Triton2 Operator Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Recommendation for the Application of SOLAS Regulation V/15 No.95
No.95 Recommendation for the Application of SOLAS (Oct 2007) (Corr.1 Regulation V/15 Mar 2009) (Corr.2 Bridge Design, Equipment Arrangement and July 2011) Procedures (BDEAP) Foreword This Recommendation sets forth a set of guidelines for determining compliance with the principles and aims of SOLAS regulation V/15 relating to bridge design, design and arrangement of navigational systems and equipment and bridge procedures when applying the requirements of SOLAS regulations V/19, 22, 24, 25, 27 and 28 at the time of delivery of the newbuilding. The development of this Recommendation has been based on the international regulatory regime and IMO instruments and standards already accepted and referred to by IMO. The platform for the Recommendation is: • the aims specified in SOLAS regulation V/15 for application of SOLAS regulations V/19, 22, 24, 25, 27 and 28 • the content of SOLAS regulations V/19, 22, 24, 25, 27, 28 • applicable parts of MSC/Circ.982, “Guidelines on ergonomic criteria for bridge equipment and layout” • applicable parts of IMO resolutions and performance standards referred to in SOLAS • applicable parts of ISO and IEC standards referred to for information in MSC/Circ.982 • STCW Code • ISM Code This Recommendation is developed to serve as a self-contained document for the understanding and application of the requirements, supported by: • Annex A giving guidance and examples on how the requirements set forth may be met by acceptable technical solutions. The guidance is not regarded mandatory in relation to the requirements and does not in any way exclude alternative solutions that may fulfil the purpose of the requirements. -

IS42 Operator Manual
IS42 Operator Manual ENGLISH www.simrad-yachting.com Preface Disclaimer As Navico is continuously improving this product, we retain the right to make changes to the product at any time which may not be reflected in this version of the manual. Please contact your nearest distributor if you require any further assistance. It is the owner’s sole responsibility to install and use the equipment in a manner that will not cause accidents, personal injury or property damage. The user of this product is solely responsible for observing safe boating practices. NAVICO HOLDING AS AND ITS SUBSIDIARIES, BRANCHES AND AFFILIATES DISCLAIM ALL LIABILITY FOR ANY USE OF THIS PRODUCT IN A WAY THAT MAY CAUSE ACCIDENTS, DAMAGE OR THAT MAY VIOLATE THE LAW. Governing Language: This statement, any instruction manuals, user guides and other information relating to the product (Documentation) may be translated to, or has been translated from, another language (Translation). In the event of any conflict between any Translation of the Documentation, the English language version of the Documentation will be the official version of the Documentation. This manual represents the product as at the time of printing. Navico Holding AS and its subsidiaries, branches and affiliates reserve the right to make changes to specifications without notice. Trademarks Simrad® is used by license from Kongsberg. NMEA® and NMEA 2000® are registered trademarks of the National Marine Electronics Association. Copyright Copyright © 2016 Navico Holding AS. Warranty The warranty card is supplied as a separate document. In case of any queries, refer to the brand website of your display or system: www.simrad-yachting.com. -
Chapter 3 Ship Compartmentation and Watertight Integrity
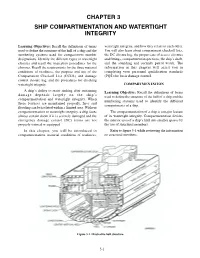
CHAPTER 3 SHIP COMPARTMENTATION AND WATERTIGHT INTEGRITY Learning Objectives: Recall the definitions of terms watertight integrity, and how they relate to each other. used to define the structure of the hull of a ship and the You will also learn about compartment checkoff lists, numbering systems used for compartment number the DC closure log, the proper care of access closures designations. Identify the different types of watertight and fittings, compartment inspections, the ship’s draft, closures and recall the inspection procedures for the and the sounding and security patrol watch. The closures. Recall the requirements for the three material information in this chapter will assist you in conditions of readiness, the purpose and use of the completing your personnel qualification standards Compartment Checkoff List (CCOL) and damage (PQS) for basic damage control. control closure log, and the procedures for checking watertight integrity. COMPARTMENTATION A ship’s ability to resist sinking after sustaining Learning Objective: Recall the definitions of terms damage depends largely on the ship’s used to define the structure of the hull of a ship and the compartmentation and watertight integrity. When numbering systems used to identify the different these features are maintained properly, fires and compartments of a ship. flooding can be isolated within a limited area. Without compartmentation or watertight integrity, a ship faces The compartmentation of a ship is a major feature almost certain doom if it is severely damaged and the of its watertight integrity. Compartmentation divides emergency damage control (DC) teams are not the interior area of a ship’s hull into smaller spaces by properly trained or equipped. -
WIND MEASURING SYSTEMS Using Xdi-N Indicators
APPLICATION NOTES WIND MEASURING SYSTEMS using XDi-N indicators Document no.: 4189350080C Wind Measuring Systems Application notes, using XDi-N indicators Table of contents GENERAL INFORMATION .......................................................................................................... 4 WARNINGS, LEGAL INFORMATION AND SAFETY ............................................................................... 4 LEGAL INFORMATION AND DISCLAIMER ........................................................................................... 4 DISCLAIMER ................................................................................................................................. 4 SAFETY ISSUES ............................................................................................................................ 4 ELECTROSTATIC DISCHARGE AWARENESS ..................................................................................... 4 FACTORY SETTINGS ..................................................................................................................... 4 ABOUT THE APPLICATION NOTES........................................................................................... 5 GENERAL PURPOSE ...................................................................................................................... 5 INTENDED USERS ......................................................................................................................... 5 CONTENTS/OVERALL STRUCTURE ................................................................................................. -
View the Presentation
Presentation prepared for The Collectors Club New York The History of the Square-Rigged Sailing Vessels Jonas Hällström FRPSL 19 March 2014 The History of the Square-Sigged Sailing Vessels This booklet is the handout prepared for the presentation given to The Collectors Club in New York on 19 March 2014. Of 65 printed handouts this is number Presentation prepared for The Collectors Club The History of the Square-Rigged Sailing Vessels Jonas Hällström 19 March 2014 Thanks for inviting me! Jonas Hällström CCNY member since 2007 - 2 - The History of the Square-rigged Sailing Vessels 1988 First exhibited in Youth Class as Sailing Ships 2009 CHINA FIP Large Gold (95p) 2009 IBRA FEPA Large Gold (95p) 2010 JOBURG FIAP Large Gold (96p) 2010 ECTP FEPA Grand Prix ECTP 2013 AUSTRALIA FIP Large Gold (96p) European Championship for Thematic Philately Grand Prix 2010 in Paris The ”Development” (Story Line) as presented in the Introductory Statement (”Plan”) - 3 - Thematic The History of the Development Square-rigged Sailing Vessels The concept for this Storyline presentation (the slides) Thematic Information Thematic Philatelic item to be knowledge presented here Philatelic Information Philatelic knowledge The Collectors Club New York The legend about the The History of the sail and the Argonauts Square-rigged Sailing Vessels (introducing the story) The legend says that the idea about the sail on a boat came from ”The Papershell” (lat. Argonaute Argo). Mauritius 1969 The Collectors Club New York - 4 - The legend about the sail and the Argonauts (introducing the story) In Greek mythology it is said that the Argonauts sailed with the ship “Argo”. -

