Xv6 Booting: Transitioning from 16 to 32 Bit Mode
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
LECTURE NOTE 5: the MEMORY MANAGEMENT REAL MODE Allows the Microprocessor to Address Only the First 1Mbyte of Memory Even If Its Pentium II Microprocessor
LECTURE NOTE 5: THE MEMORY MANAGEMENT REAL MODE Allows the microprocessor to address only the first 1Mbyte of memory even if its Pentium II microprocessor. The first 1Mbyte of memory is called either the real mode or conventional memory system. The DOS operating system requires the microprocessor to operate in this mode. It allows application software. Segment and Offset Through the combination of these two, a memory location is accessed in the real mode. All real mode memory address must consist of a segment address plus an offset address. Segment Address Defines the beginning address of any 64k-byte memory segment. Offset Address Sometimes called displacement or relative. Selects any location within the 64k-byte memory segment. It is the distance above the start of the segment. Note: Each segment register is internally appended with a 0H on its right end. The segment address can begin only at a 16-byte boundary, which is called paragraph. Once the beginning address in known, an ending address is known, by adding FFFFH. The code segment register defines the start of the code segment and the instruction pointer to locate the next instruction within the code segment. This combination (CS:IP or CS:EIP) locates the next instruction executed by the microprocessor. Stack data are referenced through the stack segment at the memory location addressed by either the stack pointer (SP/ESP) or the base pointer (BP/EBP). These combinations are referred to as SS:SP (SS:ESP) or SS:BP (SS:EBP). Addressing Modes 1. Register Addressing Mode transfer a copy of a byte or word from the source register or memory location to the destination register or memory location. -

The Pentium Processor
Chapter 7 The Pentium Processor 7–1 The main purpose of registers is to provide a scratch pad so that the processor can keep data on a temporary basis. For example, the processor may keep the procedure return address, stack pointer, instruction pointer, and so on. Registers are also used to keep the data handy so that it can avoid costly memory accesses. Keeping frequently accessed data in registers is a common compiler optimization technique. 7–2 Pentium supports the following three address spaces: 1. Linear address space 2. Physical address space 3. I/O address space (from discussion in Section 1.7) 7–3 In segmented memory organization, memory is partitioned into segments, where each segment is a small part of the memory. In the real mode, each segment of memory is a linear contiguous sequence of up to 64 KB. In the protected mode, it can be up to 4 GB. Pentium supports segmentation largely to provide backward compatibility to 8086. Note that 8086 is a 16-bit processor with 20 address lines. This mismatch between the processor’s 16-bit registers and 20-bit addresses is solved by using the segmented memory architecture. This segmented architecture has been carried over to Pentium. However, in the protected mode, it is possible to consider the entire memory as a single segment; thus, segmentation is completely turned off. 7–4 In the real mode, a segment is limited to 64 KB due to the fact that 16 bits are used to indicate the offset value into a segment. This magic number 16 is due to the 16-bit registers used 8086 processor. -

Introduction to GNU Octave
Introduction to GNU Octave Hubert Selhofer, revised by Marcel Oliver updated to current Octave version by Thomas L. Scofield 2008/08/16 line 1 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4 8 6 4 2 -8 -6 0 -4 -2 -2 0 -4 2 4 -6 6 8 -8 Contents 1 Basics 2 1.1 What is Octave? ........................... 2 1.2 Help! . 2 1.3 Input conventions . 3 1.4 Variables and standard operations . 3 2 Vector and matrix operations 4 2.1 Vectors . 4 2.2 Matrices . 4 1 2.3 Basic matrix arithmetic . 5 2.4 Element-wise operations . 5 2.5 Indexing and slicing . 6 2.6 Solving linear systems of equations . 7 2.7 Inverses, decompositions, eigenvalues . 7 2.8 Testing for zero elements . 8 3 Control structures 8 3.1 Functions . 8 3.2 Global variables . 9 3.3 Loops . 9 3.4 Branching . 9 3.5 Functions of functions . 10 3.6 Efficiency considerations . 10 3.7 Input and output . 11 4 Graphics 11 4.1 2D graphics . 11 4.2 3D graphics: . 12 4.3 Commands for 2D and 3D graphics . 13 5 Exercises 13 5.1 Linear algebra . 13 5.2 Timing . 14 5.3 Stability functions of BDF-integrators . 14 5.4 3D plot . 15 5.5 Hilbert matrix . 15 5.6 Least square fit of a straight line . 16 5.7 Trapezoidal rule . 16 1 Basics 1.1 What is Octave? Octave is an interactive programming language specifically suited for vectoriz- able numerical calculations. -

Lecture 1: Introduction to UNIX
