Boat Hull Hydrodynamics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Steering and Stabilisation Set a Course for Optimum Reliability and Performance
Marine Steering and stabilisation Set a course for optimum reliability and performance 1 Systems that keep vessels safely on course and comfortable in all conditions Since pioneering electro-hydraulic steering gear nearly a century ago, we continue to develop new systems for vessels ranging from large tankers to super yachts. Customers benefit from the world leading hydrodynamics expertise and the design resources of the Rolls-Royce rudder, steering gear, stabilisation and propulsion specialists, who cooperate to address and handle challenging projects and deliver system solutions. This minimises technical risk as well as maximising vessel performance. move Contents: Steering gear page 4 Promas page 10 Rudders page 12 Stabilisers page 18 Customer support page 22 movemake the right Steering gear Rotary vane steering gear for smaller vessels The SR series is designed with integrated frequency controlled pumps. General description Rolls-Royce supplies a complete range of steering gear, suitable for selection, alarm panels and rudder angle indicators or just a portion all types and sizes of ships. The products are designed as complete of this. The system is also prepared for interface to VDR, ships main steering systems with the actuator, power pack, steering control, alarm system, autopilot, joystick and DP when requested. Due to a alarm and rudder angle indicating system in mind, and can wide range of demands, great care has been taken from material therefore be delivered with complete control systems, including selection through construction, -

Coast Guard, DHS § 164.33
Coast Guard, DHS § 164.33 the United States unless no more than on a regular basis at least once every 12 hours before entering or getting un- three months. This drill must include derway, the following equipment has at a minimum the following: been tested: (1) Operation of the main steering (1) Primary and secondary steering gear from within the steering gear gear. The test procedure includes a vis- compartment. ual inspection of the steering gear and (2) Operation of the means of commu- its connecting linkage, and, where ap- nications between the navigating plicable, the operation of the following: bridge and the steering compartment. (i) Each remote steering gear control (3) Operation of the alternative power system. supply for the steering gear if the ves- (ii) Each steering position located on sel is so equipped. the navigating bridge. (92 Stat. 1471 (33 U.S.C. 1221 et seq.); 49 CFR (iii) The main steering gear from the 1.46(n)(4)) alternative power supply, if installed. (iv) Each rudder angle indicator in [CGD 77–183, 45 FR 18925, Mar. 24, 1980, as relation to the actual position of the amended by CGD 83–004, 49 FR 43466, Oct. 29, 1984] rudder. (v) Each remote steering gear control § 164.30 Charts, publications, and system power failure alarm. equipment: General. (vi) Each remote steering gear power No person may operate or cause the unit failure alarm. operation of a vessel unless the vessel (vii) The full movement of the rudder has the marine charts, publications, to the required capabilities of the and equipment as required by §§ 164.33 steering gear. -
Chapter 3 Ship Compartmentation and Watertight Integrity
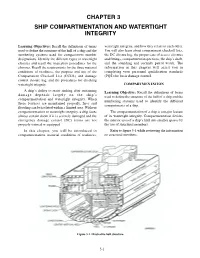
CHAPTER 3 SHIP COMPARTMENTATION AND WATERTIGHT INTEGRITY Learning Objectives: Recall the definitions of terms watertight integrity, and how they relate to each other. used to define the structure of the hull of a ship and the You will also learn about compartment checkoff lists, numbering systems used for compartment number the DC closure log, the proper care of access closures designations. Identify the different types of watertight and fittings, compartment inspections, the ship’s draft, closures and recall the inspection procedures for the and the sounding and security patrol watch. The closures. Recall the requirements for the three material information in this chapter will assist you in conditions of readiness, the purpose and use of the completing your personnel qualification standards Compartment Checkoff List (CCOL) and damage (PQS) for basic damage control. control closure log, and the procedures for checking watertight integrity. COMPARTMENTATION A ship’s ability to resist sinking after sustaining Learning Objective: Recall the definitions of terms damage depends largely on the ship’s used to define the structure of the hull of a ship and the compartmentation and watertight integrity. When numbering systems used to identify the different these features are maintained properly, fires and compartments of a ship. flooding can be isolated within a limited area. Without compartmentation or watertight integrity, a ship faces The compartmentation of a ship is a major feature almost certain doom if it is severely damaged and the of its watertight integrity. Compartmentation divides emergency damage control (DC) teams are not the interior area of a ship’s hull into smaller spaces by properly trained or equipped. -

