FLAGS Register (Computing) - Wikipedia, the Free Encyclopedia Page 1 of 3
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Automatic Extraction of X86 Formal Semantics from Its Natural Language Description
Automatic extraction of x86 formal semantics from its natural language description NGUYEN, Lam Hoang Yen Graduate School of Advanced Science and Technology Japan Advanced Institute of Science and Technology March, 2018 Master's Thesis Automatic extraction of x86 formal semantics from its natural language description 1610062 NGUYEN, Lam Hoang Yen Supervisor : Professor Mizuhito Ogawa Main Examiner : Professor Mizuhito Ogawa Examiners : Associate Professor Nguyen Minh Le Professor Kazuhiro Ogata Associate Professor Nao Hirokawa Graduate School of Advanced Science and Technology Japan Advanced Institute of Science and Technology [Information Science] February, 2018 Abstract Nowadays, computers have become an essential device of almost every activity for every- body at any age. From personal demands to industrial and business sectors, they are used to improve human life as well as the efficiency and the productivity. The more important they are, the more attractive target they become for being attacked and serving malicious purposes. There are various threats to a computer system. One of the most common manners that penetrates or damages a system with bad impacts to most of the computer users is malware. Malware detection and malware classification are two of the most at- tractive problems in not only industry area but also academic research. The bits-based fingerprint also known as the signature-based pattern recognition is applied popularly in commercial anti-virus software due to its light-weight and fast features. However, it is easily cheated by advanced polymorphic techniques in malware. Therefore, malware analyses based on control flow graph (CFG) have been attracting a lot of attention, e.g., VxClass at Google. -

Simple Computer Example Register Structure
Simple Computer Example Register Structure Read pp. 27-85 Simple Computer • To illustrate how a computer operates, let us look at the design of a very simple computer • Specifications 1. Memory words are 16 bits in length 2. 2 12 = 4 K words of memory 3. Memory can be accessed in one clock cycle 4. Single Accumulator for ALU (AC) 5. Registers are fully connected Simple Computer Continued 4K x 16 Memory MAR 12 MDR 16 X PC 12 ALU IR 16 AC Simple Computer Specifications (continued) 6. Control signals • INCPC – causes PC to increment on clock edge - [PC] +1 PC •ACin - causes output of ALU to be stored in AC • GMDR2X – get memory data register to X - [MDR] X • Read (Write) – Read (Write) contents of memory location whose address is in MAR To implement instructions, control unit must break down the instruction into a series of register transfers (just like a complier must break down C program into a series of machine level instructions) Simple Computer (continued) • Typical microinstruction for reading memory State Register Transfer Control Line(s) Next State 1 [[MAR]] MDR Read 2 • Timing State 1 State 2 During State 1, Read set by control unit CLK - Data is read from memory - MDR changes at the Read beginning of State 2 - Read is completed in one clock cycle MDR Simple Computer (continued) • Study: how to write the microinstructions to implement 3 instructions • ADD address • ADD (address) • JMP address ADD address: add using direct addressing 0000 address [AC] + [address] AC ADD (address): add using indirect addressing 0001 address [AC] + [[address]] AC JMP address 0010 address address PC Instruction Format for Simple Computer IR OP 4 AD 12 AD = address - Two phases to implement instructions: 1. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

MIPS IV Instruction Set
MIPS IV Instruction Set Revision 3.2 September, 1995 Charles Price MIPS Technologies, Inc. All Right Reserved RESTRICTED RIGHTS LEGEND Use, duplication, or disclosure of the technical data contained in this document by the Government is subject to restrictions as set forth in subdivision (c) (1) (ii) of the Rights in Technical Data and Computer Software clause at DFARS 52.227-7013 and / or in similar or successor clauses in the FAR, or in the DOD or NASA FAR Supplement. Unpublished rights reserved under the Copyright Laws of the United States. Contractor / manufacturer is MIPS Technologies, Inc., 2011 N. Shoreline Blvd., Mountain View, CA 94039-7311. R2000, R3000, R6000, R4000, R4400, R4200, R8000, R4300 and R10000 are trademarks of MIPS Technologies, Inc. MIPS and R3000 are registered trademarks of MIPS Technologies, Inc. The information in this document is preliminary and subject to change without notice. MIPS Technologies, Inc. (MTI) reserves the right to change any portion of the product described herein to improve function or design. MTI does not assume liability arising out of the application or use of any product or circuit described herein. Information on MIPS products is available electronically: (a) Through the World Wide Web. Point your WWW client to: http://www.mips.com (b) Through ftp from the internet site “sgigate.sgi.com”. Login as “ftp” or “anonymous” and then cd to the directory “pub/doc”. (c) Through an automated FAX service: Inside the USA toll free: (800) 446-6477 (800-IGO-MIPS) Outside the USA: (415) 688-4321 (call from a FAX machine) MIPS Technologies, Inc. -

