Computer System Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Who Did What? Engineers Vs Mathematicians Title Page America Vs Europe Ideas Vs Implementations Babbage Lovelace Turing
Who did what? Engineers vs Mathematicians Title Page America vs Europe Ideas vs Implementations Babbage Lovelace Turing Flowers Atanasoff Berry Zuse Chandler Broadhurst Mauchley & Von Neumann Wilkes Eckert Williams Kilburn SlideSlide 1 1 SlideSlide 2 2 A decade of real progress What remained to be done? A number of different pioneers had during the 1930s and 40s Memory! begun to make significant progress in developing automatic calculators (computers). Thanks (almost entirely) to A.M. Turing there was a complete theoretical understanding of the elements necessary to produce a Atanasoff had pioneered the use of electronics in calculation stored program computer – or Universal Turing Machine. Zuse had mad a number of theoretical breakthroughs Not for the first time, ideas had outstripped technology. Eckert and Mauchley (with JvN) had produced ENIAC and No-one had, by the end of the war, developed a practical store or produced the EDVAC report – spreading the word memory. Newman and Flowers had developed the Colossus It should be noted that not too many people were even working on the problem. SlideSlide 3 3 SlideSlide 4 4 The players Controversy USA: Eckert, Mauchley & von Neumann – EDVAC Fall out over the EDVAC report UK: Maurice Wilkes – EDSAC Takeover of the SSEM project by Williams (Kilburn) UK: Newman – SSEM (what was the role of Colossus?) Discord on the ACE project and the departure of Turing UK: Turing - ACE EDSAC alone was harmonious We will concentrate for a little while on the SSEM – the winner! SlideSlide 5 5 SlideSlide 6 6 1 Newman & technology transfer: Secret Technology Transfer? the claim Donald Michie : Cryptanalyst An enormous amount was transferred in an extremely seminal way to the post war developments of computers in Britain. -
Hereby the Screen Stands in For, and Thereby Occludes, the Deeper Workings of the Computer Itself
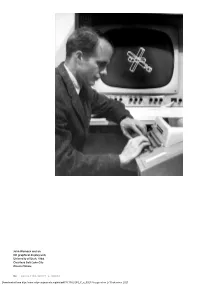
John Warnock and an IDI graphical display unit, University of Utah, 1968. Courtesy Salt Lake City Deseret News . 24 doi:10.1162/GREY_a_00233 Downloaded from http://www.mitpressjournals.org/doi/pdf/10.1162/GREY_a_00233 by guest on 27 September 2021 The Random-Access Image: Memory and the History of the Computer Screen JACOB GABOURY A memory is a means for displacing in time various events which depend upon the same information. —J. Presper Eckert Jr. 1 When we speak of graphics, we think of images. Be it the windowed interface of a personal computer, the tactile swipe of icons across a mobile device, or the surreal effects of computer-enhanced film and video games—all are graphics. Understandably, then, computer graphics are most often understood as the images displayed on a computer screen. This pairing of the image and the screen is so natural that we rarely theorize the screen as a medium itself, one with a heterogeneous history that develops in parallel with other visual and computa - tional forms. 2 What then, of the screen? To be sure, the computer screen follows in the tradition of the visual frame that delimits, contains, and produces the image. 3 It is also the skin of the interface that allows us to engage with, augment, and relate to technical things. 4 But the computer screen was also a cathode ray tube (CRT) phosphorescing in response to an electron beam, modified by a grid of randomly accessible memory that stores, maps, and transforms thousands of bits in real time. The screen is not simply an enduring technique or evocative metaphor; it is a hardware object whose transformations have shaped the ma - terial conditions of our visual culture. -

The Manchester University "Baby" Computer and Its Derivatives, 1948 – 1951”
Expert Report on Proposed Milestone “The Manchester University "Baby" Computer and its Derivatives, 1948 – 1951” Thomas Haigh. University of Wisconsin—Milwaukee & Siegen University March 10, 2021 Version of citation being responded to: The Manchester University "Baby" Computer and its Derivatives, 1948 - 1951 At this site on 21 June 1948 the “Baby” became the first computer to execute a program stored in addressable read-write electronic memory. “Baby” validated the widely used Williams- Kilburn Tube random-access memories and led to the 1949 Manchester Mark I which pioneered index registers. In February 1951, Ferranti Ltd's commercial Mark I became the first electronic computer marketed as a standard product ever delivered to a customer. 1: Evaluation of Citation The final wording is the result of several rounds of back and forth exchange of proposed drafts with the proposers, mediated by Brian Berg. During this process the citation text became, from my viewpoint at least, far more precise and historically reliable. The current version identifies several distinct contributions made by three related machines: the 1948 “Baby” (known officially as the Small Scale Experimental Machine or SSEM), a minimal prototype computer which ran test programs to prove the viability of the Manchester Mark 1, a full‐scale computer completed in 1949 that was fully designed and approved only after the success of the “Baby” and in turn served as a prototype of the Ferranti Mark 1, a commercial refinement of the Manchester Mark 1 of which I believe 9 copies were sold. The 1951 date refers to the delivery of the first of these, to Manchester University as a replacement for its home‐built Mark 1. -

