PC Assembly Language
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
E0C88 CORE CPU MANUAL NOTICE No Part of This Material May Be Reproduced Or Duplicated in Any Form Or by Any Means Without the Written Permission of Seiko Epson
MF658-04 CMOS 8-BIT SINGLE CHIP MICROCOMPUTER E0C88 Family E0C88 CORE CPU MANUAL NOTICE No part of this material may be reproduced or duplicated in any form or by any means without the written permission of Seiko Epson. Seiko Epson reserves the right to make changes to this material without notice. Seiko Epson does not assume any liability of any kind arising out of any inaccuracies contained in this material or due to its application or use in any product or circuit and, further, there is no representation that this material is applicable to products requiring high level reliability, such as medical products. Moreover, no license to any intellectual property rights is granted by implication or otherwise, and there is no representation or warranty that anything made in accordance with this material will be free from any patent or copyright infringement of a third party. This material or portions thereof may contain technology or the subject relating to strategic products under the control of the Foreign Exchange and Foreign Trade Control Law of Japan and may require an export license from the Ministry of International Trade and Industry or other approval from another government agency. Please note that "E0C" is the new name for the old product "SMC". If "SMC" appears in other manuals understand that it now reads "E0C". © SEIKO EPSON CORPORATION 1999 All rights reserved. CONTENTS E0C88 Core CPU Manual PREFACE This manual explains the architecture, operation and instruction of the core CPU E0C88 of the CMOS 8-bit single chip microcomputer E0C88 Family. Also, since the memory configuration and the peripheral circuit configuration is different for each device of the E0C88 Family, you should refer to the respective manuals for specific details other than the basic functions. -

6.004 Computation Structures Spring 2009
MIT OpenCourseWare http://ocw.mit.edu 6.004 Computation Structures Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. M A S S A C H U S E T T S I N S T I T U T E O F T E C H N O L O G Y DEPARTMENT OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE 6.004 Computation Structures β Documentation 1. Introduction This handout is a reference guide for the β, the RISC processor design for 6.004. This is intended to be a complete and thorough specification of the programmer-visible state and instruction set. 2. Machine Model The β is a general-purpose 32-bit architecture: all registers are 32 bits wide and when loaded with an address can point to any location in the byte-addressed memory. When read, register 31 is always 0; when written, the new value is discarded. Program Counter Main Memory PC always a multiple of 4 0x00000000: 3 2 1 0 0x00000004: 32 bits … Registers SUB(R3,R4,R5) 232 bytes R0 ST(R5,1000) R1 … … R30 0xFFFFFFF8: R31 always 0 0xFFFFFFFC: 32 bits 32 bits 3. Instruction Encoding Each β instruction is 32 bits long. All integer manipulation is between registers, with up to two source operands (one may be a sign-extended 16-bit literal), and one destination register. Memory is referenced through load and store instructions that perform no other computation. Conditional branch instructions are separated from comparison instructions: branch instructions test the value of a register that can be the result of a previous compare instruction. -

ARM Instruction Set
4 ARM Instruction Set This chapter describes the ARM instruction set. 4.1 Instruction Set Summary 4-2 4.2 The Condition Field 4-5 4.3 Branch and Exchange (BX) 4-6 4.4 Branch and Branch with Link (B, BL) 4-8 4.5 Data Processing 4-10 4.6 PSR Transfer (MRS, MSR) 4-17 4.7 Multiply and Multiply-Accumulate (MUL, MLA) 4-22 4.8 Multiply Long and Multiply-Accumulate Long (MULL,MLAL) 4-24 4.9 Single Data Transfer (LDR, STR) 4-26 4.10 Halfword and Signed Data Transfer 4-32 4.11 Block Data Transfer (LDM, STM) 4-37 4.12 Single Data Swap (SWP) 4-43 4.13 Software Interrupt (SWI) 4-45 4.14 Coprocessor Data Operations (CDP) 4-47 4.15 Coprocessor Data Transfers (LDC, STC) 4-49 4.16 Coprocessor Register Transfers (MRC, MCR) 4-53 4.17 Undefined Instruction 4-55 4.18 Instruction Set Examples 4-56 ARM7TDMI-S Data Sheet 4-1 ARM DDI 0084D Final - Open Access ARM Instruction Set 4.1 Instruction Set Summary 4.1.1 Format summary The ARM instruction set formats are shown below. 3 3 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 9876543210 1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0 Cond 0 0 I Opcode S Rn Rd Operand 2 Data Processing / PSR Transfer Cond 0 0 0 0 0 0 A S Rd Rn Rs 1 0 0 1 Rm Multiply Cond 0 0 0 0 1 U A S RdHi RdLo Rn 1 0 0 1 Rm Multiply Long Cond 0 0 0 1 0 B 0 0 Rn Rd 0 0 0 0 1 0 0 1 Rm Single Data Swap Cond 0 0 0 1 0 0 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 Rn Branch and Exchange Cond 0 0 0 P U 0 W L Rn Rd 0 0 0 0 1 S H 1 Rm Halfword Data Transfer: register offset Cond 0 0 0 P U 1 W L Rn Rd Offset 1 S H 1 Offset Halfword Data Transfer: immediate offset Cond 0 -

