Design and Implementation of a Control System for a Sailboat Robot ‡
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Autonomous Sailing Boats
Department of Computer Sciences Autonomous Sailing Boats Seminar aus Informatik (SS 2011) Eingereicht von: Christian Alt (0721203), [email protected] Natalie Wittinghofer (0620614), [email protected] Angefertigt am: Institut of Computer Science Salzburg Betreuung: Univ.-Prof. Dipl.-Ing. Dr.techn. Wolfgang Pree Salzburg, Juni 2011 CONTENTS I Contents 1 Introduction 1 2 Applications for autonomous sail boats 2 3 Hardware 3 3.1 Boats . .3 3.2 Sails . .4 3.3 Microcontroller and Sensors . .5 4 Software Architecture 8 4.1 Top-down planner based Model . .8 4.2 Bottom-up reactive system . .9 4.3 Hybrid architecture . .9 5 Communication 11 6 Control System 14 6.1 Control System by Abril and Salom [4] . 14 6.2 Control System by Stelzer et al. [18] . 15 7 Collision Avoidance 18 7.1 A Reactive Approach to Collision Avoidance . 18 7.2 A Raycast Approach to Collision Avoidance . 20 8 Simulation and testing 22 9 Conclusion 23 1 INTRODUCTION 1 1 Introduction Over the past decade there has been intense scientific work on autonomous sailing boats. As hardware gets smaller, cheaper and also better performing the possibilities increase for autonomous vessels. Recently there is a lot of research going on with the aim of reducing CO2 emissions. Au- tonomous sailing boats fit perfectly into these ambitions. Challenges of Autonomous Sailing Boats Building and programming an autonomous sailing boat holds several challenges: • Hardware challenges: Equipping a robotic sailing boat with microcontroller, sen- sors, actuators and other special hardware needed (e.g. solar panels) is very difficult. -
Chapter 3 Ship Compartmentation and Watertight Integrity
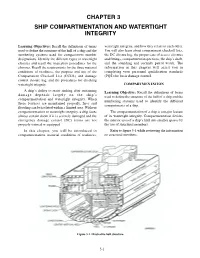
CHAPTER 3 SHIP COMPARTMENTATION AND WATERTIGHT INTEGRITY Learning Objectives: Recall the definitions of terms watertight integrity, and how they relate to each other. used to define the structure of the hull of a ship and the You will also learn about compartment checkoff lists, numbering systems used for compartment number the DC closure log, the proper care of access closures designations. Identify the different types of watertight and fittings, compartment inspections, the ship’s draft, closures and recall the inspection procedures for the and the sounding and security patrol watch. The closures. Recall the requirements for the three material information in this chapter will assist you in conditions of readiness, the purpose and use of the completing your personnel qualification standards Compartment Checkoff List (CCOL) and damage (PQS) for basic damage control. control closure log, and the procedures for checking watertight integrity. COMPARTMENTATION A ship’s ability to resist sinking after sustaining Learning Objective: Recall the definitions of terms damage depends largely on the ship’s used to define the structure of the hull of a ship and the compartmentation and watertight integrity. When numbering systems used to identify the different these features are maintained properly, fires and compartments of a ship. flooding can be isolated within a limited area. Without compartmentation or watertight integrity, a ship faces The compartmentation of a ship is a major feature almost certain doom if it is severely damaged and the of its watertight integrity. Compartmentation divides emergency damage control (DC) teams are not the interior area of a ship’s hull into smaller spaces by properly trained or equipped. -

Pennsylvania
