Instruction Set Architectures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

May 21St at the Time, the EDSAC Used IBM 726 Three Small Cathode Ray Tube Börje Langefors Screens to Display the State of Its Announced Memory
it played tic-tac-toe (known as Noughts and Crosses in the UK). May 21st At the time, the EDSAC used IBM 726 three small cathode ray tube Börje Langefors screens to display the state of its Announced memory. Each one could draw a May 21, 1952 Born: May 21, 1915; grid of 35 x 16 dots. Douglas re- purposed one of them for his Ystad, Sweden The IBM 726 was the company’s game, and obtained input (i.e. Died: Dec. 13, 2009 first magnetic tape unit, where to place a nought or intended for use with the Langefors developed the cross) via EDSAC’s rotary recently announced IBM 701 ‘infological equation’ in 1980, controller. [April 7], the company’s first which describes the difference electronic computer. between information and data in terms of additional semantic The 726 utilized half-inch tapes background and a with seven tracks. Six were for communication time interval. the data and the seventh was employed as a parity track. Langefors joined SAAB, the Some tapes were 1,200 feet long, Swedish aerospace and defense could store 2.3 MB of data, and company, in 1949 where he IBM claimed that just one could utilized analog devices for replace 12,500 punch cards. calculating wing stresses. The need for more powerful tools The drive could write 100 became evident, and the only characters per inch on a tape Swedish computer of the time, EDSAC CRT Tubes. Computer and read 75 inches per second. the BESK [April 1], was Lab, Univ. of Cambridge. CC BY To withstand the system’s fast insufficient for the task. -

"Computers" Abacus—The First Calculator
Component 4: Introduction to Information and Computer Science Unit 1: Basic Computing Concepts, Including History Lecture 4 BMI540/640 Week 1 This material was developed by Oregon Health & Science University, funded by the Department of Health and Human Services, Office of the National Coordinator for Health Information Technology under Award Number IU24OC000015. The First "Computers" • The word "computer" was first recorded in 1613 • Referred to a person who performed calculations • Evidence of counting is traced to at least 35,000 BC Ishango Bone Tally Stick: Science Museum of Brussels Component 4/Unit 1-4 Health IT Workforce Curriculum 2 Version 2.0/Spring 2011 Abacus—The First Calculator • Invented by Babylonians in 2400 BC — many subsequent versions • Used for counting before there were written numbers • Still used today The Chinese Lee Abacus http://www.ee.ryerson.ca/~elf/abacus/ Component 4/Unit 1-4 Health IT Workforce Curriculum 3 Version 2.0/Spring 2011 1 Slide Rules John Napier William Oughtred • By the Middle Ages, number systems were developed • John Napier discovered/developed logarithms at the turn of the 17 th century • William Oughtred used logarithms to invent the slide rude in 1621 in England • Used for multiplication, division, logarithms, roots, trigonometric functions • Used until early 70s when electronic calculators became available Component 4/Unit 1-4 Health IT Workforce Curriculum 4 Version 2.0/Spring 2011 Mechanical Computers • Use mechanical parts to automate calculations • Limited operations • First one was the ancient Antikythera computer from 150 BC Used gears to calculate position of sun and moon Fragment of Antikythera mechanism Component 4/Unit 1-4 Health IT Workforce Curriculum 5 Version 2.0/Spring 2011 Leonardo da Vinci 1452-1519, Italy Leonardo da Vinci • Two notebooks discovered in 1967 showed drawings for a mechanical calculator • A replica was built soon after Leonardo da Vinci's notes and the replica The Controversial Replica of Leonardo da Vinci's Adding Machine . -

Early Stored Program Computers