R/V Weatherbird Fio.Usf.Edu/Vessels/Rv-Weatherbird
R/V Weatherbird Fio.usf.edu/vessels/rv-weatherbird The R/V Weatherbird II is the flagship of the FIO fleet. The 115-foot, 194-ton vessel is equipped with advanced laboratories, oceanographic devices and sensor technology designed to enable scientists and students to study and learn about various as- pects of the ocean’s biological, chemical, geological and physical characteristics. Researchers use the vessel to support advanced studies on the myriad of complex issues impacting global and coastal oceans, as well as life in the sea. The Weatherbird II has berths for 13 people, 780 square feet of work- ing deck space, 200 square feet of wet laboratory space and is capable of voyaging throughout the Gulf of Mexico and Caribbean. Specifications: Kongsberg K-Pos DP-11 Dynamic Positioning System Beam: 28 ft (8.5m) AIS equipped (Furuno FA-150) Draft: 8’6” (2.6m) Nav: Trimble SPS356 GNSS, Garmin GPS, Northstar 941x Cruising Speed: 10 knots KVH V7 Mini-VSAT Broadband, Iridium ITU1000, Sirius/XM Maneuvering Speed: .5-10 knots Port and Starboard side pole mount receivers on main deck Cruising Range: 3500 miles (5630 km) Bow thruster: Shottel SPJ57 azimuthing thruster Endurance: 12 days Fresh & saltwater in labs and on main deck Main Engines: (2) Cummins QSK19 680 HP (Refit in 2015) Aft Winch: Dynacon cantilever winch; Starboard A-Frame winches: Marco hydraulic research winch, SeaMac hydro winch Generators: Twin GM 6-71, 75 kW Main winch: 3/8”, 3x19 torque balanced wire rope 110 and 208 VAC—100 amp Electrical System Aft frame: 14.5’ W x 23’H, SWL: 10,000 lbs. -

