Autonomous Sailing Boats
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2012 Valid List Sorted by Base Handicap
Date: 10/19/2012 2012 Valid List Sorted by Base Handicap Page 1 of 30 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap Yacht Design Last Name First Name Yacht Name Fleet Date Sail Number Base Racing Cruising R P 90 David George Rambler NEW2 R021912 25556 -171 -171 -156 J/V I R C 66 Meyers Daniel Numbers MHD2 R012912 119 -132 -132 -120 C T M 66 Carlson Gustav Aurora NEW2 N081412 50095 -99 -99 -90 I R C 52 Fragomen Austin Interlodge SMV2 N072412 5210 -84 -84 -72 T P 52 Swartz James Vesper SMV2 C071912 52007 -84 -87 -72 Farr 50 O' Hanley Ron Privateer NEW2 N072412 50009 -81 -81 -72 Andrews 68 Burke Arthur D Shindig NBD2 R060412 55655 -75 -75 -66 Chantier Naval Goldsmith Mat Sejaa NEW2 N042712 03 -75 -75 -63 Ker 55 Damelio Michael Denali MHD2 R031912 55 -72 -72 -60 Maxi Kiefer Charles Nirvana MHD2 R041812 32323 -72 -72 -60 Tripp 65 Academy Mass Maritime Prevail MRN2 N032212 62408 -72 -72 -60 Custom Schotte Richard Isobel GOM2 R062712 60295 -69 -69 -57 Custom Anderson Ed Angel NEW2 R020312 CAY-2 -57 -51 -36 Merlen 49 Hill Hammett Defiance NEW2 N020812 IVB 4915 -42 -42 -30 Swan 62 Tharp Twanette Glisse SMV2 N071912 -24 -18 -6 Open Class 50 Harris Joseph Gryphon Soloz NBD2 -

Valid List by Design
Date: 10/19/2012 2012 Valid List by Design, Adjustments Page 1 of 31 This Valid List is to be used to verify an individual boat's handicap, and valid date, and should not be used to establish handicaps for any other boats not listed. Please review the appilication form, handicap adjustments, boat variants and modified boat list reports to understand the many factors including the fleet handicapper observations that are considered by the handicap committee in establishing a boat's handicap. Design Last Name Yacht Name Record Date Base LP Adj Spin Rig Prop Rec Misc Race Cruise 1 D35 Schimenti Zefiro Toma R043012 36 -9 -3 24 42 12 Metre Gregory Valiant R071212 3 +6 9 9 12 Metre Mc Millen 111 Onawa R011512 33 -6 27 33 5.5 Carney Lyric R082912 156 u156 u165 8 Metre Palm Quest N071612 111 111 117 Aerodyne 38 D' Alessandro Alexis R053112 39 39 48 Akilaria Class 40 Davis Amhas R072312 -9 -9 -3 Akilaria Class 40 Dreese Toothface R041012 -9 -9 0 Alben 54 Ketch Wiseman Legacy V R070212 57 +6 +6 69 78 Alberg 35 Prefontaine Helios R042312 201 -3 198 210 Alberg 37 Mintz L' Amarre R061612 156 +6 +3 +6 171 186 Albin Cumulus Droste Cumulus 3 R030412 189 189 204 Albin Nimbus 42 Pomfret Anne R052212 99 99 111 Alden 42 S D S M Vieira Cadence R011312 120 +6 +6 132 144 Alden 44 Rice Pilgrim N053112 111 +9 +6 126 141 Alden 44 Weisman Nostos R011312 111 +9 +6 126 132 Alden 45 Davin Querence R071912 87 +9 +6 102 108 Alden 45" Seagoer Dunne Cygnet N040212 141 141 147 Alerion 26 Lurie Mischief R040612 225 U225 U231 Alerion Express 28 Brown Lumen Solare C082212 -

Grumman G-21 / Jrf / Oa-9 Goose
