A Global Shape Model for Saturn's Moon Enceladus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

High-Resolution Enceladus Atlas Derived from Cassini-ISS Images
ARTICLE IN PRESS Planetary and Space Science 56 (2008) 109–116 www.elsevier.com/locate/pss High-resolution Enceladus atlas derived from Cassini-ISS images Th. Roatscha,Ã,M.Wa¨hlischa, B. Giesea, A. Hoffmeistera, K.-D. Matza, F. Scholtena, A. Kuhna, R. Wagnera, G. Neukumb, P. Helfensteinc, C. Porcod aInstitute of Planetary Research, German Aerospace Center (DLR), Berlin, Germany bRemote Sensing of the Earth and Planets, Freie Universita¨t Berlin, Berlin, Germany cDepartment of Astronomy, Cornell University, Ithaca, NY, USA dCICLOPS/Space Science Institute, Boulder, CO, USA Received 3 January 2006; received in revised form 21 February 2007; accepted 21 March 2007 Available online 14 September 2007 Abstract The Cassini Imaging Science Subsystem (ISS) acquired 377 high-resolution images (o1 km/pixel) during three close flybys of Enceladus in 2005 [Porco, C.C., et al., 2006. Cassini observes the active south pole of Enceladus. Science 311, 1393–1401.]. We combined these images with lower resolution Cassini images and four others taken by Voyager cameras to produce a high-resolution global controlled mosaic of Enceladus. This global mosaic is the baseline for a high-resolution Enceladus atlas that consists of 15 tiles mapped at a scale of 1:500,000. The nomenclature used in this atlas was proposed by the Cassini imaging team and was approved by the International Astronomical Union (IAU). The whole atlas is available to the public through the Imaging Team’s website (http:// ciclops.org/maps). r 2007 Elsevier Ltd. All rights reserved. Keywords: Cassini; Icy satellites; Planetary mapping; Saturnian system 1. Introduction extended mission begins. -

PDF Facsimile Vol. 2
This is a reproduction of a library book that was digitized by Google as part of an ongoing effort to preserve the information in books and make it universally accessible. http://books.google.com PersonalnarrativeofapilgrimagetoEl-MedinahandMeccah RichardFrancisBurton W/. <J\ From the library of Lloyd Cabot Ttriggs 1909 - 1975 Tozzer Library PEABODY MUSEUM HARVARD UNIVERSITY f. THE PILGRIM. PERSONAL NARRATIVE PILGKIMAGE TO EL-MEDINAH AND MECCAH. BY RICHARD F, BURTON, LIEUTENANT BOMBAY ARHY. " Om aotlons of Mecca must be (lrnwn from the Arabluis -, u no unbclierer is permitted to enter the city, our traveller* are eilent." — Gibbon, chap. 50. IN THREE VOLUMES. VOL. II. — EL-MEDINAH. LONDON: LONGMAN, BROWN, GREEN, AND LONGMANS. 18H5. '/•'.< Author r«ftn«4 to hitnsetfttic right o/aufAorumff a TransIatfon ofthiM Work.] Bool. R-m>^'*fsV •• RECEIVED QTO 1 r ^f( _PEABODY "MUSEUM XiONDON I A. tuid G. A. SromswooDE, New. street-Squure. ^J \ CONTENTS OF THE SECOND VOLUME. CHAPTER XIV. PAGE From Bir Abbas to El Mcdinah - - - 1 CHAPTER XV. Through the Suburb of El Medinah to Hamid's House - - - - - 28 CHAPTER XVI. A Visit to the Prophet's Tomb - . - 56 CHAPTER XVII. An Essay towards the History of the Prophet's Mosque - - - - 113 CHAPTER XVIII. El Medinah 162 CHAPTER XIX. A Ride to the Mosque of Kuba - - - 195 CHAPTER XX. The Visitation of Hamzah's Tomb - - 223 CHAPTER XXI. The People of El Medinah - - - 254 IV CONTENTS. CHAPTER XXII. FACE A Visit to the Saints' Cemetery - - - 295 POSTSCRIPT - 329 APPENDIX I. Specimen of a Murshid's Diploma, in the Kadiri Oriler of the Mystic Craft El Tasawwuf - - - 341 APPENDIX II. -

