Autonomic Functions Implemented in Existing ITS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Adopted Text
THIS PAGE INTENTIONALLY LEFT BLANK Amendment No. 2017-28 Adopted November 17, 2020 AMENDMENT TO THE COMPREHENSIVE PLAN (2017 EDITION) The following changes to the Comprehensive Plan have adopted by the Board of Supervisors. To identify changes from the previously adopted Plan, new text is shown with underline and deleted text shown with strikethrough. MODIFY: Fairfax County Comprehensive Plan, 2017 Edition, Area III, Fairfax Center Area, as amended through 7-31-2018, Fairfax Center Area-Wide Recommendations, page 8, to delete strikethrough text: “The core area near the first Metrorail station is planned for a mix of uses at a variety of intensities, some of which are tied to the funding of the Metrorail extension, or in the interim, funding of a Bus Rapid Transit System. Any development or redevelopment occurring prior to the funding of the Metrorail extension should not preclude higher-intensity transit-oriented development that is envisioned in the future. …” MODIFY: Fairfax County Comprehensive Plan, 2017 Edition, Area III, Fairfax Center Area, Amended through 7-31-2018, Land Use Plan Recommendations – Suburban Center Core Area, Land Unit A, Land Use Recommendations, page 37: “Sub-unit A1 Baseline: Mixed use up to .15 FAR Overlay: Mixed use up to .65 FAR; 1.0 FAR Sub-unit A1 consists of approximately 133 acres, including a 109.5-acre portion that and contains the Fair Oaks regional mall Regional Mall at its center (“Mall Property” or “Mall”), as shown on Figure 11. and several Several office buildings, and hotels, and other commercial uses around its the perimeter of the Mall Property occupy the approximately 24-acre remainder of the sub-unit. -

Phase II Highway Corridor Strategy Descriptions Technical
ENTRAL ORK OUNTY ONNECTIONS TUDY CENTRAL YORK COUNTY CONNECTIONS STUDY PHASE II HIGHWAY CORRIDOR STRATEGY DESCRIPTIONS PHASE II TECHNICAL MEMORANDUM SEPTEMBER 2011 Prepared for: Maine Department Maine Turnpike Authority of Transportation Prepared by: In association with: Morris Communications • Kevin Hooper Associates T.Y. Lin • Planning Decisions • Facet Decision Systems Dr. Charles Colgan, University of Southern Maine • Evan Richert Normandeau Associates • Preservation Company This document is formatted for two-sided printing. Document II-4 ENTRAL ORK OUNTY ONNECTIONS TUDY CENTRAL YORK COUNTY CONNECTIONS STUDY 1 INTRODUCTION This document summarizes the potential highway corridor improvements – called strategies – that are being tested and evaluated for Phase II of the Central York County Connections Study (CYCCS). Phase II Highway Strategies are a starting point in the development and consideration of candidate improvements for the study; they are not recommendations, nor are they the only strategies that will be studied. Phase II strategies are conceptual in nature, and not yet detailed, specific proposals. Strategies considered later in the study during Phase III, as well as those ultimately recommended by the study, may differ considerably from the initial strategies currently under evaluation in Phase II. Specific aspects of these initially proposed strategies may be dropped, carried forward or combined in different ways, depending on the results of the analyses conducted during Phase II. The study is guided by a Purpose and Need Statement, which articulates that the study is to identify transportation and related land use strategies that enhance economic development opportunities and preserve and improve the regional transportation system. Additional information on the study, including the full Purpose and Need Statement, is available at the project website: www.connectingyorkcounty.org. -
Outline Business Case
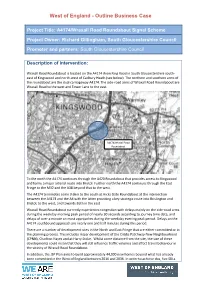