Last updated 10 February 2020 |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| GRUMMAN G-21 / JRF / OA-9 GOOSE |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| Grumman JRF-5 Goose N2721A (c/n B-54) at Sydney-Bankstown in November 1974. Photo by Chris O’Neill First flown at Grumman’s newly established plant at Bethpage NY on 29 May 1937, the Goose proved to be an outstanding aircraft in both civil and military use. All models were built with variants of the 450hp P&W R-985 Wasp Junior engines. Goose production totalled 345 aircraft, ending in October 1945 at Bethpage. After WWII, military disposals Gooses were in high demand. After civil certification they were put to work in a wide variety of demanding roles, from hauling freight down the Aleutian island chain in Alaska, carrying holiday makers from Los Angeles area to Catalina Island 26 miles across the Bay in the words of a popular 1950s hit song. Others flew as executive machines, carring captains of industry to remote lakes for hunting and fishing. Numerous maintenance companies offered Goose modifications to improve performance or extend airframe life. Prominent among these was McKinnon Enterprises Inc at Sandy, Oregon, which marketed a range of upgrades, including turboprop engines. McKinnon models are detailed at the end of this listing. Much additional information included below thanks to the highly-recommended Air Britain book “The Grumman Amphibians” by Fred J. Knight with Colin R.Smith. ______________________________________________________________________________________ 1001 G-21 NX16910 Grumman Aircraft Engineering Corp, Bethpage NY29.5.37 G-21A (ff Bethpage NY 29.5.37) NC16910 Wilton Lloyd-Smith & Marshall Field III, New York NY: del. -

0216 World News
® ® Vol. 29, No. 8 February 2016 | Section A Where the news is always good! OUR WORLD Saturday morning, even if it is just for the COMMUNITY Meet Vendors, Get free candy and treats. NEWS & UPDATE Last year, more than 1,300 people lled the aisles at Circle Square Cultural Center By Kenneth D. Colen Ideas & Adopt a Pet to meet with companies selling granite Publisher countertops, screen enclosures, air con- By Robert Colen ditioning systems and much more. Even local television news from Gainesville Fiscal 2016 Operating Get ready for On Top of the World’s at Circle Square Cultural Center for you to showed up to cover the event. Budget 9th annual Home Improvement Expo! meet with, learn from, and potentially do Of course, On Top of the World’s re- On Saturday, Feb. 13, vendors from all business with. is fun and energy lled modeling company, World Home Im- On Top of the World (Central) Own- types of home improvement trades will be event is an entertaining way to spend a provements will be in the rst row to show ers, remember, Wednesday, Feb. 17, bud- you all the great projects they have done get meeting is right around the corner. and, if you are interested, what they can e proposed budget was mailed out in do for you. A±er a brief hiatus to focus on late January. is coming scal year will new construction, World Home Improve- have considerable challenges. Your board ments is re-energized and ready to once is pleased to report that despite signicant again provide residents the high quality work being done around the commu- construction they deserve. -

Sea History Index Issues 1-164