The Role of Social Agents in the Translation Into English of the Novels of Naguib Mahfouz
Some pages of this thesis may have been removed for copyright restrictions. If you have discovered material in AURA which is unlawful e.g. breaches copyright, (either yours or that of a third party) or any other law, including but not limited to those relating to patent, trademark, confidentiality, data protection, obscenity, defamation, libel, then please read our Takedown Policy and contact the service immediately The Role of Social Agents in the Translation into English of the Novels of Naguib Mahfouz Vol. 1/2 Linda Ahed Alkhawaja Doctor of Philosophy ASTON UNIVERSITY April, 2014 ©Linda Ahed Alkhawaja, 2014 This copy of the thesis has been supplied on condition that anyone who consults it is understood to recognise that its copyright rests with its author and that no quotation from the thesis and no information derived from it may be published without proper acknowledgement. Thesis Summary Aston University The Role of Social Agents in the Translation into English of the Novels of Naguib Mahfouz Linda Ahed Alkhawaja Doctor of Philosophy (by Research) April, 2014 This research investigates the field of translation in an Egyptain context around the work of the Egyptian writer and Nobel Laureate Naguib Mahfouz by adopting Pierre Bourdieu’s sociological framework. Bourdieu’s framework is used to examine the relationship between the field of cultural production and its social agents. The thesis includes investigation in two areas: first, the role of social agents in structuring and restructuring the field of translation, taking Mahfouz’s works as a case study; their role in the production and reception of translations and their practices in the field; and second, the way the field, with its political and socio-cultural factors, has influenced translators’ behaviour and structured their practices. -

Why They Died Civilian Casualties in Lebanon During the 2006 War
September 2007 Volume 19, No. 5(E) Why They Died Civilian Casualties in Lebanon during the 2006 War Map: Administrative Divisions of Lebanon .............................................................................1 Map: Southern Lebanon ....................................................................................................... 2 Map: Northern Lebanon ........................................................................................................ 3 I. Executive Summary ........................................................................................................... 4 Israeli Policies Contributing to the Civilian Death Toll ....................................................... 6 Hezbollah Conduct During the War .................................................................................. 14 Summary of Methodology and Errors Corrected ............................................................... 17 II. Recommendations........................................................................................................ 20 III. Methodology................................................................................................................ 23 IV. Legal Standards Applicable to the Conflict......................................................................31 A. Applicable International Law ....................................................................................... 31 B. Protections for Civilians and Civilian Objects ...............................................................33 -
Hi-Resolution Map Sheet
Controlled Mosaic of Enceladus Salih Se 400K 0/36 CMN, 2018 GENERAL NOTES This map sheet is the 6th of a 15-quadrangle series covering the entire surface of Enceladus at a nominal scale of 1: 400 000. This map series is the third version of the Enceladus atlas and supersedes the release from 20101. The source of map data was the Cassini imaging experiment (Porco et al., 2004)2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian system. The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings and moons from orbit; it entered Saturnian orbit on July 1st, 2004. 72° West 60° 50° 40° 30° 20° 10° 0° West The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem 22° 22° (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 20° 20° to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector consisting of a 1024 square array of pixels, each 12 microns on a side. MAP SHEET DESIGNATION Se Enceladus (Saturnian satellite) 400K Scale 1 : 400 000 Bahman 0/36 Center point in degrees consisting of latitude/west longitude CMN Controlled Mosaic with Nomenclature 2018 Year of publication IMAGE PROCESSING3 - Radiometric correction of the images - Creation of a dense tie point network - Multiple least-square bundle adjustments - Ortho-image mosaicking A 10° S 10° S CONTROL O F For the Cassini mission, spacecraft position and camera pointing data are available in the form of R SPICE kernels. -

Mcleods0809.Pdf (15.34Mb)
ISOSTATICALLY COMPENSATED EXTENSIONAL TECTONICS ON ENCELADUS by Scott Stuart McLeod A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Earth Sciences MONTANA STATE UNIVERSITY Bozeman, Montana May 2009 ©COPYRIGHT by Scott Stuart McLeod 2009 All Rights Reserved ii APPROVAL of a thesis submitted by Scott Stuart McLeod This thesis has been read by each member of the thesis committee and has been found to be satisfactory regarding content, English usage, format, citation, bibliographic style, and consistency, and is ready for submission to the Division of Graduate Education. David R. Lageson Approved for the Department of Earth Sciences Stephan G. Custer Approved for the Division of Graduate Education Dr. Carl A. Fox iii STATEMENT OF PERMISSION TO USE In presenting this thesis in partial fulfillment of the requirements for a master’s degree at Montana State University, I agree that the Library shall make it available to borrowers under rules of the Library. If I have indicated my intention to copyright this thesis by including a copyright notice page, copying is allowable only for scholarly purposes, consistent with “fair use” as prescribed in the U.S. Copyright Law. Requests for permission for extended quotation from or reproduction of this thesis in whole or in parts may be granted only by the copyright holder. Scott Stuart McLeod May 2009 iv DEDICATION I dedicate this work to my parents, Grace and Rodney McLeod, for their tireless enthusiasm, encouragement and support, and to my friends and colleagues who never stopped believing in me – you know who you are. -