Spring 1991 $1.50 Pennsylvania • The Keystone States Official Boating Magazine Viewpoint Recently we received a letter suggesting that we were being contradictory in Boat Pennsylvania. According to one reader, we suggested that boaters wear personal flota- tion devices, but that the magazine photographs don't always show their use. Obtaining photographs for a magazine can be a difficult proposition. Sometimes we stage situations and take the photographs ourselves. More often, we rely on photographs submitted by contributors. Photos that depict the general boating public often do not show people wearing PFDs simply because the incidence of wearing them is so low. If we were to say that we would only use photos that showed boaters wearing PFDs, we would have a difficult time fmding acceptable photos. Generally, we try to show people wearing PFDs in small boats in situations in which devices should obviously be worn. On large boats, people most often do not wear their PFDs. Should people wear PFDs? Statistics show that wearing a PFD can save your life. Are PFDs needed all the time? Because accidents happen when they are least expected, wearing a PFD all the time is a good idea. Practically, however, as comfortable as the newest PFDs are, they can be excruciating on a hot July day. Many boaters also want to get a little sun. We accept this and our statistics show that the chances of having an accident where a PFD would have been a factor are much lower in the summer months. Ofcourse, circumstances do exist in which wearing a PFD,even on the hottest day, is warranted. -

35 CFR Ch. I (7–1–98 Edition)
§ 109.5 35 CFR Ch. I (7±1±98 Edition) (b) The number of Canal deckhands not less than 100 square inches (645 to be placed on board a transiting ves- square centimeters) in areaÐpreferred sel to assist her crew in handling tow- dimensions are 12 x 9 inches (305 x 229 ing wires in the locks. millimeters)Ðand shall be capable of withstanding a strain of 100,000 pounds § 109.5 Ship's gear to be ready during (43,331 kilograms) on a towing wire transit; test. from any direction. Before beginning transit of the (e) Chocks designated as double Canal, a vessel shall have hawsers, chocks shall have a throat opening of lines and fenders ready for passing not less than 140 square inches (903 through the locks, for warping, towing, square centimeters) in areaÐpreferred or mooring as the case may be; and dimensions are 14 x 10 inches (356 x 254 shall have both anchors ready for let- millimeters)Ðand shall be capable of ting go. The Master shall assure him- withstanding a strain of 140,000 pounds self, by actual test, of the readiness of (64,000 kilograms) on the towing wires his vessel's main engines, steering from any direction. gear, engine room telegraphs, whistle, (f) Use of roller chocks is permissible rudder-angle and engine-revolution in- provided they are not less than 14.94 dicators, and anchors. During the tran- meters (49 feet) above the waterline at sit, at all times while a vessel is under- the vessel's maximum Panama Canal way or moored against the lock walls, draft and provided they are in good her deck winches, capstans, and other condition, meet all of the requirements power equipment for handling lines, as for solid chocks as specified in para- well as her mooring bitts, chocks, graphs (a), (b), (c), and (d) of this sec- cleats, hawse pipes, etc., shall be ready tion, as the case may be, and are so for handling the vessel, to the exclu- fitted that transition from the rollers sion of all other work. -
2012 Valid List Sorted by Base Handicap
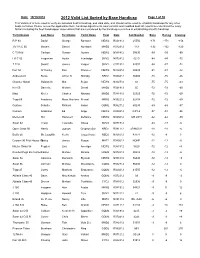
Date: 10/19/2012 2012 Valid List Sorted by Base Handicap Page 1 of 30 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap Yacht Design Last Name First Name Yacht Name Fleet Date Sail Number Base Racing Cruising R P 90 David George Rambler NEW2 R021912 25556 -171 -171 -156 J/V I R C 66 Meyers Daniel Numbers MHD2 R012912 119 -132 -132 -120 C T M 66 Carlson Gustav Aurora NEW2 N081412 50095 -99 -99 -90 I R C 52 Fragomen Austin Interlodge SMV2 N072412 5210 -84 -84 -72 T P 52 Swartz James Vesper SMV2 C071912 52007 -84 -87 -72 Farr 50 O' Hanley Ron Privateer NEW2 N072412 50009 -81 -81 -72 Andrews 68 Burke Arthur D Shindig NBD2 R060412 55655 -75 -75 -66 Chantier Naval Goldsmith Mat Sejaa NEW2 N042712 03 -75 -75 -63 Ker 55 Damelio Michael Denali MHD2 R031912 55 -72 -72 -60 Maxi Kiefer Charles Nirvana MHD2 R041812 32323 -72 -72 -60 Tripp 65 Academy Mass Maritime Prevail MRN2 N032212 62408 -72 -72 -60 Custom Schotte Richard Isobel GOM2 R062712 60295 -69 -69 -57 Custom Anderson Ed Angel NEW2 R020312 CAY-2 -57 -51 -36 Merlen 49 Hill Hammett Defiance NEW2 N020812 IVB 4915 -42 -42 -30 Swan 62 Tharp Twanette Glisse SMV2 N071912 -24 -18 -6 Open Class 50 Harris Joseph Gryphon Soloz NBD2 -