West of England - Outline Business Case Project Title: A4174/Wraxall Road Roundabout Signal Scheme Project Owner: Richard Gillingham, South Gloucestershire Council Promoter and partners: South Gloucestershire Council Description of Intervention: Wraxall Road Roundabout is located on the A4174 Avon Ring Road in South Gloucestershire south- east of Kingswood and north-west of Cadbury Heath (see below). The northern and southern arms of the roundabout are the dual carriageway A4174. The side-road arms of Wraxall Road Roundabout are Wraxall Road to the west and Tower Lane to the east. A4174/Wraxall Road Roundabout To the north the A4174 continues through the A420 Roundabout that provides access to Kingswood and forms a major arterial route into Bristol. Further north the A4174 continues through the East Fringe to the M32 and the A38 beyond that to the west. The A4174 terminates some 3.6km to the south at Hicks Gate Roundabout at the intersection between the A4174 and the A4 with the latter providing a key strategic route into Brislington and Bristol, to the west, and towards Bath in the east. Wraxall Road Roundabout currently experiences congestion with delays mainly on the side-road arms during the weekday morning peak period of nearly 30 seconds according to journey time data, and delays of over a minute on most approaches during the weekday evening peak period. Delays on the A4174 southbound approach are nearly one and half minutes during this period. There are a number of development sites in the North and East Fringe that are either committed or in the planning process. -
A6120 Outer Ring Road Improvements Roundhay Park Lane
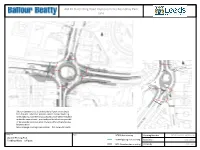
A6120 Outer Ring Road Improvements Roundhay Park Lane Sub-carriageway ducts to be installed off-peak under single lane closures. Wherever possible, where multiple ducts e.g.. Street lighting and UTMC cross adjacent these will be installed under the same closure , in a combined trench where possible or by separate resources when there is sufficient safe ty zone between them. Main drainage crossings also installed – Not shown for clarity Drawing Title Notes UTMC duct crossing Drawing Number E17015/SK/PH-1B/1 Rev 0 Outline Phasing Plan Enabling Works – Off peak Street lighting duct crossing Issue Date 01/10/2018 NPG Diversion duct crossing Drawn By Rob Evans A6120 Outer Ring Road Improvements Roundhay Park Lane Pedestrian route to be maintained Pedestrian route to be maintained by constructing verge half and half. by constructing verge half and half. Pedestrian route diverted into Pedestrian route diverted into carriageway within TM off-peak carriageway within TM off-peak when works dictate access is when works dictate access is required to full width of verge. required to full width of verge. Pedestrian routes to be maintained on existing footway which is to be re-surfaced only. Pedestrian route to be moved on to carriageway within TM off-peak to facilitate surfacing operations. Drawing Title Key Under Construction TM Limit Drawing Number E17015/SK/PH-1B/2 Rev 0 Outline Phasing Plan Stage 1 – – Peak Time Arrangement Completed Traffic Movement Issue Date 01/10/2018 Temporary Surfacing Pedestrian Route Drawn By Rob Evans A6120 Outer Ring Road Improvements Roundhay Park Lane Pedestrian route to be maintained Pedestrian route to be maintained by constructing verge half and half. -

Roadway &Traffic Operations Strategy
ESTABLISHING MULTI-MODAL STRATEGIES | CHAPTER 4 ROADWAY & TRAFFIC OPERATIONS STRATEGY To serve planned growth, the future transportation system needs multi-modal improvements and strategies to manage the forecasted travel demand. This chapter presents a detailed strategy to improve Moscow’s roadway network and traffic operations over the next 20 years, including network connectivity options, regional circulation enhancements, intersection modifications, and multi-modal street design guidelines. MULTI-MODAL TRANSPORTATION PLAN This page intentionally left blank. Moscow on the Move 4 ROADWAY & TRAFFIC OPERATIONS STRATEGY Supporting the guiding principles of Moscow on the Move, the Roadway & This Transportation Traffic Operations Strategy strives to provide a truly multi-modal Commission “check mark” icon signifies transportation system and improve safety, access, and mobility for all street which actions have unanimous users by identifying strategies, policies, and projects that help achieve support from the Commission. Moscow’s vision for mobility and access. This strategy of Moscow on the Move The icon is a way to illustrate the level of support for identifies opportunities to retrofit existing streets in Moscow and develops the implementation. street grid to improve citywide connectivity for motor vehicles, pedestrians, bicyclists, and transit users. This strategy specifically provides an overview of the existing traffic conditions and how conditions might change by 2035, a street network plan, various design tools that could be applied throughout the city, and descriptions of recommended street projects. FUTURE DEFICIENCIES AND NEEDS Existing and future roadway and traffic operation conditions were assessed to determine the needs and deficiencies of the system. The key areas projected to require improvement or to present future challenges are summarized below. -