Anchor Chain and Windlass?
Anchor loss - technical and operational challenges and recommendations DNV GL, Gard and The Swedish Club March 2016 Ungraded © DNV GL AS 2016. All rights reserved 1 DNV GL © 2016 29 February 2016 SAFER, SMARTER, GREENER Anchor loss – prevention - Content ° Background ° Technical issues and recommendations ° Operational issues and recommendations ° Legal notice Ungraded 2 DNV GL © 2016 29 February 2016 Why focus on anchor loss - lost per year? Anchors lost per 100 ship year since 2007 ° DNV GL has observed a relatively high number of anchor losses with 8-10 anchors lost per 1000 ships per year and a negative trend in 2014/2015 Anchor lost due to D-link opening up DNV GL Anchors lost per 100 ship year ( DNV GL fleet) Ungraded 3 DNV GL © 2016 29 February 2016 Anchor losses per ship type Anchors lost per 100 ship year & ship type ° Tanker for oil and Passenger Ships more exposed ° Reflecting the ship type trading pattern? Anchor losses per 100 ship-year and ship type 1,200 1,000 0,800 0,600 0,400 0,200 Loss per 100 Shipyear DNV Fleet 2010-2015 0,000 DNV GL Anchors lost per 100 ship year & ship type ( DNV fleet) Ungraded 4 DNV GL © 2016 29 February 2016 Costs involved with loss of anchors Swedish Club claims including deductible – loss of anchor Swedish Club claims including deductible ° Direct cost to replace lost anchor and chain ° Gard has seen increasing costs related to recovering lost anchors amounting up to USD 50 000 ° Delays and off-hire ° Cost due to grounding / collision / damage to subsea equipment etc. -

Nevada Boating Laws
OF NEVADA BOATING LAWS Sponsored by Copyright © 2019 Kalkomey Enterprises, LLC and its divisions and partners, www.kalkomey.com The Department of Wildlife is responsible for the safety education of Nevada boaters. The BOAT NEVADA safe boating program is recognized nationally and approved by the National Association of State Boating Law Administrators. Completing a boating safety course will make your time on the water safer and more enjoyable. Many insurance companies offer a discount for successful completion. Nevada boaters have three ways to become certified in boating safety with SafeNEVADA Boating Program Over the Internet… NEVADALearn what you need to be a safe boat operator online! 1. The complete course with exciting visuals awaits you on the Internet. Interactive graphics help you learn and retain information on boating safely in Nevada. Successfully complete the online test, and you will receive a State of Nevada boating safety certificate by mail. There is a nominal fee for online certification. Start today at www.ndow.org/boat/ or www.boat-ed.com/nevada In a classroom… Share the learning experience with other boaters and 2. a qualified instructor. Call the Nevada Department of Wildlife to locate the next classroom course in your area. Northern Nevada, call 775-688-1500 Southern Nevada, call 702-486-5127 By correspondence… Study at home with the Boat Nevada manual. Then take 3. the certification exam at home and mail it to the Nevada Department of Wildlife for grading and certification. Northern Nevada, call 775-688-1500 Southern Nevada, call 702-486-5127 Copyright © 2019 Kalkomey Enterprises, LLC and its divisions and partners, www.kalkomey.com OF NEVADA BOATING LAWS NOTE: The information in this handbook is intended to be used only as a summary of the boating laws and regulations in Nevada. -

Concrete Terminology
DIVISION 3 - CAST IN PLACE CONCRETE TERMINOLOGY A. CONCRETE: A mixture of 1 part Portland Cement ( 22 lbs ) 2 Parts Dry Sand ( 41 lbs ) 3 Parts Dry Aggregate ( 70 lbs ) ½ Part Water ( 10 lbs ) Admixtures ( 7 lbs ) Total Weight Per Cu. Foot = 150 lbs. Area of 1 CU. FT. 1,728 cu. Inches 1. CAST IN PLACE CONCRETE: Concrete that is formed, poured and cured in it’s permanent position. 2. CURED CONCRETE: Concrete which has reached dehydration and obtained it’s maximum compressive strength. 3. GREEN CONCRETE: Concrete which remains hydrated and is in it’s earliest setting stage and has not hardened or cured appreciably. 4. LIGHTWEIGHT CONCRETE: A concrete mixture of substantially lower unit weight and compressive strength than that made from crushed stone or rock aggregate. Typically used on upper floors or roof tops where normal compressive strength is not a requirement and weight is a factor. 5. MONOLITHILIC CONCRETE: A single pour which includes the footing and slab concrete in a single pour . 6. POST-TENSION CONCRETE: A method of stressing reinforced concrete by which the tendons or cables are tightened after the concrete slab has hardened and in place. 24 7. PRE-CAST CONCRETE: Concrete which is cast and cured in a place other than it’s final resting position. ( Beams, Columns, Slabs, Lintels ) 8. PRE-STRESSED CONCRETE: A process of preparing concrete slabs and beams for extra strength by pouring concrete over tightly drawn steel cables, steel rods or tendons. 9. REINFORCED CONCRETE: Concrete with added materials such as steel rod, wire mesh, fiber mesh, dowel bars, expanded metal fabric, or cold drawn wire cable which act together with the concrete to resist cracking or movement B. -