SEA HISTORY INDEX ISSUES 1-164 Page numbers in italics refer to illustrations Numbers 9/11 terrorist attacks, 99:2, 99:12–13, 99:34, 102:6, 103:5 “The 38th Voyagers: Sailing a 19th-Century Whaler in the 21st Century,” 148:34–35 40+ Fishing Boat Association, 100:42 “100 Years of Shipping through the Isthmus of Panama,” 148:12–16 “100th Anniversary to Be Observed Aboard Delta Queen,” 53:36 “103 and Still Steaming!” 20:15 “1934: A New Deal for Artists,” 128:22–25 “1987 Mystic International,” 46:26–28 “1992—Year of the Ship,” 60:9 A A. B. Johnson (four-masted schooner), 12:14 A. D. Huff (Canadian freighter), 26:3 A. F. Coats, 38:47 A. J. Fuller (American Downeaster), 71:12, 72:22, 81:42, 82:6, 155:21 A. J. McAllister (tugboat), 25:28 A. J. Meerwald (fishing/oyster schooner), 70:39, 70:39, 76:36, 77:41, 92:12, 92:13, 92:14 A. S. Parker (schooner), 77:28–29, 77:29–30 A. Sewall & Co., 145:4 A. T. Gifford (schooner), 123:19–20 “…A Very Pleasant Place to Build a Towne On,” 37:47 Aalund, Suzy (artist), 21:38 Aase, Sigurd, 157:23 Abandoned Shipwreck Act of 1987, 39:7, 41:4, 42:4, 46:44, 51:6–7, 52:8–9, 56:34–35, 68:14, 68:16, 69:4, 82:38, 153:18 Abbass, D. K. (Kathy), 55:4, 63:8, 91:5 Abbott, Amy, 49:30 Abbott, Lemuel Francis (artist), 110:0 ABCD cruisers, 103:10 Abel, Christina “Sailors’ Snug Harbor,” 125:22–25 Abel Tasman (ex-Bonaire) (former barquentine), 3:4, 3:5, 3:5, 11:7, 12:28, 45:34, 83:53 Abele, Mannert, 117:41 Aberdeen, SS (steamship), 158:30, 158:30, 158:32 Aberdeen Maritime Museum, 33:32 Abnaki (tugboat), 37:4 Abner Coburn, 123:30 “Aboard -

Naval Architectural Drawings Folded Blueprints, Boxes 1-10
Los Angeles Maritime Museum Research Library Papers of Fellows and Stewart, Inc. Series 5, Part 2: Naval Architectural Drawings Folded blueprints, boxes 1-10. Original plans and drawings on tracing paper, vellum or linen are described in Part 1. Series 5, Part 2: Folded plans are stored in boxes 1-10. Most vessels in the collection are represented by incomplete plan sets. A summary provided below lists the types of vessels for which blueprint copies are available for viewing. For original plans see Series 5: Part 1. Boxed-Folded plans (blueprints or diazo prints only) Box # vessel type FS01-S5 fishing boats, launches, rescue boats FS02-S5 power cruisers, sailboats, yachts FS03-S5 cutters, commuters, motorboats, rescue boats FS04-S5 cruisers, patrol boats, gunboats FS05-S5 cargo vessels, cruisers, personnel boats, fishing boats, barges, launches, tenders, sport fishing boats, taxi boats, tenders, tugs FS06-S5 cruisers, fishing boats, ketches, patrol boats, 45’ picket boats, ferry boats FS07-S5 launches, cruisers, boatyards, boat shops, glass-bottomed boats FS08-S5 sailboats, yachts, motor-yachts FS09-S5 power cruisers, sailboats, yachts FS10-S5 power cruisers, sailboats, yachts SERIES Vessel Title Block / / BOX # typefldr # Lines Descr. Date Scale Media Size Creator/Publisher 72' x 15' Yacht Designed for FS01- Mr. J.D. blue- Fellows and S5 1 yacht Fredericks 06/11/1929 none print 26" x 18" Stewart 72' x 15' Yacht Designed for FS01- Mr. J.D. 1/4"=1'- blue- Fellows and S5 1 yacht Fredericks 06/11/1929 0" print 14" x 25" Stewart 25' x 7'-4" yacht designed for FS01- the City of Los blue- Fellows and S5 2 yacht Angeles 01/18/1929 1"=1'-0" print 36" x 16" Stewart 25' x 7'-4" yacht designed for FS01- the City of Los blue- Fellows and S5 2 yacht Angeles 01/18/1929 1"=1'-0" print 36" x 16" Stewart 28' x 7'-6" runabout FS01- runabo designed for 3/4"=1'- blue- Fellows and S5 3 ut F. -