Study for the Ring Roads
Intelligent Transportation Systems Study for the Edmonton and Calgary Ring Roads Terms of Reference Highway Policy and Planning Branch 3rd Floor, 4999-98 Avenue Edmonton, AB T6B 2X3 March 1, 2004 Background Alberta Transportation has developed a strategic vision for implementing Intelligent Transportation Systems (ITS) to improve the safety, capacity, and efficiency of the provincial transportation system. The ITS Strategic Plan, dated September 2000, provides a vision for the future of ITS in Alberta’s provincial highway system and outlines strategies for Alberta Transportation to develop and deploy these technologies. The ring roads in the cities of Edmonton and Calgary are top priority projects in Alberta, and they are integral components of the Trans-Canada Highway and the Trans-Canada Highway Yellowhead Route through the province. Deployment of ITS technologies will further enhance the safe and efficient operation of the ring roads in the two cities. Edmonton Ring Road – Anthony Henday Drive A major part of the Edmonton ring road, also known as Anthony Henday Drive (AHD), is located inside the city limits of Edmonton. By agreement with the City, Alberta Transportation is responsible for funding and developing AHD. AHD is part of Alberta Transportation’s initiative to provide a high standard highway trade corridor linking Alberta to the United States and Mexico. In addition, the roadway forms an important part of Edmonton’s overall transportation system and is included in the City’s Transportation Master Plan, which addresses future transportation needs to the year 2020. Growth in the Edmonton metropolitan area will reach a population of 1.17 million by 2020 with significant traffic growth at the same time. -

PR Colas Canada
PRESS RELEASE Boulogne, May 29, 2017 Two Colas Canada companies secure 300 million CAD in contracts for the construction and maintenance of the Southwest Calgary Ring Road in Alberta The Southwest Calgary Ring Road (SWCRR) Project, a PPP awarded to Mountain View Partners (MVP) 1, involves the construction and maintenance of 31 km of 6- to 8-lane highway, 14 interchanges, 47 bridges and a tunnel. Alberta Highway Services Ltd (AHSL), a Colas Canada company and subconsultant to the MVP consortium, has secured the maintenance contract for the section under construction. The contract, which will run up to 2051, amounts to 204 million Canadian dollars². AHSL is renowned for its expertise, boasting 22 years of experience on a number of maintenance and winter maintenance contracts involving roads and highways throughout the province of Alberta. Standard General Calgary, another Colas Canada company that has been a leader in road construction in the city of Calgary for more than 75 years, was contracted by the Design and Build Consortium of KGL Constructors 1 to manufacture and apply all the asphalt concrete required by the project, i.e., some one million tons, for a total of 95 million Canadian dollars. The work has started, with completion scheduled for October 2021. ¹ Mountain View Partners is a consortium comprising: Kiewit Mountain View Partners Investors Inc., Meridiam Infrastructure Mountain View ULC, CC&L MVP Holdings Ltd, LMVP Limited Partnership. KGL Constructors is a consortium comprising: Kiewit Management Co., Graham Infrastructure LP, Ledcor CMI Ltd. Operations Period Maintenance performed by: Alberta Highway Services Ltd., a Colas Canada Inc. -

Traffic Impact and Access Study, Sherwood Plaza South (SPS) – Phased Master Plan Redevelopment, Natick, Massachusetts; VHB; April 2014
