2012 Valid List Sorted by Base Handicap
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The 46Th Annual
the 46th Annual 2018 TO BENEFIT NANTUCKET COMMUNITY SAILING PROUD TO SPONSOR MURRAY’S TOGGERY SHOP 62 MAIN STREET | 800-368-3134 2 STRAIGHT WHARF | 508-325-9600 1-800-892-4982 2018 elcome to the 15th Nantucket Race Week and the 46th Opera House Cup Regatta brought to you by Nantucket WCommunity Sailing, the Nantucket Yacht Club and the Great Harbor Yacht Club. We are happy to have you with us for an unparalleled week of competitive sailing for all ages and abilities, complemented by a full schedule of awards ceremonies and social events. We look forward to sharing the beauty of Nantucket and her waters with you. Thank you for coming! This program celebrates the winners and participants from last year’s Nantucket Race Week and the Opera House Cup Regatta and gives you everything you need to know about this year’s racing and social events. We are excited to welcome all sailors in the Nantucket community to join us for our inaugural Harbor Rendezvous on Sunday, August 12th. We are also pleased to welcome all our competitors, including young Opti and 420 racers; lasers, Hobies and kite boarders; the local one design fleets; the IOD Celebrity Invitational guest tacticians and amateur teams; and the big boat regatta competitors ranging from Alerions and Wianno Seniors to schooners and majestic classic yachts. Don’t forget that you can go aboard and admire some of these beautiful classics up close, when they will be on display to the public for the 5th Classic Yacht Exhibition on Saturday, August 18th. -

Catalina 22 - an All-Around Champion
Catalina 22 - An All-Around Champion A 40 year history of the Builder, the Class, and the People who Love This Boat! 1969 - 2009 Prepared by Rich Fox Catalina 22 National Sailing Association First Release - November 2009 MILESTONE YEARS OF THE CATALINA 22 July 1969 The Catalina 22 is built in North Hollywood, California. Frank Butler hopes to build 100 boats if all goes well. August 1972 A Catalina 22 Race is held in California and is tagged by Frank Butler as the “Catalina 22 Nationals”. The Catalina 22 National Sailing Association is formed. February 1975 Hull number 5000 is built. February 1980 SAIL Magazine names the Catalina 22 as “Trailerable Boat of the Decade”. September 1980 Hull number 10,000 is built. The Catalina 22 is built in plants in California, Florida, England, Australia and Canada. 1985 The Catalina 22 “New Design” is introduced for the 1986 model year. February 1990 Hull number 15,000 is built. January 1995 The Catalina 22 MkII is introduced, beginning with hull number 15,348, and features an enlarged deck, transom and interior. February 1995 The Catalina 22 is named as one of the five charter members to the Sailboat Hall of Fame. Fall 2001 The Catalina 22 National Sailing Association approaches Frank Butler about building a new Catalina 22 that more closely matches the design of the original Catalina 22. June 2004 The Catalina 22 Sport is built, beginning with hull number 15,540. The Sport and MkII models are manufactured in Woodland Hills, California. July 2009 The Catalina 22 MkII and Sport remain in production 40 years later with relocation of manufacturing facilities to Largo, Florida. -
Autonomous Sailing Boats
