X86 Instruction Set 4.2 Why Learn Assembly
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fill Your Boots: Enhanced Embedded Bootloader Exploits Via Fault Injection and Binary Analysis
IACR Transactions on Cryptographic Hardware and Embedded Systems ISSN 2569-2925, Vol. 2021, No. 1, pp. 56–81. DOI:10.46586/tches.v2021.i1.56-81 Fill your Boots: Enhanced Embedded Bootloader Exploits via Fault Injection and Binary Analysis Jan Van den Herrewegen1, David Oswald1, Flavio D. Garcia1 and Qais Temeiza2 1 School of Computer Science, University of Birmingham, UK, {jxv572,d.f.oswald,f.garcia}@cs.bham.ac.uk 2 Independent Researcher, [email protected] Abstract. The bootloader of an embedded microcontroller is responsible for guarding the device’s internal (flash) memory, enforcing read/write protection mechanisms. Fault injection techniques such as voltage or clock glitching have been proven successful in bypassing such protection for specific microcontrollers, but this often requires expensive equipment and/or exhaustive search of the fault parameters. When multiple glitches are required (e.g., when countermeasures are in place) this search becomes of exponential complexity and thus infeasible. Another challenge which makes embedded bootloaders notoriously hard to analyse is their lack of debugging capabilities. This paper proposes a grey-box approach that leverages binary analysis and advanced software exploitation techniques combined with voltage glitching to develop a powerful attack methodology against embedded bootloaders. We showcase our techniques with three real-world microcontrollers as case studies: 1) we combine static and on-chip dynamic analysis to enable a Return-Oriented Programming exploit on the bootloader of the NXP LPC microcontrollers; 2) we leverage on-chip dynamic analysis on the bootloader of the popular STM8 microcontrollers to constrain the glitch parameter search, achieving the first fully-documented multi-glitch attack on a real-world target; 3) we apply symbolic execution to precisely aim voltage glitches at target instructions based on the execution path in the bootloader of the Renesas 78K0 automotive microcontroller. -

Copy on Write Based File Systems Performance Analysis and Implementation
Copy On Write Based File Systems Performance Analysis And Implementation Sakis Kasampalis Kongens Lyngby 2010 IMM-MSC-2010-63 Technical University of Denmark Department Of Informatics Building 321, DK-2800 Kongens Lyngby, Denmark Phone +45 45253351, Fax +45 45882673 [email protected] www.imm.dtu.dk Abstract In this work I am focusing on Copy On Write based file systems. Copy On Write is used on modern file systems for providing (1) metadata and data consistency using transactional semantics, (2) cheap and instant backups using snapshots and clones. This thesis is divided into two main parts. The first part focuses on the design and performance of Copy On Write based file systems. Recent efforts aiming at creating a Copy On Write based file system are ZFS, Btrfs, ext3cow, Hammer, and LLFS. My work focuses only on ZFS and Btrfs, since they support the most advanced features. The main goals of ZFS and Btrfs are to offer a scalable, fault tolerant, and easy to administrate file system. I evaluate the performance and scalability of ZFS and Btrfs. The evaluation includes studying their design and testing their performance and scalability against a set of recommended file system benchmarks. Most computers are already based on multi-core and multiple processor architec- tures. Because of that, the need for using concurrent programming models has increased. Transactions can be very helpful for supporting concurrent program- ming models, which ensure that system updates are consistent. Unfortunately, the majority of operating systems and file systems either do not support trans- actions at all, or they simply do not expose them to the users. -