Microprocessor's Registers
IT Basics The microprocessor and ASM Prof. Răzvan Daniel Zota, Ph.D. Bucharest University of Economic Studies Faculty of Cybernetics, Statistics and Economic Informatics [email protected] http://zota.ase.ro/itb Contents • Basic microprocessor architecture • Intel microprocessor registers • Instructions – their components and format • Addressing modes (with examples) 2 Basic microprocessor architecture • CPU registers – Special memory locations on the microprocessor chip – Examples: accumulator, counter, FLAGS register • Arithmetic-Logic Unit (ALU) – The place where most of the operations are being made inside the CPU • Bus Interface Unit (BIU) – It controls data and address buses when the main memory is accessed (or data from the cache memory) • Control Unit and instruction set – The CPU has a fixed instruction set for working with (examples: MOV, CMP, JMP) 3 Instruction’s processing • Processing an instruction requires 3 basic steps: 1. Fetching the instruction from memory (fetch) 2. Instruction’s decoding (decode) 3. Instruction’s execution (execute) – implies memory access for the operands and storing the result • Operation mode of an “antique” Intel 8086 Fetch Decode Execute Fetch Decode Execute …... Microprocessor 1 1 1 2 2 2 Busy Idle Busy Busy Idle Busy …... Bus 4 Instruction’s processing • Modern microprocessors may process more instructions simultaneously (pipelining) • Operation of a pipeline microprocessor (from Intel 80486 to our days) Fetch Fetch Fetch Fetch Store Fetch Fetch Read Fetch 1 2 3 4 1 5 6 2 7 Bus Unit Decode Decode -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -
Advanced Computer Architecture
Computer Architecture MTIT C 103 MIPS ISA and Processor Compiled By Afaq Alam Khan Introduction The MIPS architecture is one example of a RISC architecture The MIPS architecture is a register architecture. All arithmetic and logical operations involve only registers (or constants that are stored as part of the instructions). The MIPS architecture also includes several simple instructions for loading data from memory into registers and storing data from registers in memory; for this reason, the MIPS architecture is called a load/store architecture Register ◦ MIPS has 32 integer registers ($0, $1, ....... $30, $31) and 32 floating point registers ($f0, $f1, ....... $f30, $f31) ◦ Size of each register is 32 bits The $k0, $K1, $at, and $gp registers are reserved for os, assembler and global data And are not used by the programmer Miscellaneous Registers ◦ $PC: The $pc or program counter register points to the next instruction to be executed and is automatically updated by the CPU after instruction are executed. This register is not typically accessed directly by user programs ◦ $Status: The $status or status register is the processor status register and is updated after each instruction by the CPU. This register is not typically directly accessed by user programs. ◦ $cause: The $cause or exception cause register is used by the CPU in the event of an exception or unexpected interruption in program control flow. Examples of exceptions include division by 0, attempting to access in illegal memory address, or attempting to execute an invalid instruction (e.g., trying to execute a data item instead of code). ◦ $hi / $lo : The $hi and $lo registers are used by some specialized multiply and divide instructions. -

(PSW). Seven Bits Remain Unused While the Rest Nine Are Used
8086/8088MP INSTRUCTOR: ABDULMUTTALIB A. H. ALDOURI The Flags Register It is a 16-bit register, also called Program Status Word (PSW). Seven bits remain unused while the rest nine are used. Six are status flags and three are control flags. The control flags can be set/reset by the programmer. 1. DF (Direction Flag) : controls the direction of operation of string instructions. (DF=0 Ascending order DF=1 Descending order) 2. IF (Interrupt Flag): controls the interrupt operation in 8086µP. (IF=0 Disable interrupt IF=1 Enable interrupt) 3. TF (Trap Flag): controls the operation of the microprocessor. (TF=0 Normal operation TF=1 Single Step operation) The status flags are set/reset depending on the results of some arithmetic or logical operations during program execution. 1. CF (Carry Flag) is set (CF=1) if there is a carry out of the MSB position resulting from an addition operation or subtraction. 2. AF (Auxiliary Carry Flag) AF is set if there is a carry out of bit 3 resulting from an addition operation. 3. SF (Sign Flag) set to 1 when result is negative. When result is positive it is set to 0. 4. ZF (Zero Flag) is set (ZF=1) when result of an arithmetic or logical operation is zero. For non-zero result this flag is reset (ZF=0). 5. PF (Parity Flag) this flag is set to 1 when there is even number of one bits in result, and to 0 when there is odd number of one bits. 6. OF (Overflow Flag) set to 1 when there is a signed overflow. -