North American Portsmouth Yardstick Table of Pre-Calculated Classes
North American Portsmouth Yardstick Table of Pre-Calculated Classes A service to sailors from PRECALCULATED D-PN HANDICAPS CENTERBOARD CLASSES Boat Class Code DPN DPN1 DPN2 DPN3 DPN4 4.45 Centerboard 4.45 (97.20) (97.30) 360 Centerboard 360 (102.00) 14 (Int.) Centerboard 14 85.30 86.90 85.40 84.20 84.10 29er Centerboard 29 84.50 (85.80) 84.70 83.90 (78.90) 405 (Int.) Centerboard 405 89.90 (89.20) 420 (Int. or Club) Centerboard 420 97.60 103.40 100.00 95.00 90.80 470 (Int.) Centerboard 470 86.30 91.40 88.40 85.00 82.10 49er (Int.) Centerboard 49 68.20 69.60 505 (Int.) Centerboard 505 79.80 82.10 80.90 79.60 78.00 747 Cat Rig (SA=75) Centerboard 747 (97.60) (102.50) (98.50) 747 Sloop (SA=116) Centerboard 747SL 96.90 (97.70) 97.10 A Scow Centerboard A-SC 61.30 [63.2] 62.00 [56.0] Akroyd Centerboard AKR 99.30 (97.70) 99.40 [102.8] Albacore (15') Centerboard ALBA 90.30 94.50 92.50 88.70 85.80 Alpha Centerboard ALPH 110.40 (105.50) 110.30 110.30 Alpha One Centerboard ALPHO 89.50 90.30 90.00 [90.5] Alpha Pro Centerboard ALPRO (97.30) (98.30) American 14.6 Centerboard AM-146 96.10 96.50 American 16 Centerboard AM-16 103.60 (110.20) 105.00 American 17 Centerboard AM-17 [105.5] American 18 Centerboard AM-18 [102.0] Apache Centerboard APC (113.80) (116.10) Apollo C/B (15'9") Centerboard APOL 92.40 96.60 94.40 (90.00) (89.10) Aqua Finn Centerboard AQFN 106.30 106.40 Arrow 15 Centerboard ARO15 (96.70) (96.40) B14 Centerboard B14 (81.00) (83.90) Balboa 13 Centerboard BLB13 [91.4] Bandit (Canadian) Centerboard BNDT 98.20 (100.20) Bandit 15 Centerboard -
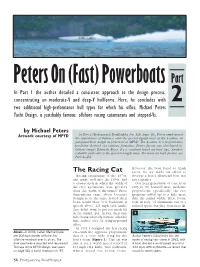
Peters on (Fast) Powerboats Part in Part 1 the Author Detailed a Consistent Approach to the Design Process, Concentrating on Moderate-V and Deep-V Hullforms
Peters On (Fast) Powerboats Part In Part 1 the author detailed a consistent approach to the design process, concentrating on moderate-V and deep-V hullforms. Here, he concludes with 2 two additional high-performance hull types for which his office, Michael Peters Yacht Design, is justifiably famous: offshore racing catamarans and stepped-Vs. by Michael Peters In Part 1 (Professional BoatBuilder No. 126, page 38), Peters emphasized Artwork courtesy of MPYD the importance of balance, and the special significance of the K-value, in fast-powerboat design as practiced at MPYD. The K-value is a performance predictor derived via various formulas; Peters favors one developed by Cuban émigré Eduardo Reyes. It’s a constant based on boat type. Another valuable indicator is the speed-to-length ratio. For more on both factors, see Part 1—Ed. However, the boat failed to finish The Racing Cat races. So we made an effort to Racing catamarans of the 1970s, develop a better all-around boat, not and many well into the 1980s, had just a sprinter. a cross-section in which the width of Our next generation of cats, from the two sponsons was greater 1983 to ’90, featured more moderate than the width of the tunnel. Those proportions: specifically, the two dimensions came about because sponsons added up to a little more designers at the time feared their than the tunnel width. These boats, boats would blow over backward at built in Italy, of aluminum, ran at a speeds above 125 mph (201 kmh); reduced speed, but they won races [2]. -