Pennsylvania
Spring 1991 $1.50 Pennsylvania • The Keystone States Official Boating Magazine Viewpoint Recently we received a letter suggesting that we were being contradictory in Boat Pennsylvania. According to one reader, we suggested that boaters wear personal flota- tion devices, but that the magazine photographs don't always show their use. Obtaining photographs for a magazine can be a difficult proposition. Sometimes we stage situations and take the photographs ourselves. More often, we rely on photographs submitted by contributors. Photos that depict the general boating public often do not show people wearing PFDs simply because the incidence of wearing them is so low. If we were to say that we would only use photos that showed boaters wearing PFDs, we would have a difficult time fmding acceptable photos. Generally, we try to show people wearing PFDs in small boats in situations in which devices should obviously be worn. On large boats, people most often do not wear their PFDs. Should people wear PFDs? Statistics show that wearing a PFD can save your life. Are PFDs needed all the time? Because accidents happen when they are least expected, wearing a PFD all the time is a good idea. Practically, however, as comfortable as the newest PFDs are, they can be excruciating on a hot July day. Many boaters also want to get a little sun. We accept this and our statistics show that the chances of having an accident where a PFD would have been a factor are much lower in the summer months. Ofcourse, circumstances do exist in which wearing a PFD,even on the hottest day, is warranted. -

35 CFR Ch. I (7–1–98 Edition)
§ 109.5 35 CFR Ch. I (7±1±98 Edition) (b) The number of Canal deckhands not less than 100 square inches (645 to be placed on board a transiting ves- square centimeters) in areaÐpreferred sel to assist her crew in handling tow- dimensions are 12 x 9 inches (305 x 229 ing wires in the locks. millimeters)Ðand shall be capable of withstanding a strain of 100,000 pounds § 109.5 Ship's gear to be ready during (43,331 kilograms) on a towing wire transit; test. from any direction. Before beginning transit of the (e) Chocks designated as double Canal, a vessel shall have hawsers, chocks shall have a throat opening of lines and fenders ready for passing not less than 140 square inches (903 through the locks, for warping, towing, square centimeters) in areaÐpreferred or mooring as the case may be; and dimensions are 14 x 10 inches (356 x 254 shall have both anchors ready for let- millimeters)Ðand shall be capable of ting go. The Master shall assure him- withstanding a strain of 140,000 pounds self, by actual test, of the readiness of (64,000 kilograms) on the towing wires his vessel's main engines, steering from any direction. gear, engine room telegraphs, whistle, (f) Use of roller chocks is permissible rudder-angle and engine-revolution in- provided they are not less than 14.94 dicators, and anchors. During the tran- meters (49 feet) above the waterline at sit, at all times while a vessel is under- the vessel's maximum Panama Canal way or moored against the lock walls, draft and provided they are in good her deck winches, capstans, and other condition, meet all of the requirements power equipment for handling lines, as for solid chocks as specified in para- well as her mooring bitts, chocks, graphs (a), (b), (c), and (d) of this sec- cleats, hawse pipes, etc., shall be ready tion, as the case may be, and are so for handling the vessel, to the exclu- fitted that transition from the rollers sion of all other work. -