Department of Computer Sciences Autonomous Sailing Boats Seminar aus Informatik (SS 2011) Eingereicht von: Christian Alt (0721203), [email protected] Natalie Wittinghofer (0620614), [email protected] Angefertigt am: Institut of Computer Science Salzburg Betreuung: Univ.-Prof. Dipl.-Ing. Dr.techn. Wolfgang Pree Salzburg, Juni 2011 CONTENTS I Contents 1 Introduction 1 2 Applications for autonomous sail boats 2 3 Hardware 3 3.1 Boats . .3 3.2 Sails . .4 3.3 Microcontroller and Sensors . .5 4 Software Architecture 8 4.1 Top-down planner based Model . .8 4.2 Bottom-up reactive system . .9 4.3 Hybrid architecture . .9 5 Communication 11 6 Control System 14 6.1 Control System by Abril and Salom [4] . 14 6.2 Control System by Stelzer et al. [18] . 15 7 Collision Avoidance 18 7.1 A Reactive Approach to Collision Avoidance . 18 7.2 A Raycast Approach to Collision Avoidance . 20 8 Simulation and testing 22 9 Conclusion 23 1 INTRODUCTION 1 1 Introduction Over the past decade there has been intense scientific work on autonomous sailing boats. As hardware gets smaller, cheaper and also better performing the possibilities increase for autonomous vessels. Recently there is a lot of research going on with the aim of reducing CO2 emissions. Au- tonomous sailing boats fit perfectly into these ambitions. Challenges of Autonomous Sailing Boats Building and programming an autonomous sailing boat holds several challenges: • Hardware challenges: Equipping a robotic sailing boat with microcontroller, sen- sors, actuators and other special hardware needed (e.g. solar panels) is very difficult. -
Convergent Evolution of Boats with Sails A
www.nature.com/scientificreports OPEN Convergent Evolution of Boats with Sails A. Bejan1*, L. Ferber2 & S. Lorente3 This article unveils the geometric characteristics of boats with sails of many sizes, covering the range 102–105 kg. Data from one hundred boat models are collected and tabulated. The data show distinct trends of convergent evolution across the entire range of sizes, namely: (i) the proportionality between beam and draft, (ii) the proportionality between overall boat length and beam, and (iii) the proportionality between mast height and overall boat length. The review shows that the geometric aspect ratios (i)–(iii) are predictable from the physics of evolution toward architectures that ofer greater fow access through the medium. Nature impresses us with images, changes and tendencies that repeat themselves innumerable times even though “similar observations” are not identical to each other. In science, we recognize each ubiquitous tendency as a distinct phenomenon. Over the centuries, our predecessors have summarized each distinct phenomenon with its own law of physics, which then serves as a ‘frst principle’ in the edifce of science. A principle is a ‘frst principle’ when it cannot be deduced from other frst principles. Tis aspect of organization in science is illustrated by the evolution of thermodynamics to its current state1,2. For example, 150 years ago the transformation of potential energy into kinetic energy and the conservation of “caloric” were fused into one statement—the frst law of thermodynamics—which now serves as a frst-principle in physics. It was the same with another distinct tendency in nature: everything fows (by itself) from high to low. -
PHRF MASTER PHRF Master Nov 2017.Xlsx 2/15/18
Sail BoatName BoatType Skipper Club PHRF 276 CORSAIR 31-1D Kersey, Bo AYC -51 215 TRIBOLOGY F31 HORTON, P Casey, D -21 24 LAGNIAPPE F25C HOWARD,J AYC 9 80x F28 AYC 15 60 ARANA de AGUA F28R MAKI,V. AYC 15 163 CHECKMATE STILETTO 23 BUCK,P. AYC 15 1x LADY LEE STILETTO 27 STEVENS,R. AYC 21 22x Corsair 750 Kuc, J AYC 36 356 TRYST F27 AGEE,R AYC 60 246x Warrior 11 Metre Henrickson, James AYC 69 3580 Voodoo Beneteau First 35 BARLOW, ROBERT AYC 78 25527 ZEN 2 BENETEAU First 36.7 BOGGUS,W AYC 78 105-1 J 105 J/105 LEMMONS, K 78 307J J/105 SPURLIN,S AYC 78 675 J/105 LEMONS, KEN AYC 84 1051 Xcitation J/105 Lemons,K AYC 84 30J J/92 SPURLIN, S AYC 90 7 DUTCH COMFORT X-TREME 25 MARSH, PETER AYC 90 J/100 McDonald, Bruce AYC 93 178 COYOTE MELGES 24 ROCHARD,E. AYC 93 22 DANGEROUSLY VIPER 640 SIRCELY, JOE 96 601 VIPER 640 PAYET,FELIPE AYC 96 180 OBESSION OLSON EDWARDS,J. AYC 99 8143 OLSON 30 NEWMAN,J AYC 99 22586 LOWRIDER OLSON 30 COBB,G. AYC 99 149O BLOWN ASSETS OLSON 30 SMITH,T. AYC 99 MISTRAL ELITE 37 CUSHING, DORAN AYC 102 103 THE STIG VIPER 640 PAYET, FELIPE AYC 102 102x ANIMAL VIPER 640 JONES, JEFF & CARRIE AYC 102 42V GIDDY UP VIPER 640 VLANDINGHM AYC 105 31198x Red Sky C&C 37 PETERSON, BAY AYC 108 145 GODZILLA J/29 Tillinghast, J AYC 108 149 IMAGINE J/29 MEYERS,R Romberg, M. -