1. Types of Computers Contents
1. Types of Computers Contents 1 Classes of computers 1 1.1 Classes by size ............................................. 1 1.1.1 Microcomputers (personal computers) ............................ 1 1.1.2 Minicomputers (midrange computers) ............................ 1 1.1.3 Mainframe computers ..................................... 1 1.1.4 Supercomputers ........................................ 1 1.2 Classes by function .......................................... 2 1.2.1 Servers ............................................ 2 1.2.2 Workstations ......................................... 2 1.2.3 Information appliances .................................... 2 1.2.4 Embedded computers ..................................... 2 1.3 See also ................................................ 2 1.4 References .............................................. 2 1.5 External links ............................................. 2 2 List of computer size categories 3 2.1 Supercomputers ............................................ 3 2.2 Mainframe computers ........................................ 3 2.3 Minicomputers ............................................ 3 2.4 Microcomputers ........................................... 3 2.5 Mobile computers ........................................... 3 2.6 Others ................................................. 4 2.7 Distinctive marks ........................................... 4 2.8 Categories ............................................... 4 2.9 See also ................................................ 4 2.10 References -

A Large Routine
A large routine Freek Wiedijk It is not widely known, but already in June 1949∗ Alan Turing had the main concepts that still are the basis for the best approach to program verification known today (and for which Tony Hoare developed a logic in 1969). In his three page paper Checking a large routine, Turing describes how to verify the correctness of a program that calculates the factorial function by repeated additions. He both shows how to use invariants to establish the correctness of this program, as well as how to use a variant to establish termination. In the paper the program is only presented as a flow chart. A modern C rendering is: int fac (int n) { int s, r, u, v; for (u = r = 1; v = u, r < n; r++) for (s = 1; u += v, s++ < r; ) ; return u; } Turing's paper seems not to have been properly appreciated at the time. At the EDSAC conference where Turing presented the paper, Douglas Hartree criticized that the correctness proof sketched by Turing should not be called inductive. From a modern point of view this is clearly absurd. Marc Schoolderman first told me about this paper (and in his master's thesis used the modern Why3 tool of Jean-Christophe Filli^atreto make Turing's paper fully precise; he also wrote the above C version of Turing's program). He then challenged me to speculate what specific computer Turing had in mind in the paper, and what the actual program for that computer might have been. My answer is that the `EPICAC'y of this paper probably was the Manchester Mark 1. -

Unioversity the World's First Programmable Computer Was Developed at Manchester University
ElPioneers In Computing Unioversity The world's first programmable computer was developed at Manchester University After the Second World War had ended, of being random access, and the contents of the Manchester University appointed two new main store or the control register could be visually professors. Following his code-breaking work displayed. with Colossus, the world's first electromechanical Once the feasibility of using a Williams tube for computer, at Bletchley Park, Max Newman memory storage was established, an enhanced became professor of mathematics; and a radar Mark I was built that could perform work on engineer, F C Williams, was appointed head of optics design problems and the generation of electrical engineering. Williams brought with him prime numbers. The government chief scientist, a young assistant, Tom Kilburn, who was familiar Sir Ben Lockspeiser, was so impressed by the with the problems of pulse electronic-memory performance of the computer that he arranged for devices, which he had encountered in his wartime a commercial version of the Mark Ito be built by a work with radar. Kilburn was later to become the local Manchester company. The Ferranti Mark I first professor of the new discipline of computer became available in February 1951, preceding studies at Manchester University. UNIVAC by five months and establishing itself as During a tour of radar establishments in the the first commercially available computer. United States in 1946, Williams had been shown An important innovation on the Ferranti Mark the prototype of the valve computer ENIAC (see I was its ability to modify instructions during page 46), and on his return to England he processing using another store called the `B' tube. -