WIND MEASURING SYSTEMS Using Xdi-N Indicators
APPLICATION NOTES WIND MEASURING SYSTEMS using XDi-N indicators Document no.: 4189350080C Wind Measuring Systems Application notes, using XDi-N indicators Table of contents GENERAL INFORMATION .......................................................................................................... 4 WARNINGS, LEGAL INFORMATION AND SAFETY ............................................................................... 4 LEGAL INFORMATION AND DISCLAIMER ........................................................................................... 4 DISCLAIMER ................................................................................................................................. 4 SAFETY ISSUES ............................................................................................................................ 4 ELECTROSTATIC DISCHARGE AWARENESS ..................................................................................... 4 FACTORY SETTINGS ..................................................................................................................... 4 ABOUT THE APPLICATION NOTES........................................................................................... 5 GENERAL PURPOSE ...................................................................................................................... 5 INTENDED USERS ......................................................................................................................... 5 CONTENTS/OVERALL STRUCTURE ................................................................................................. -
View the Presentation
Presentation prepared for The Collectors Club New York The History of the Square-Rigged Sailing Vessels Jonas Hällström FRPSL 19 March 2014 The History of the Square-Sigged Sailing Vessels This booklet is the handout prepared for the presentation given to The Collectors Club in New York on 19 March 2014. Of 65 printed handouts this is number Presentation prepared for The Collectors Club The History of the Square-Rigged Sailing Vessels Jonas Hällström 19 March 2014 Thanks for inviting me! Jonas Hällström CCNY member since 2007 - 2 - The History of the Square-rigged Sailing Vessels 1988 First exhibited in Youth Class as Sailing Ships 2009 CHINA FIP Large Gold (95p) 2009 IBRA FEPA Large Gold (95p) 2010 JOBURG FIAP Large Gold (96p) 2010 ECTP FEPA Grand Prix ECTP 2013 AUSTRALIA FIP Large Gold (96p) European Championship for Thematic Philately Grand Prix 2010 in Paris The ”Development” (Story Line) as presented in the Introductory Statement (”Plan”) - 3 - Thematic The History of the Development Square-rigged Sailing Vessels The concept for this Storyline presentation (the slides) Thematic Information Thematic Philatelic item to be knowledge presented here Philatelic Information Philatelic knowledge The Collectors Club New York The legend about the The History of the sail and the Argonauts Square-rigged Sailing Vessels (introducing the story) The legend says that the idea about the sail on a boat came from ”The Papershell” (lat. Argonaute Argo). Mauritius 1969 The Collectors Club New York - 4 - The legend about the sail and the Argonauts (introducing the story) In Greek mythology it is said that the Argonauts sailed with the ship “Argo”. -

Valid List by Design