The Book of the Thousand Nights and a Night – Volume 10
THE BOOK OF THE THOUSAND NIGHTS AND A NIGHT A Plain and Literal Translation of the Arabian Nights Entertainments by Richard F. Burton VOLUME TEN The Dunyazad Digital Library www.dunyazad-library.net The Book Of The Thousand Nights And A Night A Plain and Literal Translation of the Arabian Nights Entertainments by Richard F. Burton First published 1885–1888 Volume Ten The Dunyazad Digital Library www.dunyazad-library.net The Dunyazad Digital Library (named in honor of Shahrazad’s sister) is based in Austria. According to Austrian law, the text of this book is in the public domain (“gemeinfrei”), since all rights expire 70 years after the author’s death. If this does not apply in the place of your residence, please respect your local law. However, with the exception of making backup or printed copies for your own personal use, you may not copy, forward, reproduce or by any means publish this e- book without our previous written consent. This restriction is only valid as long as this e-book is available at the www.dunyazad-library.net website. This e-book has been carefully edited. It may still contain OCR or transcription errors, but also intentional deviations from the available printed source(s) in typog- raphy and spelling to improve readability or to correct obvious printing errors. A Dunyazad Digital Library book Selected, edited and typeset by Robert Schaechter First published November 2014 Release 1.0 · November 2014 2 To His Excellency Yacoub Artin Pasha, Minister of Instruction, etc. etc. etc. Cairo. My Dear Pasha, During the last dozen years, since we first met at Cairo, you have done much for Egyptian folk-lore and you can do much more. -
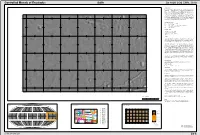
Hi-Resolution Map Sheet
Controlled Mosaic of Enceladus Khusrau Se 400K 0/180 CMN, 2018 GENERAL NOTES This map sheet is the 8th of a 15-quadrangle series covering the entire surface of Enceladus at a nominal scale of 1: 400 000. This map series is the third version of the Enceladus atlas and supersedes the release from 20101. The source of map data was the Cassini imaging experiment (Porco et al., 2004)2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian system. The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings and 216° West 210° 200° 190° 180° 170° 160° 150° 144° West moons from orbit; it entered Saturnian orbit on July 1st, 2004. The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem 22° 22° (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 20° 20° to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector consisting of a 1024 square array of pixels, each 12 microns on a side. MISR SULCI MAP SHEET DESIGNATION Se Enceladus (Saturnian satellite) 400K Scale 1 : 400 000 0/180 Center point in degrees consisting of latitude/west longitude CMN Controlled Mosaic with Nomenclature 2018 Year of publication IMAGE PROCESSING3 A - Radiometric correction of the images L - - Creation of a dense tie point network Y A - Multiple least-square bundle adjustments M A - Ortho-image mosaicking N 10° S U 10° L C I CONTROL For the Cassini mission, spacecraft position and camera pointing data are available in the form of SPICE kernels. -

The Book of the Thousand Nights and a Night, Volume 10 by Richard F
The Book of the Thousand Nights and a Night, Volume 10 by Richard F. Burton The Book of the Thousand Nights and a Night, Volume 10 by Richard F. Burton This etext was scanned by JC Byers (http://www.capitalnet.com/~jcbyers/index.htm) and proofread by JC Byers, Muhammad Hozien, K. C. McGuire, Renate Preuss, Robert Sinton, and Mats Wernersson. THE BOOK OF THE THOUSAND NIGHTS AND A NIGHT A Plain and Literal Translation of the Arabian Nights Entertainments Translated and Annotated by Richard F. Burton VOLUME TEN To His Excellency Yacoub Artin Pasha, page 1 / 673 Minister of Instruction, Etc. Etc. Etc. Cairo. My Dear Pasha, During the last dozen years, since we first met at Cairo, you have done much for Egyptian folk-lore and you can do much more. This volume is inscribed to you with a double purpose; first it is intended as a public expression of gratitude for your friendly assistance; and, secondly, as a memento that the samples which you have given us imply a promise of further gift. With this lively sense of favours to come I subscribe myself Ever yours friend and fellow worker, Richard F. Burton London, July 12, 1886. Contents of the Tenth Volume 169. Ma'aruf the Cobbler and His Wife Fatimah Conclusion Terminal Essay Appendix I.-- 1. Index to the Tales and Proper Names 2. Alphabetical Table of the Notes (Anthropological, &c.) page 2 / 673 3. Alphabetical Table of First lines-- a. English b. Arabic 4. Table of Contents of the Various Arabic Texts-- a. The Unfinished Calcutta Edition (1814-1818) b. -
Ancient Myths Ancient Wisdom
Ancient Myths, Ancient Wisdom: Recovering humanity's forgotten inheritance through Celestial Mythology David Warner Mathisen SECTIONS OF THIS COLLECTION Introduction 1 Esotericism and the Ancient System 5 Celestial Mechanics and the Heavenly Cycles 75 The Invisible Realm and the Shamanic 161 Star Myths and Astrotheology 259 Self and Higher Self 461 The Inner Connection to the Infinite 533 Humanity's Forgotten History 623 Two Visions 749 Illustration credits 821 Bibliography 834 List of all essays included in this book 843 Index 847 Introduction This book is a collection of selections from essays published on my blog, The Mathisen Corollary (also available on my newer website, Star Myths of the World), exploring the connection between the world's ancient myths and the heavenly landscape of the constellations and galaxies, through which move the sun, the moon, and the visible planets. The blog started in April of 2011, and by the fall of 2017 is now nearing its first thousandth post. The essays included here are selected from those first one thousand blog posts, organized by general subject and cross-referenced by page number (so that if one essay refers to something in another essay, the page number will be included, similar to the links within the original posts). During the earliest history of the blog, many posts were devoted to the subject of geology, and the overwhelming amount of evidence that our planet has suffered a major catastrophe in its past. While this is an extremely important topic, and related to the material that later became the main focus of most discussion (the connections between the stars and the myths), most of the material included here focuses upon the subject of "celestial mythology" -- the evidence that the sacred stories preserved by virtually every culture around the world, on every inhabited continent and island, appear to be built upon a common and very ancient system of celestial metaphor. -