2. Assembly Language Assembly Language Is a Programming Language That Is Very Similar to Machine Language, but Uses Symbols Instead of Binary Numbers
2. Assembly Language Assembly Language is a programming language that is very similar to machine language, but uses symbols instead of binary numbers. It is converted by the assembler into executable machine- language programs. Assembly language is machine-dependent; an assembly program can only be executed on a particular machine. 2.1 Introduction to Assembly Language Tools Practical assembly language programs can, in general, be written using one of the two following methods: 1- The full-segment definition form 2- The simplified segment definition form In both methods, the source program includes two types of instructions: real instructions, and pseudo instructions. Real instructions such as MOV and ADD are the actual instructions that are translated by the assembler into machine code for execution by the CPU. Pseudo instructions, on the other hand, don’t generate machine code and are only used to give directions to the assembler about how it should translate the assembly language instructions into machine code. The assembler program converts the written assembly language file (called source file) into machine code file (called object file). Another program, known as the linker, converts the object file into an executable file for practical run. It also generates a special file called the map file which is used to get the offset addresses of the segments in the main assembly program as shown in figure 1. Other tools needed in assembling coding include a debugger, and an editor as shown in figure 2 Figure 2. Program Development Procedure There are several commercial assemblers available like the Microsoft Macro Assembler (MASM), and the Borland Turbo Assembler (TASM). -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -
NASM – the Netwide Assembler
NASM – The Netwide Assembler version 2.14rc7 © 1996−2017 The NASM Development Team — All Rights Reserved This document is redistributable under the license given in the file "LICENSE" distributed in the NASM archive. Contents Chapter 1: Introduction . 17 1.1 What Is NASM?. 17 1.1.1 License Conditions . 17 Chapter 2: Running NASM . 19 2.1 NASM Command−Line Syntax . 19 2.1.1 The −o Option: Specifying the Output File Name . 19 2.1.2 The −f Option: Specifying the Output File Format . 20 2.1.3 The −l Option: Generating a Listing File . 20 2.1.4 The −M Option: Generate Makefile Dependencies. 20 2.1.5 The −MG Option: Generate Makefile Dependencies . 20 2.1.6 The −MF Option: Set Makefile Dependency File. 20 2.1.7 The −MD Option: Assemble and Generate Dependencies . 20 2.1.8 The −MT Option: Dependency Target Name . 21 2.1.9 The −MQ Option: Dependency Target Name (Quoted) . 21 2.1.10 The −MP Option: Emit phony targets . 21 2.1.11 The −MW Option: Watcom Make quoting style . 21 2.1.12 The −F Option: Selecting a Debug Information Format . 21 2.1.13 The −g Option: Enabling Debug Information. 21 2.1.14 The −X Option: Selecting an Error Reporting Format . 21 2.1.15 The −Z Option: Send Errors to a File. 22 2.1.16 The −s Option: Send Errors to stdout ..........................22 2.1.17 The −i Option: Include File Search Directories . 22 2.1.18 The −p Option: Pre−Include a File . 22 2.1.19 The −d Option: Pre−Define a Macro . -