TURING and the PRIMES Alan Turing's Exploits in Code Breaking, Philosophy, Artificial Intelligence and the Founda- Tions of Co
TURING AND THE PRIMES ANDREW R. BOOKER Alan Turing's exploits in code breaking, philosophy, artificial intelligence and the founda- tions of computer science are by now well known to many. Less well known is that Turing was also interested in number theory, in particular the distribution of prime numbers and the Riemann Hypothesis. These interests culminated in two programs that he implemented on the Manchester Mark 1, the first stored-program digital computer, during its 18 months of operation in 1949{50. Turing's efforts in this area were modest,1 and one should be careful not to overstate their influence. However, one cannot help but see in these investigations the beginning of the field of computational number theory, bearing a close resemblance to active problems in the field today, despite a gap of 60 years. We can also perceive, in hind- sight, some striking connections to Turing's other areas of interests, in ways that might have seemed far fetched in his day. This chapter will attempt to explain the two problems in detail, including their early history, Turing's contributions, some of the developments since the 1950s, and speculation for the future. A bit of history Turing's plans for a computer. Soon after his involvement in the war effort ended, Turing set about plans for a general-purpose digital computer. He submitted a detailed design for the Automatic Computing Engine (ACE) to the National Physics Laboratory in early 1946. Turing's design drew on both his theoretical work \On Computable Numbers" from a decade earlier, and the practical knowledge gained during the war from working at Bletchley Park, where the Colossus machines were developed and used. -
Test Yourself (Quiz 1)
Test Yourself (Quiz 1) 1. Explain the significance of the ABC computer. 2. Explain the main features of Agile including scrum and sprints. 3. Explain the significance of the Apple Macintosh. What are Apple’s key innovations? 4. Describe Gene Amdahl’s contributions to IBM and the Amdahl Corporation. 5. Describe the components of the Analytic Engine, and explain their function. 6. Explain why Lady Ada Lovelace is considered the world’s first programmer. 7. Discuss the significance of the Difference Engine. 8. Describe the Turing test. Is it an appropriate test of machine intelligence? 9. Describe Searle’s Chinese room thought experiment, and discuss whether it is an effective rebuttal of machine intelligence. 10. Discuss the significance of Atari in the history of computing. 11. Explain binary numbers and their importance in the computing field. 12. Explain why Shannon’s Master’s thesis is a key milestone in computing. 13. Describe how Boolean logic may be employed in the design of digital circuits. 14. Explain the importance of Boole’s equation x2 = x as a fundamental law of thought. 15. Discuss the similarities and differences between C and C++. 16. Explain cloud computing and distributed computing. 17. What is the CMMI? 18. Explain why Watt Humphrey is known as the father of software quality. 19. Describe Flower’s work on the Colossus computer at Bletchley Park and how the machine was used to crack the Lorenz codes. 20. Describe Grace Murray Hopper’s contribution to the COBOL programming language. 21. What is a compiler? Explain the various parts of a compiler. -

At Grange Farm the COMPUTER – the 20Th Century’S Legacy to the Next Millennium
Computer Commemoration At Grange Farm THE COMPUTER – the 20th century’s legacy to the next millennium. This monument commemorates the early pioneers responsible for the development of machines that led to, or indeed were, the first electronic digital computers. This spot was chosen because the COLOSSUS, the first effective, operational, automatic, electronic, digital computer, was constructed by the Post Office Research Station at Dollis Hill (now BT research), whose research and development later moved from that site to Martlesham, just east of here and the landowners thought this would be a suitable setting to commemorate this achievement. The story of these machines has nothing to do with the names and companies that we associate with computers today. Indeed the originators of the computer are largely unknown, and their achievement little recorded. All the more worth recording is that this first machine accomplished a task perhaps as important as that entrusted to any computer since. The electronic digital computer is one of the greatest legacies the 20th century leaves to the 21st. The History of Computing… The shape of the monument is designed to reflect a fundamental concept in mathematics. This is explained in the frame entitled “The Monument”. You will notice that some of the Stations are blue and some are orange. Blue stations talk about concepts and ideas pertinent to the development of the computer, and orange ones talk about actual machines and the events surrounding them. The monument was designed and funded by a grant making charity. FUNDAMENTAL FEATURES OF COMPUTERS The computer is now so sophisticated that attention is not normally drawn to its fundamental characteristics. -

