, Zero flag, Overflow flag, Trace flag, Interrupt flag, Direction flag, and Sign flag. Why crystal is a preferred clock source? Because of high stability, large Q (Quality Factor) & the frequency that doesn’t drift with aging. Crystal is used as a clock source most of the times. In 8085 which is called as High order / Low order Register? Flag is called as Low order register & Accumulator is called as High order Register. What is Tri-state logic? Three Logic Levels are used and they are High, Low, High impedance state. The high and low are normal logic levels & high impedance state is electrical open circuit conditions. Tri-state logic has a third line called enable line. What happens when HLT instruction is executed in processor? The Micro Processor enters into Halt-State and the buses are tri-stated. Which Stack is used in 8085? LIFO (Last In First Out) stack is used in 8085.In this type of Stack the last stored information can be retrieved first What is Program counter? Program counter holds the address of either the first byte of the next instruction to be fetched for execution or the address of the next byte of a multi byte instruction, which has not been completelyfetched. In both the cases it gets incremented automatically one by one as the instruction bytes get fetched. -

Term 2 Lecture 6
Assembly Language J. Vaughan Lecture Notes on Assembly Language - J. Vaughan 13. Instructions and data (ctd) From the NASM Manual: AND: Bitwise AND AND r/m8,reg8 ; 20 /r [8086] AND r/m16,reg16 ; o16 21 /r [8086] AND r/m32,reg32 ; o32 21 /r [386] AND reg8,r/m8 ; 22 /r [8086] AND reg16,r/m16 ; o16 23 /r [8086] AND reg32,r/m32 ; o32 23 /r [386] AND r/m8,imm8 ; 80 /4 ib [8086] AND r/m16,imm16 ; o16 81 /4 iw [8086] AND r/m32,imm32 ; o32 81 /4 id [386] AND r/m16,imm8 ; o16 83 /4 ib [8086] AND r/m32,imm8 ; o32 83 /4 ib [386] AND AL,imm8 ; 24 ib [8086] AND AX,imm16 ; o16 25 iw [8086] AND EAX,imm32 ; o32 25 id [386] AND performs a bitwise AND operation between its two operands (i.e. each bit of the result is 1 if and only if the corresponding bits of the two inputs were both 1), and stores the result in the destination (first) operand. The destination operand can be a register or a memory location. The source operand can be a register, a memory location or an immediate value. In the forms with an 8−bit immediate second operand and a longer first operand, the second operand is considered to be signed, and is sign−extended to the length of the first operand. In these cases, the BYTE qualifier is necessary to force NASM to generate this form of the instruction. CALL: Call Subroutine CALL imm ; E8 rw/rd [8086] CALL imm:imm16 ; o16 9A iw iw [8086] CALL imm:imm32 ; o32 9A id iw [386] CALL FAR mem16 ; o16 FF /3 [8086] CALL FAR mem32 ; o32 FF /3 [386] CALL r/m16 ; o16 FF /2 [8086] CALL r/m32 ; o32 FF /2 [386] CALL calls a subroutine, by means of pushing the current instruction pointer (IP) and optionally CS as well on the stack, and then jumping to a given address. -

X86 Assembly Language Reference Manual
x86 Assembly Language Reference Manual Sun Microsystems, Inc. 901 N. San Antonio Road Palo Alto, CA 94303-4900 U.S.A. Part No: 805-4693-10 October 1998 Copyright 1998 Sun Microsystems, Inc. 901 San Antonio Road, Palo Alto, California 94303-4900 U.S.A. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution, and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, SunDocs, Java, the Java Coffee Cup logo, and Solaris are trademarks, registered trademarks, or service marks of Sun Microsystems, Inc. in the U.S. and other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. in the U.S. and other countries. Products bearing SPARC trademarks are based upon an architecture developed by Sun Microsystems, Inc. The OPEN LOOK and SunTM Graphical User Interface was developed by Sun Microsystems, Inc. for its users and licensees. Sun acknowledges the pioneering efforts of Xerox in researching and developing the concept of visual or graphical user interfaces for the computer industry. Sun holds a non-exclusive license from Xerox to the Xerox Graphical User Interface, which license also covers Sun’s licensees who implement OPEN LOOK GUIs and otherwise comply with Sun’s written license agreements.