The Operating System Course Overview Getting Started Lecture 1: Introduction to UNIX CS2042 - UNIX Tools September 29, 2008 Lecture 1: UNIX Intro The Operating System Description and History Course Overview UNIX Flavors Getting Started Advantages and Disadvantages Lecture Outline 1 The Operating System Description and History UNIX Flavors Advantages and Disadvantages 2 Course Overview Class Specifics 3 Getting Started Login Information Lecture 1: UNIX Intro The Operating System Description and History Course Overview UNIX Flavors Getting Started Advantages and Disadvantages What is UNIX? One of the first widely-used operating systems Basis for many modern OSes Helped set the standard for multi-tasking, multi-user systems Strictly a teaching tool (in its original form) Lecture 1: UNIX Intro The Operating System Description and History Course Overview UNIX Flavors Getting Started Advantages and Disadvantages A Brief History of UNIX Origins The first version of UNIX was created in 1969 by a group of guys working for AT&T's Bell Labs. It was one of the first big projects written in the emerging C language. It gained popularity throughout the '70s and '80s, although non-AT&T versions eventually took the lion's share of the market. Predates Microsoft's DOS by 12 years! Lecture 1: UNIX Intro The Operating System Description and History Course Overview UNIX Flavors Getting Started Advantages and Disadvantages Lecture Outline 1 The Operating System Description and History UNIX Flavors Advantages and Disadvantages 2 Course Overview Class Specifics 3 -
I386-Engine™ Technical Manual
i386-Engine™ C/C++ Programmable, 32-bit Microprocessor Module Based on the Intel386EX Technical Manual 1950 5 th Street, Davis, CA 95616, USA Tel: 530-758-0180 Fax: 530-758-0181 Email: [email protected] http://www.tern.com Internet Email: [email protected] http://www.tern.com COPYRIGHT i386-Engine, VE232, A-Engine, A-Core, C-Engine, V25-Engine, MotionC, BirdBox, PowerDrive, SensorWatch, Pc-Co, LittleDrive, MemCard, ACTF, and NT-Kit are trademarks of TERN, Inc. Intel386EX and Intel386SX are trademarks of Intel Coporation. Borland C/C++ are trademarks of Borland International. Microsoft, MS-DOS, Windows, and Windows 95 are trademarks of Microsoft Corporation. IBM is a trademark of International Business Machines Corporation. Version 2.00 October 28, 2010 No part of this document may be copied or reproduced in any form or by any means without the prior written consent of TERN, Inc. © 1998-2010 1950 5 th Street, Davis, CA 95616, USA Tel: 530-758-0180 Fax: 530-758-0181 Email: [email protected] http://www.tern.com Important Notice TERN is developing complex, high technology integration systems. These systems are integrated with software and hardware that are not 100% defect free. TERN products are not designed, intended, authorized, or warranted to be suitable for use in life-support applications, devices, or systems, or in other critical applications. TERN and the Buyer agree that TERN will not be liable for incidental or consequential damages arising from the use of TERN products. It is the Buyer's responsibility to protect life and property against incidental failure. TERN reserves the right to make changes and improvements to its products without providing notice. -

Debian GNU/Linux Installation Guide Debian GNU/Linux Installation Guide Copyright © 2004 – 2015 the Debian Installer Team
Debian GNU/Linux Installation Guide Debian GNU/Linux Installation Guide Copyright © 2004 – 2015 the Debian Installer team This document contains installation instructions for the Debian GNU/Linux 8 system (codename “jessie”), for the 32-bit soft-float ARM (“armel”) architecture. It also contains pointers to more information and information on how to make the most of your new Debian system. Note: Although this installation guide for armel is mostly up-to-date, we plan to make some changes and reorganize parts of the manual after the official release of jessie. A newer version of this manual may be found on the Internet at the debian-installer home page (http://www.debian.org/devel/debian-installer/). You may also be able to find additional translations there. This manual is free software; you may redistribute it and/or modify it under the terms of the GNU General Public License. Please refer to the license in Appendix F. Table of Contents Installing Debian GNU/Linux 8 For armel......................................................................................ix 1. Welcome to Debian .........................................................................................................................1 1.1. What is Debian? ...................................................................................................................1 1.2. What is GNU/Linux? ...........................................................................................................2 1.3. What is Debian GNU/Linux?...............................................................................................3 -
X86 Memory Protection and Translation
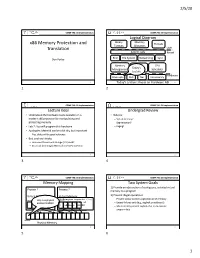