Date: 10/19/2012 2012 Valid List by Design, Adjustments Page 1 of 31 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap. Design Last Name Yacht Name Record Date Base LP Adj Spin Rig Prop Rec Misc Race Cruise 1 D35 Schimenti Zefiro Toma R043012 36 -9 -3 24 42 12 Metre Gregory Valiant R071212 3 +6 9 9 12 Metre Mc Millen 111 Onawa R011512 33 -6 27 33 5.5 Carney Lyric R082912 156 u156 u165 8 Metre Palm Quest N071612 111 111 117 Aerodyne 38 D' Alessandro Alexis R053112 39 39 48 Akilaria Class 40 Davis Amhas R072312 -9 -9 -3 Akilaria Class 40 Dreese Toothface R041012 -9 -9 0 Alben 54 Ketch Wiseman Legacy V R070212 57 +6 +6 69 78 Alberg 35 Prefontaine Helios R042312 201 -3 198 210 Alberg 37 Mintz L' Amarre R061612 156 +6 +3 +6 171 186 Albin Cumulus Droste Cumulus 3 R030412 189 189 204 Albin Nimbus 42 Pomfret Anne R052212 99 99 111 Alden 42 S D S M Vieira Cadence R011312 120 +6 +6 132 144 Alden 44 Rice Pilgrim N053112 111 +9 +6 126 141 Alden 44 Weisman Nostos R011312 111 +9 +6 126 132 Alden 45 Davin Querence R071912 87 +9 +6 102 108 Alden 45" Seagoer Dunne Cygnet N040212 141 141 147 Alerion 26 Lurie Mischief R040612 225 U225 U231 Alerion Express 28 Brown Lumen Solare C082212 -

The MARINER's MIRROR the JOURNAL of ~Ht ~Ocitt~ for ~Autical ~Tstarch
The MARINER'S MIRROR THE JOURNAL OF ~ht ~ocitt~ for ~autical ~tstarch. Antiquities. Bibliography. Folklore. Organisation. Architecture. Biography. History. Technology. Art. Equipment. Laws and Customs. &c., &c. Vol. III., No. 3· March, 1913. CONTENTS FOR MARCH, 1913. PAGE PAGE I. TWO FIFTEENTH CENTURY 4· A SHIP OF HANS BURGKMAIR. FISHING VESSELS. BY R. BY H. H. BRINDLEY • • 8I MORTON NANCE • • . 65 5. DocuMENTS, "THE MARINER's 2. NOTES ON NAVAL NOVELISTS. MIRROUR" (concluded.) CON· BY OLAF HARTELIE •• 7I TRIBUTED BY D. B. SMITH. 8S J. SOME PECULIAR SWEDISH 6. PuBLICATIONS RECEIVED . 86 COAST-DEFENCE VESSELS 7• WORDS AND PHRASES . 87 OF THE PERIOD I]62-I8o8 (concluded.) BY REAR 8. NOTES . • 89 ADMIRAL J. HAGG, ROYAL 9· ANSWERS .. 9I SwEDISH NAVY •• 77 IO. QUERIES .. 94 SOME OLD-TIME SHIP PICTURES. III. TWO FIFTEENTH CENTURY FISHING VESSELS. BY R. MORTON NANCE. WRITING in his Glossaire Nautique, concerning various ancient pictures of ships of unnamed types that had come under his observation, Jal describes one, not illustrated by him, in terms equivalent to these:- "The work of the engraver, Israel van Meicken (end of the 15th century) includes a ship of handsome appearance; of middling tonnage ; decked ; and bearing aft a small castle that has astern two of a species of turret. Her rounded bow has a stem that rises up with a strong curve inboard. Above the hawseholes and to starboard of the stem is placed the bowsprit, at the end 66 SOME OLD·TIME SHIP PICTURES. of which is fixed a staff terminating in an object that we have seen in no other vessel, and that we can liken only to a many rayed monstrance. -

R/V Weatherbird Fio.Usf.Edu/Vessels/Rv-Weatherbird
R/V Weatherbird Fio.usf.edu/vessels/rv-weatherbird The R/V Weatherbird II is the flagship of the FIO fleet. The 115-foot, 194-ton vessel is equipped with advanced laboratories, oceanographic devices and sensor technology designed to enable scientists and students to study and learn about various as- pects of the ocean’s biological, chemical, geological and physical characteristics. Researchers use the vessel to support advanced studies on the myriad of complex issues impacting global and coastal oceans, as well as life in the sea. The Weatherbird II has berths for 13 people, 780 square feet of work- ing deck space, 200 square feet of wet laboratory space and is capable of voyaging throughout the Gulf of Mexico and Caribbean. Specifications: Kongsberg K-Pos DP-11 Dynamic Positioning System Beam: 28 ft (8.5m) AIS equipped (Furuno FA-150) Draft: 8’6” (2.6m) Nav: Trimble SPS356 GNSS, Garmin GPS, Northstar 941x Cruising Speed: 10 knots KVH V7 Mini-VSAT Broadband, Iridium ITU1000, Sirius/XM Maneuvering Speed: .5-10 knots Port and Starboard side pole mount receivers on main deck Cruising Range: 3500 miles (5630 km) Bow thruster: Shottel SPJ57 azimuthing thruster Endurance: 12 days Fresh & saltwater in labs and on main deck Main Engines: (2) Cummins QSK19 680 HP (Refit in 2015) Aft Winch: Dynacon cantilever winch; Starboard A-Frame winches: Marco hydraulic research winch, SeaMac hydro winch Generators: Twin GM 6-71, 75 kW Main winch: 3/8”, 3x19 torque balanced wire rope 110 and 208 VAC—100 amp Electrical System Aft frame: 14.5’ W x 23’H, SWL: 10,000 lbs. -