2010 Year Book
2010 YEAR BOOK www.massbaysailing.org $5.00 HILL & LOWDEN, INC. YACHT SALES & BROKERAGE J boat dealer for Massachusetts and southern new hampshire Hill & Lowden, Inc. offers the full range of new J Boat performance sailing yachts. We also have numerous pre-owned brokerage listings, including quality cruising sailboats, racing sailboats, and a variety of powerboats ranging from runabouts to luxury cabin cruisers. Whether you are a sailor or power boater, we will help you find the boat of your dreams and/or expedite the sale of your current vessel. We look forward to working with you. HILL & LOWDEN, INC. IS CONTINUOUSLY SEEKING PRE-OWNED YACHT LISTINGS. GIVE US A CALL SO WE CAN DISCUSS THE SALE OF YOUR BOAT www.Hilllowden.com 6 Cliff Street, Marblehead, MA 01945 Phone: 781-631-3313 Fax: 781-631-3533 Table of Contents ______________________________________________________________________ INFORMATION Letter to Skippers ……………………………………………………. 1 2009 Offshore Racing Schedule ……………………………………………………. 2 2009 Officers and Executive Committee …………… ……………............... 3 2009 Mass Bay Sailing Delegates …………………………………………………. 4 Event Sponsoring Organizations ………………………………………................... 5 2009 Season Championship ………………………………………………………. 6 2009 Pursuit race Championship ……………………………………………………. 7 Salem Bay PHRF Grand Slam Series …………………………………………….. 8 PHRF Marblehead Qualifiers ……………………………………………………….. 9 2009 J105 Mass Bay Championship Series ………………………………………… 10 PHRF EVENTS Constitution YC Wednesday Evening Races ……………………………………….. 11 BYC Wednesday Evening -

Current CRA Membership and Boat Roster
BOUY RLC MBR FIRST NAME LAST NAME SAIL NUMBER BOAT NAME BOAT TYPE BOAT LOCATION RATING RATING MBR # TYPE Brad Alberts 46307 El Sueño Beneteau First 47.7 Sunroad Marina 21 18 41 REG Sarah Alexander 745 ASSOC Brett Allen 30231 Vamos Olson 30 SWYC 96 96 623 ASSOC John Allington 743 ASSOC Randy Ames 77394 Liberty Schumacher 30 SWYC 135 / 135 / 174 REG Lawrence Andrews 69933 Too Loco ex Ripple Riptide 35 Southwestern 40 30 778 REG Tyler Babcock 56046 Playa Grande Beneteau 40.7 SDYC 54 54 571 REG Dave Baer 57789 Casamar Catalina 30 SWYC 198 198 38 REG Thomas Barker 60010 GoodCall Swan 60 Kona Kia 108 REG David Basham 3017 Cimarron Ericson 35-II A4/O5 147 144 103 REG Ivan Batanov USA7219 Zero Gravity Soto 40 Shelter Island Boatyard -3 -9 451 REG Tony Beale USA 52 Scotch Bonnet Melges 24 90 75 130 REG Drew Belk 60486 Precepts II Beneteau First 40 Sunroads Marina 15 15 786 REG Julie Bendig 434 ASSOC Christopher Bennett 42733 Maleficent Beneteau First 42s7 Bay Club Marina 78 72 56 REG Scott Bennett 87268 Blind Squirrel (1/2 Partner) WD Schock/Santana 30/30 GP/30' Harbor Island West 628 120 120 588 REG Mark Berdan 23 UnEven KEEL Farrier/ F82r/ 27' Silver Gate Yacht Club 51 51 483 REG Robert Berkley USA60671 Charisma Grand Soleil 45/45 B91 Sun Harbor Marina 81 75 454 REG Peter Blake 56403 Rio del Mar Catalina 34 SWYC 153 153 88 REG Brian Bohan 77250 Flying Colors Islander 30 Kona Kai 180 180 303 ASSOC Chuck Bowers 32217 Rhumb Runner J Boats / J-29 AC Harbor F3 111 111 539 REG Joe Braun 87879 Shaman Schock Oceanside 72 72 802 REG Michael Brawner 7926 Zarafa Leonardo Yachts BV Eagle 44 43'9 SDYC F-57 81 75 511 REG james bryant 56984 Nui Uli Uli Hanse 540e/52.76 ft. -
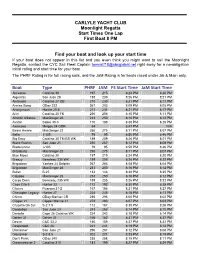
Boat Type PHRF JAM FS Start Time Jam Start Time