2/5/20 COMP 790: OS Implementation COMP 790: OS Implementation Logical Diagram Binary Memory x86 Memory Protection and Threads Formats Allocators Translation User System Calls Kernel Don Porter RCU File System Networking Sync Memory Device CPU Today’s Management Drivers Scheduler Lecture Hardware Interrupts Disk Net Consistency 1 Today’s Lecture: Focus on Hardware ABI 2 1 2 COMP 790: OS Implementation COMP 790: OS Implementation Lecture Goal Undergrad Review • Understand the hardware tools available on a • What is: modern x86 processor for manipulating and – Virtual memory? protecting memory – Segmentation? • Lab 2: You will program this hardware – Paging? • Apologies: Material can be a bit dry, but important – Plus, slides will be good reference • But, cool tech tricks: – How does thread-local storage (TLS) work? – An actual (and tough) Microsoft interview question 3 4 3 4 COMP 790: OS Implementation COMP 790: OS Implementation Memory Mapping Two System Goals 1) Provide an abstraction of contiguous, isolated virtual Process 1 Process 2 memory to a program Virtual Memory Virtual Memory 2) Prevent illegal operations // Program expects (*x) – Prevent access to other application or OS memory 0x1000 Only one physical 0x1000 address 0x1000!! // to always be at – Detect failures early (e.g., segfault on address 0) // address 0x1000 – More recently, prevent exploits that try to execute int *x = 0x1000; program data 0x1000 Physical Memory 5 6 5 6 1 2/5/20 COMP 790: OS Implementation COMP 790: OS Implementation Outline x86 Processor Modes • x86 -
Microprocessor Architecture
MICROPROCESSOR ARCHITECTURE UOP S.E.COMP (SEM-I) OPERATING IN REAL MODE Prof.P.C.Patil Department of Computer Engg Matoshri College of Engg.Nasik [email protected]. Introduction 2 Introduction . The 80386 microprocessor can operate basically in either Real Mode or Protected Mode. When 80386 is reset or powered up it is initialized in Real Mode. The 80386 maintains the compatibility of the object code with 8086 and 80286 running in real mode. In this mode, the 80386 supports same architecture as the 8086, but it can access the 32-bit register set of 80386DX. In real mode, it is also possible to use addressing modes with the 32-bit override instruction prefixes. 3 Real Mode Programming Model 4 Real Mode Programming Model . The programming model makes it easier to understand the microprocessor in a programming environment. The real mode programming model gives the programming environment for 80386DX in real mode. It shows only those parts of the microprocessor which the programmer can use such as various registers within the microprocessor. 5 6 Real Mode Programming Model . In the diagram, only the shaded portion is a part of real mode. It consists of eight 16-bit registers (IP, CS, DS, SS, ES, FS, GS and Flag register) and eight 32-bit registers (EAX, EBX, ECX, EDX, ESP, EBP, ESI, EDI). In Real mode 80386DX can access the Protection Enable (PE) bit from CR0 which is used to enter into the protected mode. 7 Real Mode Programming Model . 80386DX in real mode is a 8086 with extended registers and two additional data segment registers such as FS and GS. -
Virtual Memory in X86
Fall 2017 :: CSE 306 Virtual Memory in x86 Nima Honarmand Fall 2017 :: CSE 306 x86 Processor Modes • Real mode – walks and talks like a really old x86 chip • State at boot • 20-bit address space, direct physical memory access • 1 MB of usable memory • No paging • No user mode; processor has only one protection level • Protected mode – Standard 32-bit x86 mode • Combination of segmentation and paging • Privilege levels (separate user and kernel) • 32-bit virtual address • 32-bit physical address • 36-bit if Physical Address Extension (PAE) feature enabled Fall 2017 :: CSE 306 x86 Processor Modes • Long mode – 64-bit mode (aka amd64, x86_64, etc.) • Very similar to 32-bit mode (protected mode), but bigger address space • 48-bit virtual address space • 52-bit physical address space • Restricted segmentation use • Even more obscure modes we won’t discuss today xv6 uses protected mode w/o PAE (i.e., 32-bit virtual and physical addresses) Fall 2017 :: CSE 306 Virt. & Phys. Addr. Spaces in x86 Processor • Both RAM hand hardware devices (disk, Core NIC, etc.) connected to system bus • Mapped to different parts of the physical Virtual Addr address space by the BIOS MMU Data • You can talk to a device by performing Physical Addr read/write operations on its physical addresses Cache • Devices are free to interpret reads/writes in any way they want (driver knows) System Interconnect (Bus) : all addrs virtual DRAM Network … Disk (Memory) Card : all addrs physical Fall 2017 :: CSE 306 Virt-to-Phys Translation in x86 0xdeadbeef Segmentation 0x0eadbeef Paging 0x6eadbeef Virtual Address Linear Address Physical Address Protected/Long mode only • Segmentation cannot be disabled! • But can be made a no-op (a.k.a. -

Protected Mode - Wikipedia