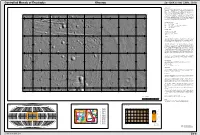
Controlled Mosaic of Enceladus Se 500K -90/0 CMN, 2010 Damascus Sulcus Se-15
Controlled Mosaic of Enceladus Damascus Sulcus Se 500K -90/0 CMN, 2010 GENERAL NOTES ° 0 This map sheet is the 15th of a 15-quadrangle series covering the entire surface of Enceladus at a nominal scale of 1: 500 000. The source of map data was the Cassini imaging experiment (Porco et al., 2004)1,2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian system. 330° The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings ° 30 and moons from orbit; it entered Saturnian orbit on July 1st, 2004. The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector consisting of a 1024 square array of pixels, each 12 microns on a side. D A MAP SHEET DESIGNATION M Se Enceladus (Saturnian satellite) 500K Scale 1 : 500 000 A -90/0 Center point in degrees consisting of latitude/west longitude 300° S CMN Controlled Mosaic with Nomenclature 60° B 2010 Year of publication C A G U IMAGE PROCESSING3 H S D - Radiometric correction - Geometric correction A - Photogrammetric adjustment using least-square and limb-fitting techniques C D - Map projection - Photometric correction using the Hapke bidirectional reflectance function A - Processing of the mosaic I R CONTROL O For the Cassini mission, spacecraft position and camera pointing data are available in the form of SPICE kernels. -

High Resolution Enceladus Atlas Derived from Cassini-ISS Images
High Resolution Enceladus Atlas derived from Cassini-ISS images Th. Roatsch(1), M. Wählisch(1), B. Giese(1), A. Hoffmeister(1), K.-D. Matz (1), F. Scholten(1), A. Kuhn(1), R. Wagner(1), G. Neukum(2), P. Helfenstein(3), and C. Porco(4). (1) Institute of Planetary Research, German Aerospace Center (DLR), Berlin, Germany; (2) Remote Sensing of the Earth and Planets, Freie Universität Berlin, Germany; (3) Department of Astronomy, Cornell University, Ithaca, NY, (4) CICLOPS/Space Science Institute, Boulder, CO. ([email protected]) Abstract The Cassini Imaging Science Subsystem (ISS) acquired 377 high-resolution images (< 1 km/pixel) during three close flybys of Enceladus in 2005 (Porco et al., 2006). We combined these images with lower-resolution Cassini images and four others taken by Voyager cameras to produce a high-resolution global controlled mosaic of Enceladus. This global mosaic is the baseline for a high-resolution Enceladus atlas that consists of 15 tiles mapped at a scale of 1:500,000. The nomenclature used in this atlas was proposed by the Cassini imaging team and was approved by the International Astronomical Union (IAU). The whole atlas is available to the public through the Imaging Team's website [http://ciclops.org/maps]. Keywords: Cassini, Icy Satellites, Planetary Mapping, Saturnian system 1. Introduction The Cassini spacecraft started its tour through the Saturnian system in July 2004. The Imaging Science Subsystem onboard the orbiter consists of a high-resolution Narrow Angle Camera (NAC) with a focal length of 2000 mm and a Wide Angle Camera (WAC) with a focal length of 200 mm (Porco et al., 2004).