Stored Program Computers Thomas J. Bergin Computing History Museum American University 7/9/2012 1 Early Thoughts about Stored Programming • January 1944 Moore School team thinks of better ways to do things; leverages delay line memories from War research • September 1944 John von Neumann visits project – Goldstine’s meeting at Aberdeen Train Station • October 1944 Army extends the ENIAC contract research on EDVAC stored-program concept • Spring 1945 ENIAC working well • June 1945 First Draft of a Report on the EDVAC 7/9/2012 2 First Draft Report (June 1945) • John von Neumann prepares (?) a report on the EDVAC which identifies how the machine could be programmed (unfinished very rough draft) – academic: publish for the good of science – engineers: patents, patents, patents • von Neumann never repudiates the myth that he wrote it; most members of the ENIAC team contribute ideas; Goldstine note about “bashing” summer7/9/2012 letters together 3 • 1.0 Definitions – The considerations which follow deal with the structure of a very high speed automatic digital computing system, and in particular with its logical control…. – The instructions which govern this operation must be given to the device in absolutely exhaustive detail. They include all numerical information which is required to solve the problem…. – Once these instructions are given to the device, it must be be able to carry them out completely and without any need for further intelligent human intervention…. • 2.0 Main Subdivision of the System – First: since the device is a computor, it will have to perform the elementary operations of arithmetics…. – Second: the logical control of the device is the proper sequencing of its operations (by…a control organ. -

Technical Details of the Elliott 152 and 153
Appendix 1 Technical Details of the Elliott 152 and 153 Introduction The Elliott 152 computer was part of the Admiralty’s MRS5 (medium range system 5) naval gunnery project, described in Chap. 2. The Elliott 153 computer, also known as the D/F (direction-finding) computer, was built for GCHQ and the Admiralty as described in Chap. 3. The information in this appendix is intended to supplement the overall descriptions of the machines as given in Chaps. 2 and 3. A1.1 The Elliott 152 Work on the MRS5 contract at Borehamwood began in October 1946 and was essen- tially finished in 1950. Novel target-tracking radar was at the heart of the project, the radar being synchronized to the computer’s clock. In his enthusiasm for perfecting the radar technology, John Coales seems to have spent little time on what we would now call an overall systems design. When Harry Carpenter joined the staff of the Computing Division at Borehamwood on 1 January 1949, he recalls that nobody had yet defined the way in which the control program, running on the 152 computer, would interface with guns and radar. Furthermore, nobody yet appeared to be working on the computational algorithms necessary for three-dimensional trajectory predic- tion. As for the guns that the MRS5 system was intended to control, not even the basic ballistics parameters seemed to be known with any accuracy at Borehamwood [1, 2]. A1.1.1 Communication and Data-Rate The physical separation, between radar in the Borehamwood car park and digital computer in the laboratory, necessitated an interconnecting cable of about 150 m in length. -

An Early Program Proof by Alan Turing F
An Early Program Proof by Alan Turing F. L. MORRIS AND C. B. JONES The paper reproduces, with typographical corrections and comments, a 7 949 paper by Alan Turing that foreshadows much subsequent work in program proving. Categories and Subject Descriptors: 0.2.4 [Software Engineeringj- correctness proofs; F.3.1 [Logics and Meanings of Programs]-assertions; K.2 [History of Computing]-software General Terms: Verification Additional Key Words and Phrases: A. M. Turing Introduction The standard references for work on program proofs b) have been omitted in the commentary, and ten attribute the early statement of direction to John other identifiers are written incorrectly. It would ap- McCarthy (e.g., McCarthy 1963); the first workable pear to be worth correcting these errors and com- methods to Peter Naur (1966) and Robert Floyd menting on the proof from the viewpoint of subse- (1967); and the provision of more formal systems to quent work on program proofs. C. A. R. Hoare (1969) and Edsger Dijkstra (1976). The Turing delivered this paper in June 1949, at the early papers of some of the computing pioneers, how- inaugural conference of the EDSAC, the computer at ever, show an awareness of the need for proofs of Cambridge University built under the direction of program correctness and even present workable meth- Maurice V. Wilkes. Turing had been writing programs ods (e.g., Goldstine and von Neumann 1947; Turing for an electronic computer since the end of 1945-at 1949). first for the proposed ACE, the computer project at the The 1949 paper by Alan M. -