The MARINER's MIRROR the JOURNAL of ~Ht ~Ocitt~ for ~Autical ~Tstarch
The MARINER'S MIRROR THE JOURNAL OF ~ht ~ocitt~ for ~autical ~tstarch. Antiquities. Bibliography. Folklore. Organisation. Architecture. Biography. History. Technology. Art. Equipment. Laws and Customs. &c., &c. Vol. III., No. 3· March, 1913. CONTENTS FOR MARCH, 1913. PAGE PAGE I. TWO FIFTEENTH CENTURY 4· A SHIP OF HANS BURGKMAIR. FISHING VESSELS. BY R. BY H. H. BRINDLEY • • 8I MORTON NANCE • • . 65 5. DocuMENTS, "THE MARINER's 2. NOTES ON NAVAL NOVELISTS. MIRROUR" (concluded.) CON· BY OLAF HARTELIE •• 7I TRIBUTED BY D. B. SMITH. 8S J. SOME PECULIAR SWEDISH 6. PuBLICATIONS RECEIVED . 86 COAST-DEFENCE VESSELS 7• WORDS AND PHRASES . 87 OF THE PERIOD I]62-I8o8 (concluded.) BY REAR 8. NOTES . • 89 ADMIRAL J. HAGG, ROYAL 9· ANSWERS .. 9I SwEDISH NAVY •• 77 IO. QUERIES .. 94 SOME OLD-TIME SHIP PICTURES. III. TWO FIFTEENTH CENTURY FISHING VESSELS. BY R. MORTON NANCE. WRITING in his Glossaire Nautique, concerning various ancient pictures of ships of unnamed types that had come under his observation, Jal describes one, not illustrated by him, in terms equivalent to these:- "The work of the engraver, Israel van Meicken (end of the 15th century) includes a ship of handsome appearance; of middling tonnage ; decked ; and bearing aft a small castle that has astern two of a species of turret. Her rounded bow has a stem that rises up with a strong curve inboard. Above the hawseholes and to starboard of the stem is placed the bowsprit, at the end 66 SOME OLD·TIME SHIP PICTURES. of which is fixed a staff terminating in an object that we have seen in no other vessel, and that we can liken only to a many rayed monstrance. -

The Physics of Sqiling Bryond
The physics of sqiling BryonD. Anderson Sqilsond keels,like oirplone wings, exploit Bernoulli's principle. Aerodynomicond hydrodynomicinsighis help designeri creqte fosterioilboots. BryonAnderson is on experimentolnucleor physicist ond,choirmon of the physicsdeportment ot KentSlote University in Kent,Ohio. He is olsoon ovocotionolsoilor who lecfuresond wrifesobout the intersectionbehyeen physics ond soiling. In addition to the recreational pleasure sailing af- side and lower on the downwind side. fords, it involves some interesting physics.Sailing starts with For downwind sailing, with the sail oriented perpen- the force of the wind on the sails.Analyzing that interaction dicular to the wind directiory the pressure increase on the up- yields some results not commonly known to non-sailors. It wind side is greater than the pressure decrease on the down- turns ou! for example, that downwind is not the fastestdi- wind side. As one turns the boat more and more into the rection for sailing. And there are aerodynamic issues.Sails direction from which the wind is coming, those differences and keels work by providing "lift" from the fluid passing reverse, so that with the wind perpendicular to the motion of around them. So optimizing keel and wing shapesinvolves the boat, the pressure decrease on the downwind side is wing theory. greater than the pressure increase on the upwind side. For a The resistance experienced by a moving sailboat in- boat sailing almost directly into the wind, the pressure de- cludes the effects of waves, eddiei, and turb-ulencein the crease on the downwind side is much greater than the in- water, and of the vortices produced in air by the sails.To re- crease on the upwind side. -