Overview of IA-32 Assembly Programming
Overview of IA-32 assembly programming Lars Ailo Bongo University of Tromsø Contents 1 Introduction ...................................................................................................................... 2 2 IA-32 assembly programming.......................................................................................... 3 2.1 Assembly Language Statements................................................................................ 3 2.1 Modes........................................................................................................................4 2.2 Registers....................................................................................................................4 2.2.3 Data Registers .................................................................................................... 4 2.2.4 Pointer and Index Registers................................................................................ 4 2.2.5 Control Registers................................................................................................ 5 2.2.6 Segment registers ............................................................................................... 7 2.3 Addressing................................................................................................................. 7 2.3.1 Bit and Byte Order ............................................................................................. 7 2.3.2 Data Types......................................................................................................... -
The 8086 Microprocessor
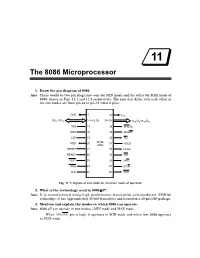
11 The 8086 Microprocessor 1. Draw the pin diagram of 8086. Ans. There would be two pin diagrams—one for MIN mode and the other for MAX mode of 8086, shown in Figs. 11.1 and 11.2 respectively. The pins that differ with each other in the two modes are from pin-24 to pin-31 (total 8 pins). GND 1 40 VCC AD –AD 35–38 0 15 2–16 & 39 A/S16 3–A/S 19 6 NMI 17 34 BHE/S7 INTR 18 33 MN/MX CLK 19 32 RD INTEL GND 20 31 HOLD 8086 RESET 21 30 HLDA READY 22 29 WR TEST 23 28 M/IO INTA 24 27 DT/R ALE 25 26 DEN Fig. 11.1: Signals of intel 8086 for minimum mode of operation 2. What is the technology used in 8086 µµµP? Ans. It is manufactured using high performance metal-oxide semiconductor (HMOS) technology. It has approximately 29,000 transistors and housed in a 40-pin DIP package. 3. Mention and explain the modes in which 8086 can operate. Ans. 8086 µP can operate in two modes—MIN mode and MAX mode. When MN/MX pin is high, it operates in MIN mode and when low, 8086 operates in MAX mode. 194 Understanding 8085/8086 Microprocessors and Peripheral ICs through Questions and Answers For a small system in which only one 8086 microprocessor is employed as a CPU, the system operates in MIN mode (Uniprocessor). While if more than one 8086 operate in a system then it is said to operate in MAX mode (Multiprocessor). -

Optimizing Subroutines in Assembly Language an Optimization Guide for X86 Platforms
2. Optimizing subroutines in assembly language An optimization guide for x86 platforms By Agner Fog. Copenhagen University College of Engineering. Copyright © 1996 - 2012. Last updated 2012-02-29. Contents 1 Introduction ....................................................................................................................... 4 1.1 Reasons for using assembly code .............................................................................. 5 1.2 Reasons for not using assembly code ........................................................................ 5 1.3 Microprocessors covered by this manual .................................................................... 6 1.4 Operating systems covered by this manual................................................................. 7 2 Before you start................................................................................................................. 7 2.1 Things to decide before you start programming .......................................................... 7 2.2 Make a test strategy.................................................................................................... 9 2.3 Common coding pitfalls............................................................................................. 10 3 The basics of assembly coding........................................................................................ 12 3.1 Assemblers available ................................................................................................ 12 3.2 Register set -
Assembly Language: IA-X86
Assembly Language for x86 Processors X86 Processor Architecture CS 271 Computer Architecture Purdue University Fort Wayne 1 Outline Basic IA Computer Organization IA-32 Registers Instruction Execution Cycle Basic IA Computer Organization Since the 1940's, the Von Neumann computers contains three key components: Processor, called also the CPU (Central Processing Unit) Memory and Storage Devices I/O Devices Interconnected with one or more buses Data Bus Address Bus data bus Control Bus registers Processor I/O I/O IA: Intel Architecture Memory Device Device (CPU) #1 #2 32-bit (or i386) ALU CU clock control bus address bus Processor The processor consists of Datapath ALU Registers Control unit ALU (Arithmetic logic unit) Performs arithmetic and logic operations Control unit (CU) Generates the control signals required to execute instructions Memory Address Space Address Space is the set of memory locations (bytes) that are addressable Next ... Basic Computer Organization IA-32 Registers Instruction Execution Cycle Registers Registers are high speed memory inside the CPU Eight 32-bit general-purpose registers Six 16-bit segment registers Processor Status Flags (EFLAGS) and Instruction Pointer (EIP) 32-bit General-Purpose Registers EAX EBP EBX ESP ECX ESI EDX EDI 16-bit Segment Registers EFLAGS CS ES SS FS EIP DS GS General-Purpose Registers Used primarily for arithmetic and data movement mov eax 10 ;move constant integer 10 into register eax Specialized uses of Registers eax – Accumulator register Automatically