Law and Military Operations in Kosovo: 1999-2001, Lessons Learned For
LAW AND MILITARY OPERATIONS IN KOSOVO: 1999-2001 LESSONS LEARNED FOR JUDGE ADVOCATES Center for Law and Military Operations (CLAMO) The Judge Advocate General’s School United States Army Charlottesville, Virginia CENTER FOR LAW AND MILITARY OPERATIONS (CLAMO) Director COL David E. Graham Deputy Director LTC Stuart W. Risch Director, Domestic Operational Law (vacant) Director, Training & Support CPT Alton L. (Larry) Gwaltney, III Marine Representative Maj Cody M. Weston, USMC Advanced Operational Law Studies Fellows MAJ Keith E. Puls MAJ Daniel G. Jordan Automation Technician Mr. Ben R. Morgan Training Centers LTC Richard M. Whitaker Battle Command Training Program LTC James W. Herring Battle Command Training Program MAJ Phillip W. Jussell Battle Command Training Program CPT Michael L. Roberts Combat Maneuver Training Center MAJ Michael P. Ryan Joint Readiness Training Center CPT Peter R. Hayden Joint Readiness Training Center CPT Mark D. Matthews Joint Readiness Training Center SFC Michael A. Pascua Joint Readiness Training Center CPT Jonathan Howard National Training Center CPT Charles J. Kovats National Training Center Contact the Center The Center’s mission is to examine legal issues that arise during all phases of military operations and to devise training and resource strategies for addressing those issues. It seeks to fulfill this mission in five ways. First, it is the central repository within The Judge Advocate General's Corps for all-source data, information, memoranda, after-action materials and lessons learned pertaining to legal support to operations, foreign and domestic. Second, it supports judge advocates by analyzing all data and information, developing lessons learned across all military legal disciplines, and by disseminating these lessons learned and other operational information to the Army, Marine Corps, and Joint communities through publications, instruction, training, and databases accessible to operational forces, world-wide. -

Chapter 1 Computer Basics
Chapter 1 Computer Basics 1.1 History of the Computer A computer is a complex piece of machinery made up of many parts, each of which can be considered a separate invention. abacus Ⅰ. Prehistory /ˈæbəkəs/ n. 算盘 The abacus, which is a simple counting aid, might have been invented in Babylonia(now Iraq) in the fourth century BC. It should be the ancestor of the modern digital calculator. Figure 1.1 Abacus Wilhelm Schickard built the first mechanical calculator in 1623. It can loom work with six digits and carry digits across columns. It works, but never /lu:m/ makes it beyond the prototype stage. n. 织布机 Blaise Pascal built a mechanical calculator, with the capacity for eight digits. However, it had trouble carrying and its gears tend to jam. punch cards Joseph-Marie Jacquard invents an automatic loom controlled by punch 穿孔卡片 cards. Difference Engine Charles Babbage conceived of a Difference Engine in 1820. It was a 差分机 massive steam-powered mechanical calculator designed to print astronomical tables. He attempted to build it over the course of the next 20 years, only to have the project cancelled by the British government in 1842. 1 新编计算机专业英语 Analytical Engine Babbage’s next idea was the Analytical Engine-a mechanical computer which 解析机(早期的机 could solve any mathematical problem. It used punch-cards similar to those used 械通用计算机) by the Jacquard loom and could perform simple conditional operations. countess Augusta Ada Byron, the countess of Lovelace, met Babbage in 1833. She /ˈkaʊntɪs/ described the Analytical Engine as weaving “algebraic patterns just as the n. -
The History of Computers: Part II