Ockam System Manual
OCKAM SYSTEM MANUAL Edition of February 17, 2009 Copyright © 1984-2009 by Ockam Instruments, Inc., All rights reserved. No part of this book may be reproduced in any form without permission in writing from the publisher. Printed in the United States of America Ockam Instruments Inc. 215 Research Drive Milford, CT 06460 (203) 877-7453 (203) 878-0572 (Fax) http://www.ockam.com Revised 2/17/09 PAGE 1 READ THIS FIRST Thank you for considering Ockam Instruments, the world’s best sailing instrument system. Sailboat instruments, like the boats they go on are at least semi-custom products. Each installation will differ from others in capability and features. Ockam uses a modular approach to allow the greatest flexibility in capability. A professional electronics expert is usually needed to properly design, install and set up the system. • To read a description of the Ockam Instrument system, read Sections 1 & 2. • For installation, read Section 3. • Calibration? Go to Section 3 - Calibration. • Got a problem with the system? Go to Section 3 - Troubleshooting. Page 2 Revised 2/17/09 Table of Contents Section 1 - System Architecture.................................................................................................11 Systems................................................................................................................................... 12 Displays ................................................................................................................................... 12 Control .................................................................................................................................... -

Glossary of Terms (List Will Be Updated on a Continual Basis)
Glossary of Terms (list will be updated on a continual basis) The words below are new to our Glossary of Terms. These words will be integrated into our overall list, which is below the new words. Chafing Gear – pads, mats, ropes and other materials tied around pieces of rigging to protect them from rubbing on spars and other parts of the rig Foxes – pieces of scrap line made by twisting together several strands or yarns Hand, Reef & Steer – traditional qualifications of an able seaman, to hand is to take in or furl a sail and to reef is to shorten sail and to steer is to take a turn at the helm Helmsman – the Sailor stationed at the ship’s helm (wheel) in charge of steering and keeping a straight course Marline – light, two-stranded line; often tarred and used for seizings Marlinespike – a tapered metal spike used to separate strands of rope, untie knots and as a handle for hauling away on seizings, whippings, etc. Merchant Service – the industry concerned with commercial shipping ventures (i.e., non-military) Rating – denotes a Sailor’s rank, responsibilities and rate of pay (i.e., able seaman, ordinary seaman, boy, etc.) Rigging – the lines and ropes that hold the masts, spars and sails Sail Making – the work of mending, replacing and sewing sails; the sail maker would often advise on how best to set and trim sails Seizing – method of binding two ropes or objects together involving wrapping them tightly with line Splice – weaving together to strands of separate ropes to form one longer rope Watches – division of labor aboard ship; the -
Operation Guide
OPERATION GUIDE HYDROVANE llllllll HYDROVANE INTERNATIONAL MARINE 2424 HAYWOOD AVE WEST VANCOUVER | BC CANADA | V7V 1Y1 STEERING THE DREAM www.hydrovane.com OPERATION & TROUBLESHOOTING GUIDE OCTOBER 2017 We are always pleased to receive photos and performance reports! If you are having any type of problem, please read this guide carefully and do not hesitate to contact us so we can work through it with you. CONTENTS A. OPERATION OVERVIEW .................................................................................................... 2 Sailing – Hydrovane in Use ................................................................................................................................. 2 Sailing – Hydrovane Not In Use ......................................................................................................................... 2 Motoring – Hydrovane Not In Use .................................................................................................................... 3 Motoring – Hydrovane In Use with Tiller Pilot ................................................................................................ 3 Hydrovane Rudder and Maneuverability ........................................................................................................ 4 B. VARIABLE CONTROLS – RATIO AND VANE AXIS .............................................................. 5 Ratio Control (Steerage) .....................................................................................................................................