Assembly Language
Assembly Language University of Texas at Austin CS310H - Computer Organization Spring 2010 Don Fussell Human-Readable Machine Language Computers like ones and zeros… 0001110010000110 Humans like symbols… ADD R6,R2,R6 ; increment index reg. Assembler is a program that turns symbols into machine instructions. ISA-specific: close correspondence between symbols and instruction set mnemonics for opcodes labels for memory locations additional operations for allocating storage and initializing data University of Texas at Austin CS310H - Computer Organization Spring 2010 Don Fussell 2 An Assembly Language Program ; ; Program to multiply a number by the constant 6 ; .ORIG x3050 LD R1, SIX LD R2, NUMBER AND R3, R3, #0 ; Clear R3. It will ; contain the product. ; The inner loop ; AGAIN ADD R3, R3, R2 ADD R1, R1, #-1 ; R1 keeps track of BRp AGAIN ; the iteration. ; HALT ; NUMBER .BLKW 1 SIX .FILL x0006 ; .END University of Texas at Austin CS310H - Computer Organization Spring 2010 Don Fussell 3 LC-3 Assembly Language Syntax Each line of a program is one of the following: an instruction an assember directive (or pseudo-op) a comment Whitespace (between symbols) and case are ignored. Comments (beginning with “;”) are also ignored. An instruction has the following format: LABEL OPCODE OPERANDS ; COMMENTS optional mandatory University of Texas at Austin CS310H - Computer Organization Spring 2010 Don Fussell 4 Opcodes and Operands Opcodes reserved symbols that correspond to LC-3 instructions listed in Appendix A ex: ADD, AND, LD, LDR, … Operands registers -

Basic Processor Implementation Jinyang Li What We’Ve Learnt So Far
Basic Processor Implementation Jinyang Li What we’ve learnt so far • Combinatorial logic • Truth table • ROM • ALU • Sequential logic • Clocks • Basic state elements (SR latch, D latch, flip-flop) Clocked Clocked unclocked (Level (edge triggered) triggered) Today’s lesson plan • Implement a basic CPU Our CPU will be based on RISC-V instead of x86 • 3 popular ISAs now ISA Key advantage Who builds the Where are the processors processors? used? x86 Fast Intel, AMD Server (Cloud), Desktop, CISC Laptop, Xbox console Complex Instruction Set ARM Low power (everybody can license the Samsung, NVIDIA, Phones, Tablets, Nintendo design from ARM Holdings for $$$) Qualcomm, Broadcom, console, Raspberry Pi RISC Huawei/HiSilicon Reduced RISC-V Open source, royalty-free Western digital, Alibaba Devices (e.g. SSD controllers) Instruction Set RISC-V at a high level RISC-V X86-64 # of registers 32 16 similarities Memory Byte-addressable, Byte-addressable, Little Endian Little Endian Why RISC-V is much simpler? Fewer instructions 50+ (200 manual pages) 1000+ (2306 manual pages) Simpler instruction encoding 4-byte Variable length Simpler instructions • Ld/st instructions • Instructions take either load/store memory to memory or register operands or from register • Complex memory addressing • Other instructions take modes D(B, I, S) only register operands • Prefixes modify instruction behavior Basic RISC-V instructions Registers: x0, x1, x2,…, x31 64-bit Data transfer load doubleword ld x5, 40(x6) x5=Memory[x6+40] store doubleword sd x5, 40(x6) Memory[x6+40]=x5 -