TRANSPORTATION IMPACT ASSESSMENT PROPOSED CHICK-FIL-A RESTAURANT FRAMINGHAM, MASSACHUSETTS Prepared for: Atlanta, Georgia December 2014 Prepared by: VANASSE & ASSOCIATES, INC. 35 New England Business Center Drive Suite 140 Andover, MA 01810 (978) 474-8800 www.rdva.com Copyright © 2014 by VAI All Rights Reserved CONTENTS EXECUTIVE SUMMARY .............................................................................................................. 1 Existing Conditions ............................................................................................................. 1 Future Conditions ................................................................................................................ 3 Traffic Operations Analysis ................................................................................................ 6 Parking Demand Analysis ................................................................................................... 6 Drive-Through Window Vehicle Queue Analysis .............................................................. 7 Sight Distance Evaluation ................................................................................................... 8 Recommendations ............................................................................................................... 8 INTRODUCTION .......................................................................................................................... 10 Project Description ........................................................................................................... -

Staten Island Bus Service
Staten Island Bus Service Color matches bus route on map. For Additional Information More detailed service information, timetables and schedules are available Bus Route Number S59 Richmond Avenue Major Street(s) of Operation on the web at mta.info. Or call 511 and Operates between Main St/Amboy Rd and Richmond Terrace/Park Av dur- or Origin/Destination say Subways and Buses”. Timetables Description of Route ing weekdays. Evenings and weekends, S59 buses run between Hylan Blvd/ and schedules are also displayed at most Richmond Av and Richmond Terrace/Park Av. bus stops. Note: traffic and other Operates between Main St/Amboy Rd and Richmond Terrace/Park Av, conditions can affect scheduled arrivals Service Variation and departures. weekdays: Direction of Travel IF YOU SEE AVG. FREQUENCY (MINS.) TOWARD MAIN ST TOWARD RICHMOND TERR AM NOON PM EVE NITE Hours of Operation 5:00AM – 9:10AM 6:15AM – 9:40AM WEEKDAYS: 15 – 15 – – Frequency of Service In this case, the first bus of the weekday service, 1:10PM – 6:45PM 1:55PM – 7:37PM Scheduled time between buses, traveling toward Main Street, leaves in minutes. Richmond Terrace/Park Avenue at 5:00 a.m. SOMETHING, Operates between Hylan Blvd/Richmond Av and Richmond Terrace/Park Av, The last bus of the weekday Morning Rush service daily: AM = Morning rush (7:00 a.m.–9:00 a.m.) leaves Richmond Terrace/Park Avenue at 9:10 a.m. AVG. FREQUENCY (MINS.) TOWARD HYLAN BLVD TOWARD RICHMOND TERR AM NOON PM EVE NITE NOON = Midday (11:00 a.m.–1:00 p.m.) WEEKDAYS: 4:15AM – 1:25AM 4:35AM – 1:00AM 15 20 15 20 – PM = Afternoon rush (4:00 p.m.–7:00 p.m.) Primary Service SATURDAYS: 5:00AM– 1:30AM 4:45AM – 12:45AM 17 20 20 20 – SAY EVE = Evening (7:00 p.m.–9:00 p.m.) “Daily” indicates service 7 days a week. -

5.3 FUTURE ROAD SYSTEM PLANNING 5.3.1 Issues
CREATS Phase I Final Report Vol. III: Transport Master Plan Chapter 5: URBAN ROAD SYSTEM 5.3 FUTURE ROAD SYSTEM PLANNING 5.3.1 Issues (1) Regional Highway Network The Completion and Extension of the Ring Road Network At the end of July 2002, the Ring Road is basically complete except for the closing of the ring in southwest Giza. It has been a major struggle for the MHUUC how to close the Ring Road since its early days of construction. The alignment of the Ring Road in the southwest link shows that it has been critically difficult to close the link at the Haram area. The MHUUC was planning to extend the Ring Road from Interchange IC22 (see Figure 5.3.1) to the 6th of October Road, however, it was finally cancelled due to the international pressure for protecting the cultural heritage preservation area. The Ministry is now planning to extend the road from IC01 to the 6th of October Road by the plan shown in Figure 5.3.1. It also has a branch link to westward to bypass the traffic from the Ring Road (IC01) to Alexandria Desert Road. Source: JICA Study Team based on the information from GOPP Figure 5.3.1 The Ring Road Extension Plans One of the major functions of the Ring Road, to facilitate the connection to the 6th of October City with the existing urban area, can be achieved with this extension. However, unclosed Ring Road will still remain a problem in the network since 5 - 21 CREATS Phase I Final Report Vol. -