The History Of Computers: Part II You will learn about the computers of the 20th century and the people behind those machines. Some of the clipart images come from the sites: •http://www.clipartheaven.com/ •http://www.horton-szar.net/ •http://www.shootpetoet.be •www.dpw.wau.nl/pv/temp/ clipart/screenbeans.htm James Tam Categories Of 20th Century Computers •The mechanical monsters of the twenty first century - The machines of Konrad Zuse - The Bell telephone models - Howard Aiken and the Harvard computers •The computers of the electronic revolution -The ABC -The ENIAC - The Colossus machines of Bletchley Park •The first modern (stored program/memory) computers - The Manchester machine -The EDSAC - The EDVAC James Tam Computer History: Part II 1 The Mechanical Monsters •Performed calculations using moving mechanical parts rather than using electronics Images from the History of Computing Technology by Michael R. Williams James Tam The Mechanical Monsters •Many were used to solve equations that were either impossible or very time consuming to solve analytically. •Often conducting experiments were also impractical. James Tam Computer History: Part II 2 The Mechanical Monsters •Konrad Zuse -Z1 –Z4 •George Stibitz - Bell relay based computers Model I - VI •Howard Aiken - Harvard Mark I - IV James Tam The First Set Of Mechanical Monsters Were Created By Konrad Zuse •Developed a series of mechanical calculating machines (Z1, Z2, Z3, Z4). •Motivated by the need to perform complex calculations because current approaches were unsatisfactory. James Tam Computer History: Part II 3 The Z1 •It was entirely mechanical From the History of Computing Technology by Michael R. -

Copyrighted Material
1 The Function of Computation As in music theory, we cannot discuss the microprocessor without positioning it in the context of the history of the computer, since this component is the integrated version of the central unit. Its internal mechanisms are the same as those of supercomputers, mainframe computers and minicomputers. Thanks to advances in microelectronics, additional functionality has been integrated with each generation in order to speed up internal operations. A computer1 is a hardware and software system responsible for the automatic processing of information, managed by a stored program. To accomplish this task, the computer’s essential function is the transformation of data using computation, but two other functions are also essential. Namely, these are storing and transferring information (i.e. communication). In some industrial fields, control is a fourth function. This chapter focuses on the requirements that led to the invention of tools and calculating machines to arrive at the modern version of the computer that we know today. The technological aspect is then addressed. Some chronological references are given. Then several classification criteria are proposed. The analog computer, which is then described, was an alternative to the digital version. Finally, the relationship between hardware and software and the evolution of integration and its limits are addressed. NOTE.– This chapter does not attempt to replace a historical study. It gives only a few key dates and technical benchmarks to understand the technological evolution of the field. COPYRIGHTED MATERIAL 1 The French word ordinateur (computer) was suggested by Jacques Perret, professor at the Faculté des Lettres de Paris, in his letter dated April 16, 1955, in response to a question from IBM to name these machines; the English name was the Electronic Data Processing Machine. -
Open PDF in New Window
BEST AVAILABLE COPY i The pur'pose of this DIGITAL COMPUTER Itop*"°a""-'"""neesietter' YNEWSLETTER . W OFFICf OF NIVAM RUSEARCMI • MATNEMWTICAL SCIENCES DIVISION Vol. 9, No. 2 Editors: Gordon D. Goldstein April 1957 Albrecht J. Neumann TABLE OF CONTENTS It o Page No. W- COMPUTERS. U. S. A. "1.Air Force Armament Center, ARDC, Eglin AFB, Florida 1 2. Air Force Cambridge Research Center, Bedford, Mass. 1 3. Autonetics, RECOMP, Downey, Calif. 2 4. Corps of Engineers, U. S. Army 2 5. IBM 709. New York, New York 3 6. Lincoln Laboratory TX-2, M.I.T., Lexington, Mass. 4 7. Litton Industries 20 and 40 DDA, Beverly Hills, Calif. 5 8. Naval Air Test Centcr, Naval Air Station, Patuxent River, Maryland 5 9. National Cash Register Co. NC 304, Dayton, Ohio 6 10. Naval Air Missile Test Center, RAYDAC, Point Mugu, Calif. 7 11. New York Naval Shipyard, Brooklyn, New York 7 12. Philco, TRANSAC. Philadelphia, Penna. 7 13. Western Reserve Univ., Cleveland, Ohio 8 COMPUTING CENTERS I. Univ. of California, Radiation Lab., Livermore, Calif. 9 2. Univ. of California, SWAC, Los Angeles, Calif. 10 3. Electronic Associates, Inc., Princeton Computation Center, Princeton, New Jersey 10 4. Franklin Institute Laboratories, Computing Center, Philadelphia, Penna. 11 5. George Washington Univ., Logistics Research Project, Washington, D. C. 11 6. M.I.T., WHIRLWIND I, Cambridge, Mass. 12 7. National Bureau of Standards, Applied Mathematics Div., Washington, D.C. 12 8. Naval Proving Ground, Naval Ordnance Computation Center, Dahlgren, Virgin-.a 12 9. Ramo Wooldridge Corp., Digital Computing Center, Los Angeles, Calif. -