(PSW). Seven Bits Remain Unused While the Rest Nine Are Used
8086/8088MP INSTRUCTOR: ABDULMUTTALIB A. H. ALDOURI The Flags Register It is a 16-bit register, also called Program Status Word (PSW). Seven bits remain unused while the rest nine are used. Six are status flags and three are control flags. The control flags can be set/reset by the programmer. 1. DF (Direction Flag) : controls the direction of operation of string instructions. (DF=0 Ascending order DF=1 Descending order) 2. IF (Interrupt Flag): controls the interrupt operation in 8086µP. (IF=0 Disable interrupt IF=1 Enable interrupt) 3. TF (Trap Flag): controls the operation of the microprocessor. (TF=0 Normal operation TF=1 Single Step operation) The status flags are set/reset depending on the results of some arithmetic or logical operations during program execution. 1. CF (Carry Flag) is set (CF=1) if there is a carry out of the MSB position resulting from an addition operation or subtraction. 2. AF (Auxiliary Carry Flag) AF is set if there is a carry out of bit 3 resulting from an addition operation. 3. SF (Sign Flag) set to 1 when result is negative. When result is positive it is set to 0. 4. ZF (Zero Flag) is set (ZF=1) when result of an arithmetic or logical operation is zero. For non-zero result this flag is reset (ZF=0). 5. PF (Parity Flag) this flag is set to 1 when there is even number of one bits in result, and to 0 when there is odd number of one bits. 6. OF (Overflow Flag) set to 1 when there is a signed overflow. -
NASM — the Netwide Assembler Version 2.09.04
NASM — The Netwide Assembler version 2.09.04 -~~..~:#;L .-:#;L,.- .~:#:;.T -~~.~:;. .~:;. E8+U *T +U' *T# .97 *L E8+' *;T' *;, D97 `*L .97 '*L "T;E+:, D9 *L *L H7 I# T7 I# "*:. H7 I# I# U: :8 *#+ , :8 T, 79 U: :8 :8 ,#B. .IE, "T;E* .IE, J *+;#:T*" ,#B. .IE, .IE, © 1996−2010 The NASM Development Team — All Rights Reserved This document is redistributable under the license given in the file "LICENSE" distributed in the NASM archive. Contents Chapter 1: Introduction . .15 1.1 What Is NASM? . .15 1.1.1 Why Yet Another Assembler?. .15 1.1.2 License Conditions . .15 1.2 Contact Information . .16 1.3 Installation. .16 1.3.1 Installing NASM under MS−DOS or Windows . .16 1.3.2 Installing NASM under Unix . .17 Chapter 2: Running NASM . .18 2.1 NASM Command−Line Syntax . .18 2.1.1 The −o Option: Specifying the Output File Name . .18 2.1.2 The −f Option: Specifying the Output File Format . .19 2.1.3 The −l Option: Generating a Listing File . .19 2.1.4 The −M Option: Generate Makefile Dependencies . .19 2.1.5 The −MG Option: Generate Makefile Dependencies . .19 2.1.6 The −MF Option: Set Makefile Dependency File . .19 2.1.7 The −MD Option: Assemble and Generate Dependencies. .19 2.1.8 The −MT Option: Dependency Target Name. .20 2.1.9 The −MQ Option: Dependency Target Name (Quoted) . .20 2.1.10 The −MP Option: Emit phony targets. .20 2.1.11 The −F Option: Selecting a Debug Information Format . -

Overview of IA-32 Assembly Programming
Overview of IA-32 assembly programming Lars Ailo Bongo University of Tromsø Contents 1 Introduction ...................................................................................................................... 2 2 IA-32 assembly programming.......................................................................................... 3 2.1 Assembly Language Statements................................................................................ 3 2.1 Modes........................................................................................................................4 2.2 Registers....................................................................................................................4 2.2.3 Data Registers .................................................................................................... 4 2.2.4 Pointer and Index Registers................................................................................ 4 2.2.5 Control Registers................................................................................................ 5 2.2.6 Segment registers ............................................................................................... 7 2.3 Addressing................................................................................................................. 7 2.3.1 Bit and Byte Order ............................................................................................. 7 2.3.2 Data Types......................................................................................................... -
The 8086 Microprocessor
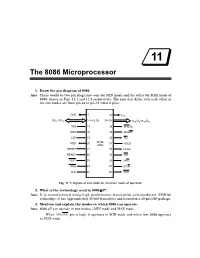
11 The 8086 Microprocessor 1. Draw the pin diagram of 8086. Ans. There would be two pin diagrams—one for MIN mode and the other for MAX mode of 8086, shown in Figs. 11.1 and 11.2 respectively. The pins that differ with each other in the two modes are from pin-24 to pin-31 (total 8 pins). GND 1 40 VCC AD –AD 35–38 0 15 2–16 & 39 A/S16 3–A/S 19 6 NMI 17 34 BHE/S7 INTR 18 33 MN/MX CLK 19 32 RD INTEL GND 20 31 HOLD 8086 RESET 21 30 HLDA READY 22 29 WR TEST 23 28 M/IO INTA 24 27 DT/R ALE 25 26 DEN Fig. 11.1: Signals of intel 8086 for minimum mode of operation 2. What is the technology used in 8086 µµµP? Ans. It is manufactured using high performance metal-oxide semiconductor (HMOS) technology. It has approximately 29,000 transistors and housed in a 40-pin DIP package. 3. Mention and explain the modes in which 8086 can operate. Ans. 8086 µP can operate in two modes—MIN mode and MAX mode. When MN/MX pin is high, it operates in MIN mode and when low, 8086 operates in MAX mode. 194 Understanding 8085/8086 Microprocessors and Peripheral ICs through Questions and Answers For a small system in which only one 8086 microprocessor is employed as a CPU, the system operates in MIN mode (Uniprocessor). While if more than one 8086 operate in a system then it is said to operate in MAX mode (Multiprocessor).