Pdp11-40.Pdf
processor handbook digital equipment corporation Copyright© 1972, by Digital Equipment Corporation DEC, PDP, UNIBUS are registered trademarks of Digital Equipment Corporation. ii TABLE OF CONTENTS CHAPTER 1 INTRODUCTION 1·1 1.1 GENERAL ............................................. 1·1 1.2 GENERAL CHARACTERISTICS . 1·2 1.2.1 The UNIBUS ..... 1·2 1.2.2 Central Processor 1·3 1.2.3 Memories ........... 1·5 1.2.4 Floating Point ... 1·5 1.2.5 Memory Management .............................. .. 1·5 1.3 PERIPHERALS/OPTIONS ......................................... 1·5 1.3.1 1/0 Devices .......... .................................. 1·6 1.3.2 Storage Devices ...................................... .. 1·6 1.3.3 Bus Options .............................................. 1·6 1.4 SOFTWARE ..... .... ........................................... ............. 1·6 1.4.1 Paper Tape Software .......................................... 1·7 1.4.2 Disk Operating System Software ........................ 1·7 1.4.3 Higher Level Languages ................................... .. 1·7 1.5 NUMBER SYSTEMS ..................................... 1-7 CHAPTER 2 SYSTEM ARCHITECTURE. 2-1 2.1 SYSTEM DEFINITION .............. 2·1 2.2 UNIBUS ......................................... 2-1 2.2.1 Bidirectional Lines ...... 2-1 2.2.2 Master-Slave Relation .. 2-2 2.2.3 Interlocked Communication 2-2 2.3 CENTRAL PROCESSOR .......... 2-2 2.3.1 General Registers ... 2-3 2.3.2 Processor Status Word ....... 2-4 2.3.3 Stack Limit Register 2-5 2.4 EXTENDED INSTRUCTION SET & FLOATING POINT .. 2-5 2.5 CORE MEMORY . .... 2-6 2.6 AUTOMATIC PRIORITY INTERRUPTS .... 2-7 2.6.1 Using the Interrupts . 2-9 2.6.2 Interrupt Procedure 2-9 2.6.3 Interrupt Servicing ............ .. 2-10 2.7 PROCESSOR TRAPS ............ 2-10 2.7.1 Power Failure .............. -

The Linux Kernel Module Programming Guide
The Linux Kernel Module Programming Guide Peter Jay Salzman Michael Burian Ori Pomerantz Copyright © 2001 Peter Jay Salzman 2007−05−18 ver 2.6.4 The Linux Kernel Module Programming Guide is a free book; you may reproduce and/or modify it under the terms of the Open Software License, version 1.1. You can obtain a copy of this license at http://opensource.org/licenses/osl.php. This book is distributed in the hope it will be useful, but without any warranty, without even the implied warranty of merchantability or fitness for a particular purpose. The author encourages wide distribution of this book for personal or commercial use, provided the above copyright notice remains intact and the method adheres to the provisions of the Open Software License. In summary, you may copy and distribute this book free of charge or for a profit. No explicit permission is required from the author for reproduction of this book in any medium, physical or electronic. Derivative works and translations of this document must be placed under the Open Software License, and the original copyright notice must remain intact. If you have contributed new material to this book, you must make the material and source code available for your revisions. Please make revisions and updates available directly to the document maintainer, Peter Jay Salzman <[email protected]>. This will allow for the merging of updates and provide consistent revisions to the Linux community. If you publish or distribute this book commercially, donations, royalties, and/or printed copies are greatly appreciated by the author and the Linux Documentation Project (LDP). -

Mac Labs. More Creativity
Mac labs. More creativity. More engagement. More learning. Every Mac comes ready for 21st-century learning. Mac OS X Server creates the ultimate lab environment. Creativity and innovation are critical skills in the modern Mac OS X Server includes simplified tools for creating wikis and workplace, which makes them critical skills to teach today’s blogs, so students and staff can set up and manage them with students. Apple offers comprehensive lab solutions for your little or no help from IT. The Spotlight Server feature makes it school or university that will creatively engage students and easy for students collaborating on projects to find and view motivate them to take an interest in their own learning. The content stored anywhere on the network. Of course, access iLife ’09 suite of applications comes standard on every Mac, controls are built in, so they only get the search results they’re so students can immediately begin creating podcasts, editing authorised to see. Mac OS X Server also allows for real-time videos, composing music, producing photo essays and more. streaming of audio and video content, which lets everyone get right to work instead of waiting for downloads – saving major Mac or PC? Have both. storage across your network. Now one lab really can solve all your computing needs. Every Mac is powered by an Intel processor and features Launch careers from your Mac lab. Mac OS X – the world’s most advanced operating system. As an Apple Authorised Training Centre for Education, your Mac OS X comes with an amazing dual-boot feature called school can build a bridge between students and real-world Boot Camp that lets students run Windows XP or Vista natively careers. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -

ARM Instruction Set
4 ARM Instruction Set This chapter describes the ARM instruction set. 4.1 Instruction Set Summary 4-2 4.2 The Condition Field 4-5 4.3 Branch and Exchange (BX) 4-6 4.4 Branch and Branch with Link (B, BL) 4-8 4.5 Data Processing 4-10 4.6 PSR Transfer (MRS, MSR) 4-17 4.7 Multiply and Multiply-Accumulate (MUL, MLA) 4-22 4.8 Multiply Long and Multiply-Accumulate Long (MULL,MLAL) 4-24 4.9 Single Data Transfer (LDR, STR) 4-26 4.10 Halfword and Signed Data Transfer 4-32 4.11 Block Data Transfer (LDM, STM) 4-37 4.12 Single Data Swap (SWP) 4-43 4.13 Software Interrupt (SWI) 4-45 4.14 Coprocessor Data Operations (CDP) 4-47 4.15 Coprocessor Data Transfers (LDC, STC) 4-49 4.16 Coprocessor Register Transfers (MRC, MCR) 4-53 4.17 Undefined Instruction 4-55 4.18 Instruction Set Examples 4-56 ARM7TDMI-S Data Sheet 4-1 ARM DDI 0084D Final - Open Access ARM Instruction Set 4.1 Instruction Set Summary 4.1.1 Format summary The ARM instruction set formats are shown below. 3 3 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 9876543210 1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0 Cond 0 0 I Opcode S Rn Rd Operand 2 Data Processing / PSR Transfer Cond 0 0 0 0 0 0 A S Rd Rn Rs 1 0 0 1 Rm Multiply Cond 0 0 0 0 1 U A S RdHi RdLo Rn 1 0 0 1 Rm Multiply Long Cond 0 0 0 1 0 B 0 0 Rn Rd 0 0 0 0 1 0 0 1 Rm Single Data Swap Cond 0 0 0 1 0 0 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 Rn Branch and Exchange Cond 0 0 0 P U 0 W L Rn Rd 0 0 0 0 1 S H 1 Rm Halfword Data Transfer: register offset Cond 0 0 0 P U 1 W L Rn Rd Offset 1 S H 1 Offset Halfword Data Transfer: immediate offset Cond 0 -
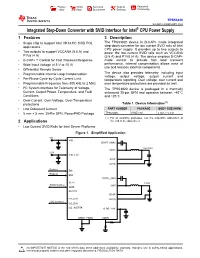
Integrated Step-Down Converter with SVID Interface for Intel® CPU
Product Order Technical Tools & Support & Folder Now Documents Software Community TPS53820 SLUSE33 –FEBRUARY 2020 Integrated Step-Down Converter with SVID Interface for Intel® CPU Power Supply 1 Features 3 Description The TPS53820 device is D-CAP+ mode integrated 1• Single chip to support Intel VR13.HC SVID POL applications step-down converter for low current SVID rails of Intel CPU power supply. It provides up to two outputs to • Two outputs to support VCCANA (5.5 A) and power the low current SVID rails such as VCCANA P1V8 (4 A) (5.5 A) and P1V8 (4 A). The device employs D-CAP+ • D-CAP+™ Control for Fast Transient Response mode control to provide fast load transient • Wide Input Voltage (4.5 V to 15 V) performance. Internal compensation allows ease of use and reduces external components. • Differential Remote Sense • Programmable Internal Loop Compensation The device also provides telemetry, including input voltage, output voltage, output current and • Per-Phase Cycle-by-Cycle Current Limit temperature reporting. Over voltage, over current and • Programmable Frequency from 800 kHz to 2 MHz over temperature protections are provided as well. 2 • I C System Interface for Telemetry of Voltage, The TPS53820 device is packaged in a thermally Current, Output Power, Temperature, and Fault enhanced 35-pin QFN and operates between –40°C Conditions and 125°C. • Over-Current, Over-Voltage, Over-Temperature (1) protections Table 1. Device Information • Low Quiescent Current PART NUMBER PACKAGE BODY SIZE (NOM) • 5 mm × 5 mm, 35-Pin QFN, PowerPAD Package TPS53820 RWZ (35) 5 mm × 5 mm (1) For all available packages, see the orderable addendum at 2 Applications the end of the data sheet. -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -

The Von Neumann Computer Model 5/30/17, 10:03 PM
The von Neumann Computer Model 5/30/17, 10:03 PM CIS-77 Home http://www.c-jump.com/CIS77/CIS77syllabus.htm The von Neumann Computer Model 1. The von Neumann Computer Model 2. Components of the Von Neumann Model 3. Communication Between Memory and Processing Unit 4. CPU data-path 5. Memory Operations 6. Understanding the MAR and the MDR 7. Understanding the MAR and the MDR, Cont. 8. ALU, the Processing Unit 9. ALU and the Word Length 10. Control Unit 11. Control Unit, Cont. 12. Input/Output 13. Input/Output Ports 14. Input/Output Address Space 15. Console Input/Output in Protected Memory Mode 16. Instruction Processing 17. Instruction Components 18. Why Learn Intel x86 ISA ? 19. Design of the x86 CPU Instruction Set 20. CPU Instruction Set 21. History of IBM PC 22. Early x86 Processor Family 23. 8086 and 8088 CPU 24. 80186 CPU 25. 80286 CPU 26. 80386 CPU 27. 80386 CPU, Cont. 28. 80486 CPU 29. Pentium (Intel 80586) 30. Pentium Pro 31. Pentium II 32. Itanium processor 1. The von Neumann Computer Model Von Neumann computer systems contain three main building blocks: The following block diagram shows major relationship between CPU components: the central processing unit (CPU), memory, and input/output devices (I/O). These three components are connected together using the system bus. The most prominent items within the CPU are the registers: they can be manipulated directly by a computer program. http://www.c-jump.com/CIS77/CPU/VonNeumann/lecture.html Page 1 of 15 IPR2017-01532 FanDuel, et al. -

Introduction to Intel® FPGA IP Cores
Introduction to Intel® FPGA IP Cores Updated for Intel® Quartus® Prime Design Suite: 20.3 Subscribe UG-01056 | 2020.11.09 Send Feedback Latest document on the web: PDF | HTML Contents Contents 1. Introduction to Intel® FPGA IP Cores..............................................................................3 1.1. IP Catalog and Parameter Editor.............................................................................. 4 1.1.1. The Parameter Editor................................................................................. 5 1.2. Installing and Licensing Intel FPGA IP Cores.............................................................. 5 1.2.1. Intel FPGA IP Evaluation Mode.....................................................................6 1.2.2. Checking the IP License Status.................................................................... 8 1.2.3. Intel FPGA IP Versioning............................................................................. 9 1.2.4. Adding IP to IP Catalog...............................................................................9 1.3. Best Practices for Intel FPGA IP..............................................................................10 1.4. IP General Settings.............................................................................................. 11 1.5. Generating IP Cores (Intel Quartus Prime Pro Edition)...............................................12 1.5.1. IP Core Generation Output (Intel Quartus Prime Pro Edition)..........................13 1.5.2. Scripting IP Core Generation....................................................................