CARLYLE YACHT CLUB Moonlight Regatta Start Times One Lap First Boat 8 PM Find your boat and look up your start time If your boat does not appear in this list and you even think you might want to sail the Moonlight Regatta, contact the CYC Sail Fleet Captain [email protected] right away for a no-obligation initial rating and start time for your boat. The PHRF Rating is for full racing sails, and the JaM Rating is for boats raced under Jib & Main only. Boat Type PHRF JAM FS Start Time JaM Start Time Akcestas Catalina 30 197 215 8:24 PM 8:20 PM Algeciras San Juan 28 188 209 8:26 PM 8:21 PM Ambrosia Catalina 27 OB 210 230 8:21 PM 8:17 PM Annies Song ODay 222 267 283 8:09 PM 8:05 PM Anonymous Hunter 25.5 211 231 8:21 PM 8:17 PM Ariel Catalina 25 FK 236 256 8:15 PM 8:11 PM Atlantic Alliance MacGregor 26 233 250 8:16 PM 8:12 PM Avatar Sabre 30-3 170 189 8:30 PM 8:26 PM Axomoxa Melges 24 ODR 94 8:47 PM N/A Beare Amare MacGregor 22 255 275 8:11 PM 8:07 PM Bella J-105 79 95 8:50 PM 8:46 PM Big Easy Catalina 30 TM BS WK 189 209 8:26 PM 8:21 PM Black Rushin San Juan 21 250 267 8:12 PM 8:08 PM Bladerunner J-105 79 95 8:50 PM 8:46 PM Blitzeburg MacGregor 22 255 275 8:11 PM 8:07 PM Blue Moon Catalina 30 197 215 8:24 PM 8:20 PM Breezy Beneteau 235 WK 189 205 8:26 PM 8:22 PM Brigadoon Yankee 24 Dolphin 267 286 8:08 PM 8:04 PM Brigadoon MacGregor 26 233 250 8:16 PM 8:12 PM Bullet B-25 133 148 8:38 PM 8:35 PM Calypso MacGregor 26 233 250 8:16 PM 8:12 PM Carpe Diem Beneteau 235 WK 189 205 8:26 PM 8:22 PM Casa Cita II Hunter 33 172 192 8:30 PM 8:25 -

Ranking 2019 Po Zaliczeniu 182 Dyscyplin
RANKING 2019 PO ZALICZENIU 182 DYSCYPLIN OCENA PKT. ZŁ. SR. BR. SPORTS BEST 1. Rosja 384.5 2370 350 317 336 111 33 2. USA 372.5 2094 327 252 282 107 22 3. Niemcy 284.5 1573 227 208 251 105 17 4. Francja 274.5 1486 216 192 238 99 15 5. Włochy 228.0 1204 158 189 194 96 10 6. Wielka Brytania / Anglia 185.5 915 117 130 187 81 5 7. Chiny 177.5 1109 184 122 129 60 6 8. Japonia 168.5 918 135 135 108 69 8 9. Polska 150.5 800 103 126 136 76 6 10. Hiszpania 146.5 663 84 109 109 75 6 11. Australia 144.5 719 108 98 91 63 3 12. Holandia 138.5 664 100 84 96 57 4 13. Czechy 129.5 727 101 114 95 64 3 14. Szwecja 123.5 576 79 87 86 73 3 15. Ukraina 108.0 577 78 82 101 52 1 16. Kanada 108.0 462 57 68 98 67 2 17. Norwegia 98.5 556 88 66 72 42 5 18. Szwajcaria 98.0 481 66 64 89 59 3 19. Brazylia 95.5 413 56 63 64 56 3 20. Węgry 89.0 440 70 54 52 50 3 21. Korea Płd. 80.0 411 61 53 61 38 3 22. Austria 78.5 393 47 61 83 52 2 23. Finlandia 61.0 247 30 41 51 53 3 24. Nowa Zelandia 60.0 261 39 35 35 34 3 25. Słowenia 54.0 278 43 38 30 29 1 26. -

Mylne Classic Regatta 2009 12Th—16Th July OFFICIAL PROGRAMME
£10 M 1896 Mylne Classic Regatta 2009 12th—16th July OFFICIAL PROGRAMME M 1896 1 8th June 2009 Thank you for your letter dated the 2nd June concerning the Mylne Classic Regatta which The Princess Royal has read with interest. As Patron of Royal Northern and Clyde Yacht Club, Her Royal Highness sends all concerned with the Mylne Classic Regatta in July her best wishes for a successful event. The Princess was particularly interested to read about George Lennox Watson’s work with the design of Britannia and that Alfred Mylne kept the rigging up to date. Her Royal Highness fully supports your work in reviving the interest in Alfred Mylne and sends all concerned with the Classic Regatta her best wishes. Captain Nick Wright, LVO, Royal Navy Private Secretary to HRH The Princess Royal Ms. Margaret Lobley M 1896 2 Contents Introduction ............................................................ 5 Event Information ............................................. 6 - 7 Regatta Course & Destination Details.............. 8 - 9 The Mylne Dynasty .........................................10 - 11 The Regatta Fleet ........................................... 