Naval Ships' Technical Manual, Chapter 583, Boats and Small Craft
S9086-TX-STM-010/CH-583R3 REVISION THIRD NAVAL SHIPS’ TECHNICAL MANUAL CHAPTER 583 BOATS AND SMALL CRAFT THIS CHAPTER SUPERSEDES CHAPTER 583 DATED 1 DECEMBER 1992 DISTRIBUTION STATEMENT A: APPROVED FOR PUBLIC RELEASE, DISTRIBUTION IS UNLIMITED. PUBLISHED BY DIRECTION OF COMMANDER, NAVAL SEA SYSTEMS COMMAND. 24 MAR 1998 TITLE-1 @@FIpgtype@@TITLE@@!FIpgtype@@ S9086-TX-STM-010/CH-583R3 Certification Sheet TITLE-2 S9086-TX-STM-010/CH-583R3 TABLE OF CONTENTS Chapter/Paragraph Page 583 BOATS AND SMALL CRAFT ............................. 583-1 SECTION 1. ADMINISTRATIVE POLICIES ............................ 583-1 583-1.1 BOATS AND SMALL CRAFT .............................. 583-1 583-1.1.1 DEFINITION OF A NAVY BOAT. ....................... 583-1 583-1.2 CORRESPONDENCE ................................... 583-1 583-1.2.1 BOAT CORRESPONDENCE. .......................... 583-1 583-1.3 STANDARD ALLOWANCE OF BOATS ........................ 583-1 583-1.3.1 CNO AND PEO CLA (PMS 325) ESTABLISHED BOAT LIST. ....... 583-1 583-1.3.2 CHANGES IN BOAT ALLOWANCE. ..................... 583-1 583-1.3.3 BOATS ASSIGNED TO FLAGS AND COMMANDS. ............ 583-1 583-1.3.4 HOW BOATS ARE OBTAINED. ........................ 583-1 583-1.3.5 EMERGENCY ISSUES. ............................. 583-2 583-1.4 TRANSFER OF BOATS ................................. 583-2 583-1.4.1 PEO CLA (PMS 325) AUTHORITY FOR TRANSFER OF BOATS. .... 583-2 583-1.4.2 TRANSFERRED WITH A FLAG. ....................... 583-2 583-1.4.3 TRANSFERS TO SPECIAL PROJECTS AND TEMPORARY LOANS. 583-2 583-1.4.3.1 Project Funded by Other Activities. ................ 583-5 583-1.4.3.2 Cost Estimates. ............................ 583-5 583-1.4.3.3 Funding Identification. -
Course Objectives Chapter 2 2. Hull Form and Geometry
COURSE OBJECTIVES CHAPTER 2 2. HULL FORM AND GEOMETRY 1. Be familiar with ship classifications 2. Explain the difference between aerostatic, hydrostatic, and hydrodynamic support 3. Be familiar with the following types of marine vehicles: displacement ships, catamarans, planing vessels, hydrofoil, hovercraft, SWATH, and submarines 4. Learn Archimedes’ Principle in qualitative and mathematical form 5. Calculate problems using Archimedes’ Principle 6. Read, interpret, and relate the Body Plan, Half-Breadth Plan, and Sheer Plan and identify the lines for each plan 7. Relate the information in a ship's lines plan to a Table of Offsets 8. Be familiar with the following hull form terminology: a. After Perpendicular (AP), Forward Perpendiculars (FP), and midships, b. Length Between Perpendiculars (LPP or LBP) and Length Overall (LOA) c. Keel (K), Depth (D), Draft (T), Mean Draft (Tm), Freeboard and Beam (B) d. Flare, Tumble home and Camber e. Centerline, Baseline and Offset 9. Define and compare the relationship between “centroid” and “center of mass” 10. State the significance and physical location of the center of buoyancy (B) and center of flotation (F); locate these points using LCB, VCB, TCB, TCF, and LCF st 11. Use Simpson’s 1 Rule to calculate the following (given a Table of Offsets): a. Waterplane Area (Awp or WPA) b. Sectional Area (Asect) c. Submerged Volume (∇S) d. Longitudinal Center of Flotation (LCF) 12. Read and use a ship's Curves of Form to find hydrostatic properties and be knowledgeable about each of the properties on the Curves of Form 13. Calculate trim given Taft and Tfwd and understand its physical meaning i 2.1 Introduction to Ships and Naval Engineering Ships are the single most expensive product a nation produces for defense, commerce, research, or nearly any other function. -