Si Ght of the Kati
Hi ri Arc h ive D ume n s to c , o c t Do not a ss ume co nte nt refle cts curre nt ci ntific kn wl d e lici r r ctic s e e es o a es . o g , po , p Si ght Of the Kati o od 01d ' HR O UGH y ea rs of pdi nsta ki ng ca re a nd selecti on, the best of the old j ' a s well a s the ra re a nd newest i ntroduc4 i on s of h i s a nd o her coun ri s t t t t e , h a ve been broug ht tog ether f or y ou r conven O P YRI GHT 1 28 C , 9 B Y EARL WOODDELL SHEETS ‘ Cou ros s n ANb Pmm n u m m WAVE RLY P RE S S Bm omc. MD U. S . A. NATIONAL CAPITAL IRISES Surplus f rom th e P ri v a t e Collect i on of t h e Owner of Treh olm e Ga rdens ears w r at st ar I a een e Through y , ith the g e e c e, h ve b coll cti ng iris es le e es not n a n all of th e ar as a hobby . Whi my coll ction do co t i v ieties n r u e et i n ll be f u s of th e ri s s r r n i t od c d, y it wi o nd mo t good i e wo th g owi g . -
2009 Road Map Index (PDF)
Road Name Grid Location Road Name Grid Location Road Name Grid Location Road Name Grid Location 113 4-H DAVISVILLE RD 6-G, 7-G, 8-G LINDSLEY RD 5-C RIVERWAY 1-D A B C D E F G H I J 114 4-H, 4-I DAWN ST 3-C LITTLE BAY ST 7-F, 8-F ROBBINS RD 8-E 1ST SHOREWAY 2-B DAWSON WAY 3-F, 3-G LITTLE HARBOR RD 10-B ROBERT RD 8-G 2ND SHOREWAY 2-B DEACON FISH LN 8-B, 8-C LITTLE ISLAND RD 4-B, 4-C ROBERTA JEAN CIR 6-G 3RD SHOREWAY 2-B DEACONS AVE 8-E LITTLE JOHN RD 4-F ROBINSON RD 8-E 4TH SHOREWAY 2-C DEARBORN AVE 7-C LITTLE LN 6-I ROCK HOLLOW DR 5-E 5TH SHOREWAY 2-C DEBBIE LN 6-H LITTLE NECK BARS RD 5-C ROCK ST 2-C 6TH SHOREWAY 2-C DEBRA ANN LN 6-H LITTLE ROCK AVE 8-E ROCKLEDGE DR 2-D 7TH SHOREWAY 2-C DEBRA ANN LN 6-G, 6-H LOCHSTEAD DR 3-G ROCKVILLE AVE 6-F ABBIES LN 1-D DECOSTA CIR 4-G LOCUST ST 8-D ROGERS RD 7-D ACADEMY LN 8-D DEELY LN 4-C LOCUSTFIELD RD 5-E, 6-E ROLLING ACRES LN 4-G, 5-G ACAPESKET RD 6-G, 7-G, 8-G DEEP POND RD 3-F LODENGREEN DR 5-G RONNIE RD 5-G ACORN DR 4-C DEEPWOOD DR 5-F LONGFELLOW RD 8-F ROSA LN 6-G LU ADAMIAN DR 3-C DEER POND RD 4-E, 5-E LONGSHANK CIR 2-E, 3-E ROSE MEADOW LN 6-G CK J L Y W A N E M ADELINES WAY 5-G DEER RUN LN 2-C LONGVIEW RD 2-D ROSE MORIN LN 7-E S E T S R D AGASSIZ RD 9-B DENHAM RD 1-D LOOKOUT AVE 8-E ROSE ST 7-E AGAWAN RD 8-C, 9-C, 8-D DENISE RD 2-C LOOP RD 6-C, 6-D ROSEMARY LN 6-G, 6-H H H D AIRPARK DR 6-H DEOLINDA PL 5-G LOREN RD 2-B, 2-C ROUND POND DR 5-F R C RIVERWAY Y T Y Y R P E T E S R R T R E BOURNE N ALBATROSS ST 9-A, 10-A DEPOT AVE 7-D, 8-D LORRAINE RD 6-G ROYAL CIR 5-I E HOLMES ST E Y S SPRUCE SOTAK -

Design and Implementation of a Control System for a Sailboat Robot ‡