12 - 22 Messages of Support ...................................... 23 - 25 Mylne Yachts Around The World ................. 26 - 27 The Chicane Restoration ...............................30 - 31 Lady Trix - The First 100 Years ............................. 32 Acknowledgements ............................................... 40 The Mylne Design List ....................................41 - 49 M 1896 3 Introduction am delighted to welcome you to the Mylne Classic Regatta 2009, celebrating the I world renowned yacht design heritage of A.Mylne & Co and its founder Alfred Mylne. This event is the first time owners of Mylne yachts (and selected guests) have gathered together under the Mylne flag. There are five days of celebrations based around Rhu and Rothesay to give owners, crews and enthusiasts lots of opportunity to mingle and admire the assembled yachts. -
Journal of the of Association Yachting Historians
Journal of the Association of Yachting Historians www.yachtinghistorians.org 2019-2020 The Jeremy Lines Access to research sources At our last AGM, one of our members asked Half-Model Collection how can our Association help members find sources of yachting history publications, archives and records? Such assistance should be a key service to our members and therefore we are instigating access through a special link on the AYH website. Many of us will have started research in yacht club records and club libraries, which are often haphazard and incomplete. We have now started the process of listing significant yachting research resources with their locations, distinctive features, and comments on how accessible they are, and we invite our members to tell us about their Half-model of Peggy Bawn, G.L. Watson’s 1894 “fast cruiser”. experiences of using these resources. Some of the Model built by David Spy of Tayinloan, Argyllshire sources described, of course, are historic and often not actively acquiring new material, but the Bartlett Over many years our friend and AYH Committee Library (Falmouth) and the Classic Boat Museum Member the late Jeremy Lines assiduously recorded (Cowes) are frequently adding to their specific yachting history collections. half-models of yachts and collected these in a database. Such models, often seen screwed to yacht clubhouse This list makes no claim to be comprehensive, and we have taken a decision not to include major walls, may be only quaint decoration to present-day national libraries, such as British, Scottish, Welsh, members of our Association, but these carefully crafted Trinity College (Dublin), Bodleian (Oxford), models are primary historical artefacts. -

Valid List by Design
Date: 10/19/2012 2012 Valid List by Design, Adjustments Page 1 of 31 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap. Design Last Name Yacht Name Record Date Base LP Adj Spin Rig Prop Rec Misc Race Cruise 1 D35 Schimenti Zefiro Toma R043012 36 -9 -3 24 42 12 Metre Gregory Valiant R071212 3 +6 9 9 12 Metre Mc Millen 111 Onawa R011512 33 -6 27 33 5.5 Carney Lyric R082912 156 u156 u165 8 Metre Palm Quest N071612 111 111 117 Aerodyne 38 D' Alessandro Alexis R053112 39 39 48 Akilaria Class 40 Davis Amhas R072312 -9 -9 -3 Akilaria Class 40 Dreese Toothface R041012 -9 -9 0 Alben 54 Ketch Wiseman Legacy V R070212 57 +6 +6 69 78 Alberg 35 Prefontaine Helios R042312 201 -3 198 210 Alberg 37 Mintz L' Amarre R061612 156 +6 +3 +6 171 186 Albin Cumulus Droste Cumulus 3 R030412 189 189 204 Albin Nimbus 42 Pomfret Anne R052212 99 99 111 Alden 42 S D S M Vieira Cadence R011312 120 +6 +6 132 144 Alden 44 Rice Pilgrim N053112 111 +9 +6 126 141 Alden 44 Weisman Nostos R011312 111 +9 +6 126 132 Alden 45 Davin Querence R071912 87 +9 +6 102 108 Alden 45" Seagoer Dunne Cygnet N040212 141 141 147 Alerion 26 Lurie Mischief R040612 225 U225 U231 Alerion Express 28 Brown Lumen Solare C082212