Ring Road Development Problems in Metropolitan Cities of Indonesia
MATEC Web of Conferences 331, 07001 (2020) https://doi.org/10.1051/matecconf/202033107001 ICUDR 2019 Ring Road Development Problems in Metropolitan Cities of Indonesia Agus Dharma Tohjiwa1*, 1Department of Architecture, Gunadarma University, Depok, Indonesia. Abstract. The development of ring roads in Indonesia are not only as a means of transportation needs but also as a means for the urban regional development. Although it produces many economic benefits, this development produces many new problems, especially in metropolitan cities. The aim of this research is to formulate and describe the problems of ring road development in the metropolitan cities of Indonesia. The data collection was carried out through a survey and interview with related institutions in 7 cities, they are Medan, Palembang, Bandar Lampung, Surabaya, Makassar, Manado, and Jakarta. The result of this research shows that there are 23 problems found there. The most common problem found are the uncontrolled housing development (urban sprawl) and public transportation (occurs in 6 cities). The second most problems found are regional connectivity, ring road intersection, housing access, settlement facilities, and social problems (occurs in 5 cities). All the existing problems can be classified into 6 problem types, they are (1) problem of ring road preparation and construction, (2) problem of disobedience and inconsistency of regulation, (3) problem of spatial planning and urban development, (4) problem of housing growth and facilities provision, (5) problem of coordination among institution and regulatory synchronization, and (6) problem of environmental management related to the integration of ring road and settlement development. 1 Introduction The high level of population in urban areas that are caused by both natural growth and urbanization impacts on the demand for infrastructures and settlements. -

Chapter VI: Streets, Roads, and Highways C
MASTER PLAN B. Identify future locations for rights-of-way for highway facilities COUNTYWIDE so that these can be protected from future development. Transportation Chapter VI: Streets, Roads, and Highways C. Include recommendations for development of access controls that are appropriate to the functional classification of the highway. The highway system is classified into various categories, delineated according to the geometric, right-of-way, and service characteristics. Introduction Highway classification by function is useful for planning and design It is of critical importance that the roads, streets, and highways be purposes, and is delineated as follows: maintained and preserved as a segment of the transportation A. Freeway: A divided highway for through traffic with full control infrastructure for Prince George’s County, in order to supplement and of access and grade-separated interchanges at selected public support the transit and nonmotorized elements into the future. For the roads. county to grow in population and jobs without a corresponding increase in traffic congestion, the road infrastructure will need B. Expressway: A divided highway for through traffic with full or improvements that eliminate any gaps that may impede the transit partial control of access and interchanges at selected public roads network and accommodate nonmotorized travel along it. with some at-grade intersections at 1,500–2,000 foot intervals. In addition to maintaining and enhancing the transportation C. Arterial: A highway for through and local traffic, either divided infrastructure, transportation demand management (TDM) strategies, or undivided, with controlled access to abutting properties and such as construction of park-and-ride lots and making transit and at-grade intersections.