Who Did What? Engineers Vs Mathematicians Title Page America Vs Europe Ideas Vs Implementations Babbage Lovelace Turing
Who did what? Engineers vs Mathematicians Title Page America vs Europe Ideas vs Implementations Babbage Lovelace Turing Flowers Atanasoff Berry Zuse Chandler Broadhurst Mauchley & Von Neumann Wilkes Eckert Williams Kilburn SlideSlide 1 1 SlideSlide 2 2 A decade of real progress What remained to be done? A number of different pioneers had during the 1930s and 40s Memory! begun to make significant progress in developing automatic calculators (computers). Thanks (almost entirely) to A.M. Turing there was a complete theoretical understanding of the elements necessary to produce a Atanasoff had pioneered the use of electronics in calculation stored program computer – or Universal Turing Machine. Zuse had mad a number of theoretical breakthroughs Not for the first time, ideas had outstripped technology. Eckert and Mauchley (with JvN) had produced ENIAC and No-one had, by the end of the war, developed a practical store or produced the EDVAC report – spreading the word memory. Newman and Flowers had developed the Colossus It should be noted that not too many people were even working on the problem. SlideSlide 3 3 SlideSlide 4 4 The players Controversy USA: Eckert, Mauchley & von Neumann – EDVAC Fall out over the EDVAC report UK: Maurice Wilkes – EDSAC Takeover of the SSEM project by Williams (Kilburn) UK: Newman – SSEM (what was the role of Colossus?) Discord on the ACE project and the departure of Turing UK: Turing - ACE EDSAC alone was harmonious We will concentrate for a little while on the SSEM – the winner! SlideSlide 5 5 SlideSlide 6 6 1 Newman & technology transfer: Secret Technology Transfer? the claim Donald Michie : Cryptanalyst An enormous amount was transferred in an extremely seminal way to the post war developments of computers in Britain. -
Hereby the Screen Stands in For, and Thereby Occludes, the Deeper Workings of the Computer Itself
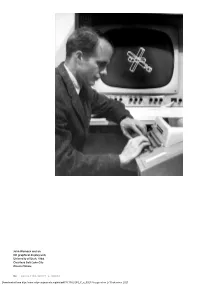
John Warnock and an IDI graphical display unit, University of Utah, 1968. Courtesy Salt Lake City Deseret News . 24 doi:10.1162/GREY_a_00233 Downloaded from http://www.mitpressjournals.org/doi/pdf/10.1162/GREY_a_00233 by guest on 27 September 2021 The Random-Access Image: Memory and the History of the Computer Screen JACOB GABOURY A memory is a means for displacing in time various events which depend upon the same information. —J. Presper Eckert Jr. 1 When we speak of graphics, we think of images. Be it the windowed interface of a personal computer, the tactile swipe of icons across a mobile device, or the surreal effects of computer-enhanced film and video games—all are graphics. Understandably, then, computer graphics are most often understood as the images displayed on a computer screen. This pairing of the image and the screen is so natural that we rarely theorize the screen as a medium itself, one with a heterogeneous history that develops in parallel with other visual and computa - tional forms. 2 What then, of the screen? To be sure, the computer screen follows in the tradition of the visual frame that delimits, contains, and produces the image. 3 It is also the skin of the interface that allows us to engage with, augment, and relate to technical things. 4 But the computer screen was also a cathode ray tube (CRT) phosphorescing in response to an electron beam, modified by a grid of randomly accessible memory that stores, maps, and transforms thousands of bits in real time. The screen is not simply an enduring technique or evocative metaphor; it is a hardware object whose transformations have shaped the ma - terial conditions of our visual culture.