2/12/2019 Protected mode - Wikipedia Protected mode In computing, protected mode, also called protected virtual address mode,[1] is an operational mode of x86- compatible central processing units (CPUs). It allows system software to use features such as virtual memory, paging and safe multi-tasking designed to increase an operating system's control over application software.[2][3] When a processor that supports x86 protected mode is powered on, it begins executing instructions in real mode, in order to maintain backward compatibility with earlier x86 processors.[4] Protected mode may only be entered after the system software sets up one descriptor table and enables the Protection Enable (PE) bit in the control register 0 (CR0).[5] Protected mode was first added to the x86 architecture in 1982,[6] with the release of Intel's 80286 (286) processor, and later extended with the release of the 80386 (386) in 1985.[7] Due to the enhancements added by protected mode, it has become widely adopted and has become the foundation for all subsequent enhancements to the x86 architecture,[8] although many of those enhancements, such as added instructions and new registers, also brought benefits to the real mode. Contents History The 286 The 386 386 additions to protected mode Entering and exiting protected mode Features Privilege levels Real mode application compatibility Virtual 8086 mode Segment addressing Protected mode 286 386 Structure of segment descriptor entry Paging Multitasking Operating systems See also References External links History https://en.wikipedia.org/wiki/Protected_mode -
Chapter 2 Powerpc Register Set
Chapter 2 PowerPC Register Set 20 20 This chapter describes the register organization defined by the three levels of the PowerPC U architecture—user instruction set architecture (UISA), virtual environment architecture V (VEA), and operating environment architecture (OEA). The PowerPC architecture defines O register-to-register operations for all computational instructions. Source data for these instructions are accessed from the on-chip registers or are provided as immediate values embedded in the opcode. The three-register instruction format allows specification of a target register distinct from the two source registers, thus preserving the original data for use by other instructions and reducing the number of instructions required for certain operations. Data is transferred between memory and registers with explicit load and store instructions only. Note that the handling of reserved bits in any register is implementation-dependent. Software is permitted to write any value to a reserved bit in a register. However, a subsequent reading of the reserved bit returns 0 if the value last written to the bit was 0 and returns an undefined value (may be 0 or 1) otherwise. This means that even if the last value written to a reserved bit was 1, reading that bit may return 0. 2.1 PowerPC UISA Register Set The PowerPC UISA registers, shown in Figure 2-1, can be accessed by either user- or U supervisor-level instructions (the architecture specification refers to user-level and supervisor-level as problem state and privileged state respectively). The general-purpose registers (GPRs) and floating-point registers (FPRs) are accessed as instruction operands. -

A Comparison of Protection Lookaside Buffers and the PA-RISC
rI3 HEWLETT ~~PACKARD A Comparison ofProtection Lookaside Buffers and the PA·RISC Protection Architecture John Wilkes, Bart Sears Computer Systems Laboratory HPL-92-55 March 1992 processor architecture, Eric Koldinger and others at the University of single address space, 64 Washington Department of Computer Science have bitaddressing, protection, proposed a new model for memory protection in PA-RISe, protection single-address-space architectures. This paper lookaside buffers, PLB, compares the Washington proposal with what translation lookaside already exists in PA-RISC, and suggests some buffers,TLB, cache incremental improvements to the latter that would indexing, virtually provide most of the benefits of the former. addressed caches Internal Accession Date Only © Copyright Hewlett-Packard Company 1992 1 Introduction A recent technical report by Eric Koldinger and others [Koldinger91] proposes a new model for managing protectioninformationinsingle address space processors. This paper is one outcome of discussions withthe authors about the real differences betweentheir proposal and the scheme usedinPA-RISC[Lee89,HPPA90]:it offers a restatement of the newproposal, a comparisonwith the existing PA-RISCarchitecture, and some thoughts onhow the PA-RISCarchitecture mightbe extended in the future to provide some of the benefits that the PLBidea was trying to achieve. The reader is assumed to be familiar withmodem TLB,cache and processor architectures; with luck, sufficient information is provided in this paper that detailed prior knowledge about either the Washington proposal or PA-RISCisn't required. Example To help illustrate some of the finer points of the different protectionmodels, anexample based on the LRPC work of Brian Bershad is used [Bershad90] (see Figure 1).