Triton2 Operator Manual
Triton2 Operator Manual ENGLISH www.bandg.com Preface Disclaimer As Navico is continuously improving this product, we retain the right to make changes to the product at any time which may not be reflected in this version of the manual. Please contact your nearest distributor if you require any further assistance. It is the owner’s sole responsibility to install and use the equipment in a manner that will not cause accidents, personal injury or property damage. The user of this product is solely responsible for observing safe boating practices. NAVICO HOLDING AS AND ITS SUBSIDIARIES, BRANCHES AND AFFILIATES DISCLAIM ALL LIABILITY FOR ANY USE OF THIS PRODUCT IN A WAY THAT MAY CAUSE ACCIDENTS, DAMAGE OR THAT MAY VIOLATE THE LAW. Governing Language: This statement, any instruction manuals, user guides and other information relating to the product (Documentation) may be translated to, or has been translated from, another language (Translation). In the event of any conflict between any Translation of the Documentation, the English language version of the Documentation will be the official version of the Documentation. This manual represents the product as at the time of printing. Navico Holding AS and its subsidiaries, branches and affiliates reserve the right to make changes to specifications without notice. Trademarks NMEA® and NMEA 2000® are registered trademarks of the National Marine Electronics Association. Copyright Copyright © 2016 Navico Holding AS. Warranty The warranty card is supplied as a separate document. In case of any queries, refer to the brand website of your display or system: www.bandg.com. Preface | Triton2 Operator manual 3 Compliance statements This equipment complies with: • CE under EMC directive 2014/30/EU • The requirements of level 2 devices of the Radio communications (Electromagnetic Compatibility) standard 2008 The relevant Declaration of conformity is available in the product's section at the following website: www.bandg.com. -

The Physics of Sqiling Bryond
The physics of sqiling BryonD. Anderson Sqilsond keels,like oirplone wings, exploit Bernoulli's principle. Aerodynomicond hydrodynomicinsighis help designeri creqte fosterioilboots. BryonAnderson is on experimentolnucleor physicist ond,choirmon of the physicsdeportment ot KentSlote University in Kent,Ohio. He is olsoon ovocotionolsoilor who lecfuresond wrifesobout the intersectionbehyeen physics ond soiling. In addition to the recreational pleasure sailing af- side and lower on the downwind side. fords, it involves some interesting physics.Sailing starts with For downwind sailing, with the sail oriented perpen- the force of the wind on the sails.Analyzing that interaction dicular to the wind directiory the pressure increase on the up- yields some results not commonly known to non-sailors. It wind side is greater than the pressure decrease on the down- turns ou! for example, that downwind is not the fastestdi- wind side. As one turns the boat more and more into the rection for sailing. And there are aerodynamic issues.Sails direction from which the wind is coming, those differences and keels work by providing "lift" from the fluid passing reverse, so that with the wind perpendicular to the motion of around them. So optimizing keel and wing shapesinvolves the boat, the pressure decrease on the downwind side is wing theory. greater than the pressure increase on the upwind side. For a The resistance experienced by a moving sailboat in- boat sailing almost directly into the wind, the pressure de- cludes the effects of waves, eddiei, and turb-ulencein the crease on the downwind side is much greater than the in- water, and of the vortices produced in air by the sails.To re- crease on the upwind side.