Article Design and Implementation of a Control System for a Sailboat Robot ‡ Davi Santos 1,†, Andouglas G. Silva Junior 1,†, Alvaro Negreiros 1,†, João Vilas Boas 2,†, Justo Alvarez 1,†, Andre Araujo 3,†, Rafael Vidal Aroca 4,† and Luiz M. G. Gonçalves 1,* 1 Universidade Federal do Rio Grande do Norte, Natal-RN 59078-900, Brazil; [email protected] (D.S.); [email protected] (A.J.); [email protected] (A.N.); [email protected] (J.A.) 2 Instituto Federal de Educação Tecnológica do Rio Grande do Norte, Natal-RN 59015-000, Brazil; [email protected] 3 Centro de Hidrografia da Marinha do Brasil, Rio de Janeiro-RJ 24048-900, Brazil; [email protected] 4 Universidade Federal de São Carlos, São Carlos-SP 13565-905, Brazil; [email protected] * Correspondence: [email protected]; Tel.:+558-432-153-771; Fax: +558-432-153-738 † These authors contributed equally to this work. ‡ Junior, A.G.S.; Silva, M.V.A.; Araujo, A.P.; Aroca, R.V.; Gonçalves, L.M.G. N-BOAT: An Autonomous Robotic Sailboat. In Proceedings of IEEE Latin American Robotics Symposium and Competition (LARS/LARC), Arequipa, Peru, 21–27 October 2013; pp. 24–29. Academic Editor: Huosheng Hu Received: 14 November 2015; Accepted: 21 January 2016; Published: 15 February 2016 Abstract: This article discusses a control architecture for autonomous sailboat navigation and also presents a sailboat prototype built for experimental validation of the proposed architecture. The main goal is to allow long endurance autonomous missions, such as ocean monitoring. As the system propulsion relies on wind forces instead of motors, sailboat techniques are introduced and discussed, including the needed sensors, actuators and control laws. -

Desenvolvimento De Um Sistema Anticolisão Para Um Veleiro Com Navegação Autónoma
João Miguel Ferreira Esteves Licenciado em Ciências da Engenharia Eletrotécnica e de Computadores Desenvolvimento de um Sistema anticolisão para um veleiro com navegação autónoma Dissertação para obtenção do Grau de Mestre em Engenharia Eletrotécnica e de Computadores Orientador: Professor Doutor Luís Filipe dos Santos Gomes, Professor Associado com agregação, Universidade Nova de Lisboa Júri: Presidente: Doutor Luís Augusto Bica Gomes de Oliveira Arguentes: Doutor Tiago Oliveira Machado de Figueiredo Cardoso Vogais: Doutor Luís Filipe dos Santos Gomes Setembro, 2017 Desenvolvimento de um Sistema anticolisão para um veleiro com navega- ção autónoma Copyright © João Miguel Ferreira Esteves, Faculdade de Ciências e Tecnologia, Univer- sidade Nova de Lisboa. A Faculdade de Ciências e Tecnologia e a Universidade Nova de Lisboa têm o direito, perpétuo e sem limites geográficos, de arquivar e publicar esta dissertação através de exemplares impressos reproduzidos em papel ou de forma digital, ou por qualquer ou- tro meio conhecido ou que venha a ser inventado, e de a divulgar através de repositórios científicos e de admitir a sua cópia e distribuição com objetivos educacionais ou de in- vestigação, não comerciais, desde que seja dado crédito ao autor e editor. ii Dedicado aos meus pais e avós que sempre souberam meter o extra no ordinário e me ensinaram a ser um homem... Dedicado também ao meu querido irmão que já não se encontra entre nós... iii iv Agradecimentos Em primeiro lugar quero agradecer ao meu professor e orientador Luis Go- mes por me ter apoiado ao longo desta dissertação e por ter estado sempre dis- ponível a ajudar-me. Quero também agradecer à professora Anikó Costa por possibilitar desen- volver nas suas aulas projetos que me ajudaram a fazer alguns testes práticos ao Hardware utilizado.