RS Tera and Thank You for Choosing an RS Product
Rigging Manual V1 PLEASE FOLLOW RIGGING MANUAL IN THE CORRECT ORDER Contents 1. Introduction......................................................... 1 2. Technical data.................................................... 2 3. Commissioning................................................. 3 - 20 3.1 - Preparation.............................................................. 4 3.2 - Unpacking................................................................ 4 3.3 - Pack contents.......................................................... 4 - 5 3.4 - Adding the toestraps ................................................ 6 - 7 3.5 - Adding the toestrap elastic ...................................... 7 3.6 - Adding the rope handles .......................................... 8 3.7 - Adding the rear strop ............................................... 9 3.8 - Adding the bung ....................................................... 9 3.9 - Adding the righting lines .......................................... 10 3.10 - Adding ther painter ................................................ 10 3.11 - Rigging the mast .................................................... 11 - 12 3.12 - Stepping the mast .................................................. 12 3.13 - Rigging the boom ................................................... 13 - 17 3.14 - Rudder and daggerboard ...................................... 18 - 20 4. Sailing hints........................................................... 21 - 26 4.1 - Introduction.............................................................. -

Soil Sampling Kit EARTH DRILLS & AUGERS P.O
LITTLE BEAVER SSK-1 Soil Sampling Kit EARTH DRILLS & AUGERS P.O. Box 840 Livingston, TX 77351 936-327-3121 ph * 936-327-4025 fax 1-800-227-7515 “Little Beaver How-To Series” Basic Drilling Instructions with Soil Sampling Kit DANGER: Never dig where there is a possibility of underground power lines or other hazards. Electrocution or serious bodily injury may result. Before you dig, call your local one-call agency. DANGER: Keep the machine and drilling tools away from overhead electric wires and devices. Electrocution can occur without direct contact. Failure to keep away will result in serious injury and/or death. CAUTION: Read and understand all operator’s manuals for equipment being used before operating. These “Operating Instructions” are to be used as a supplemental aid, not replacement, with the Big Beaver Operator’s Manual. Page 2 For Further Inquires Call: 1-800-227-7515 SETUP PROCEDURE: 3 Attach front legs to tower with pins. 1 Remove tower pins from stored position. Attach pul- Pivot tower up and secure ley, with rope installed, to tower. 2 with tower pins. 4 Extend back stay, pin, and 5 Extend front legs, pin, and se- 6 Be sure all chains are taut for secure with chain as described cure with chain. maximum stability. Base will in the Big Beaver Operator’s Man- be raised slightly. ual. 8 Secure the drill frame by driv- ing stakes through the holes on both sides of the frame. 7 Level the drill mast by ad- CAUTION: Be sure cat- 9 Attach torque tube and justing leveling screw, head valve is not engaged during hydraulic power source chains and/or pins for the front start-up. -

Forces on the Ship
2 FORCES ON THE SHIP --~o-- T TSS Mason (DOG 87) had just secured from special sea and anchor U detail after tying up alongside the pier in its home port of Norfolk, and the ship's officers had assembled in the wardroom. To get the most training benefit from each shiphandling opportunity it was the cap tain's policy to have a brief hot wash-up meeting after each significant evolution. chaired by the officer who had the conn. Today's meeting was chaired by Lt fjg) Roger Kingsbury. "Let's get started," said the commanding officer, Cdr. Welsh Jones. " Roger. how did you think it went?" "I screwed it up skipper.· replied a somewhat embarrassed lieu tenant (jg) Kingsbury. "Don't worry about it," said Commander Jones. "Nothing got bent. and we always learn more from our mistakes than from things that go perfectly. What do you think went wrong today?" "I think l understand it now. I failed to properly anticipate the effect the current would have on us. I knew that with a strong ebb tide we would have a current setting us to port. Since we were going starboard side to, I planned to make a close approach to compensate for the cur rent. What l didn't anticipate was that as we entered the slip the cur rent would no longer work on the bow but would continue to push our stern to port. That rotated our bow to starboard and brought us in closer to the pier than I intended. If it hadn't been for the tug we had made up on the port bow, we could have been in real trouble.