Alan Turing and the Riemann Zeta Function
Alan Turing and the Riemann Zeta Function Dennis A. Hejhala,b, Andrew M. Odlyzkoa aSchool of Mathematics University of Minnesota Minneapolis, Minnesota, USA [email protected], [email protected] bDepartment of Mathematics Uppsala University Uppsala, Sweden [email protected] 1. Introduction Turing encountered the Riemann zeta function as a student, and devel- oped a life-long fascination with it. Though his research in this area was not a major thrust of his career, he did make a number of pioneering contribu- tions. Most have now been superseded by later work, but one technique that he introduced is still a standard tool in the computational analysis of the zeta and related functions. It is known as Turing's method, and keeps his name alive in those areas. Of Turing's two published papers [27, 28] involving the Riemann zeta function ζ(s), the second1 is the more significant. In it, Turing reports on the first calculation of zeros of ζ(s) ever done with the aid of an electronic digital computer. It was in developing the theoretical underpinnings for this work that Turing's method first came into existence. Our primary aim in this chapter is to provide an overview of Turing's work on the zeta function. The influence that interactions with available technology and with other researchers had on his thinking is deduced from [27, 28] as well as some unpublished manuscripts of his (available in [29]) and related correspondence, some newly discovered. (To minimize any overlap with other chapters, we do not discuss Turing's contributions to computing 1 reproduced on pages NAA{NZZ above Preprint submitted to Elsevier August 29, 2011 in general, even though they did influence the work on ζ(s) that he and those who followed in his footsteps carried out.) Andrew Booker's recent survey article [3] has a significant overlap with what we say here and is highly recommended as a collateral \read." 2. -
Manchester Baby Simulator User Guide
Manchester Baby Simulator User Guide By David Sharp The University of Warwick 11th January 2001 Freddie Williams and Tom Kilburn in front of the Baby or one of it’s close descendants. Historical background The Manchester Baby (also known as the Small Scale Experimental Machine) was the first working stored-program computer. That is a computer which stores and executes its program from an electronic storage device rather than for example reading it from a punched tape. It was built at the University of Manchester by Tom Kilburn, Freddie Williams and Geoff Tootill, successfully running its first program on June 21st 1948. All three of the team had previously worked with radar technology at the Telecommunications Research Establishment (TRE) in Malvern and this had led the team to working with cathode ray tubes (CRT). Williams had visited the ENIAC project at the University of Pennsylvania in 1946 also reading the EDVAC report. He took away the stored-program concept as well as the need for a large high-speed electronic storage device, for which he saw CRTs as a prime candidate. The primary purpose of the Baby was to test the ideas of Williams and Kilburn of using a CRT as a data storage device for a computer. Although they could store data on a CRT for long periods of time, this wasn’t evidence of its suitability for a computer where the data was constantly changing at high speed and hence they had to build a computer to test it. To this end, Kilburn designed, “the smallest computer which was a true computer (that is a stored program computer) which [he] could devise”1. -
Core Magazine May 2001
MAY 2001 CORE 2.2 A PUBLICATION OF THE COMPUTER MUSEUM HISTORY CENTER WWW.COMPUTERHISTORY.ORG A TRIBUTE TO MUSEUM FELLOW TOM KILBURN PAGE 1 May 2001 A FISCAL YEAR OF COREA publication of The Computer Museum2.2 History Center IN THIS MISSION ISSUE CHANGE TO PRESERVE AND PRESENT FOR POSTERITY THE ARTIFACTS AND STORIES OF THE INFORMATION AGE VISION INSIDE FRONT COVER At the end of June, the Museum will end deserved rest before deciding what to Visible Storage Exhibit Area—The staff TO EXPLORE THE COMPUTING REVOLUTION AND ITS A FISCAL YEAR OF CHANGE John C Toole another fiscal year. Time has flown as do next. His dedication, expertise, and and volunteers have worked hard to give IMPACT ON THE HUMAN EXPERIENCE we’ve grown and changed in so many smiling face will be sorely missed, the middle bay a new “look and feel.” 2 ways. I hope that each of you have although I feel he will be part of our For example, if you haven’t seen the A TRIBUTE TO TOM KILBURN already become strong supporters in future in some way. We have focused new exhibit “Innovation 101,” you are in Brian Napper and Hilary Kahn every aspect of our growth, including key recruiting efforts on building a new for a treat. EXECUTIVE STAFF our annual campaign–it’s so critical to curatorial staff for the years ahead. 7 John C Toole FROM THE PHOTO COLLECTION: our operation. And there’s still time to Charlie Pfefferkorn—a great resource Collections—As word spreads, our EXECUTIVE DIRECTOR & CEO 2 CAPTURING HISTORY help us meet the financial demands of and long-time volunteer—has been collection grows, which emphasizes our Karen Mathews Chris Garcia this year’s programs! contracted to help during this transition.