Modelling Glacier Flow
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
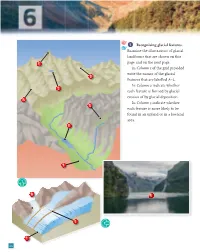
1 Recognising Glacial Features. Examine the Illustrations of Glacial Landforms That Are Shown on This Page and on the Next Page
1 Recognising glacial features. Examine the illustrations of glacial landforms that are shown on this C page and on the next page. In Column 1 of the grid provided write the names of the glacial D features that are labelled A–L. In Column 2 indicate whether B each feature is formed by glacial erosion of by glacial deposition. A In Column 3 indicate whether G each feature is more likely to be found in an upland or in a lowland area. E F 1 H K J 2 I 24 Chapter 6 L direction of boulder clay ice flow 3 Column 1 Column 2 Column 3 A Arête Erosion Upland B Tarn (cirque with tarn) Erosion Upland C Pyramidal peak Erosion Upland D Cirque Erosion Upland E Ribbon lake Erosion Upland F Glaciated valley Erosion Upland G Hanging valley Erosion Upland H Lateral moraine Deposition Lowland (upland also accepted) I Frontal moraine Deposition Lowland (upland also accepted) J Medial moraine Deposition Lowland (upland also accepted) K Fjord Erosion Upland L Drumlin Deposition Lowland 2 In the boxes provided, match each letter in Column X with the number of its pair in Column Y. One pair has been completed for you. COLUMN X COLUMN Y A Corrie 1 Narrow ridge between two corries A 4 B Arête 2 Glaciated valley overhanging main valley B 1 C Fjord 3 Hollow on valley floor scooped out by ice C 5 D Hanging valley 4 Steep-sided hollow sometimes containing a lake D 2 E Ribbon lake 5 Glaciated valley drowned by rising sea levels E 3 25 New Complete Geography Skills Book 3 (a) Landform of glacial erosion Name one feature of glacial erosion and with the aid of a diagram explain how it was formed. -

What Glaciers Are Telling Us About Earth's Changing Climate
Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | The Cryosphere Discuss., 8, 3475–3491, 2014 www.the-cryosphere-discuss.net/8/3475/2014/ doi:10.5194/tcd-8-3475-2014 TCD © Author(s) 2014. CC Attribution 3.0 License. 8, 3475–3491, 2014 This discussion paper is/has been under review for the journal The Cryosphere (TC). What glaciers are Please refer to the corresponding final paper in TC if available. telling us about Earth’s changing What glaciers are telling us about Earth’s climate changing climate W. Tangborn and M. Mosteller W. Tangborn1 and M. Mosteller2 1HyMet Inc., Vashon Island, WA, USA Title Page 2 Vashon IT, Vashon Island, WA, USA Abstract Introduction Received: 12 June 2014 – Accepted: 24 June 2014 – Published: 1 July 2014 Conclusions References Correspondence to: W. Tangborn ([email protected]) and Tables Figures M. Mosteller ([email protected]) Published by Copernicus Publications on behalf of the European Geosciences Union. J I J I Back Close Full Screen / Esc Printer-friendly Version Interactive Discussion 3475 Discussion Paper | Discussion Paper | Discussion Paper | Discussion Paper | Abstract TCD A glacier monitoring system has been developed to systematically observe and docu- ment changes in the size and extent of a representative selection of the world’s 160 000 8, 3475–3491, 2014 mountain glaciers (entitled the PTAAGMB Project). Its purpose is to assess the impact 5 of climate change on human societies by applying an established relationship between What glaciers are glacier ablation and global temperatures. Two sub-systems were developed to accom- telling us about plish this goal: (1) a mass balance model that produces daily and annual glacier bal- Earth’s changing ances using routine meteorological observations, (2) a program that uses Google Maps climate to display satellite images of glaciers and the graphical results produced by the glacier 10 balance model. -

Surface Mass Balance of Davies Dome and Whisky Glacier on James Ross Island, North-Eastern Antarctic Peninsula, Based on Different Volume-Mass Conversion Approaches
CZECH POLAR REPORTS 9 (1): 1-12, 2019 Surface mass balance of Davies Dome and Whisky Glacier on James Ross Island, north-eastern Antarctic Peninsula, based on different volume-mass conversion approaches Zbyněk Engel1*, Filip Hrbáček2, Kamil Láska2, Daniel Nývlt2, Zdeněk Stachoň2 1Charles University, Faculty of Science, Department of Physical Geography and Geoecology, Albertov 6, 128 43 Praha, Czech Republic 2Masaryk University, Faculty of Science, Department of Geography, Kotlářská 2, 611 37 Brno, Czech Republic Abstract This study presents surface mass balance of two small glaciers on James Ross Island calculated using constant and zonally-variable conversion factors. The density of 500 and 900 kg·m–3 adopted for snow in the accumulation area and ice in the ablation area, respectively, provides lower mass balance values that better fit to the glaciological records from glaciers on Vega Island and South Shetland Islands. The difference be- tween the cumulative surface mass balance values based on constant (1.23 ± 0.44 m w.e.) and zonally-variable density (0.57 ± 0.67 m w.e.) is higher for Whisky Glacier where a total mass gain was observed over the period 2009–2015. The cumulative sur- face mass balance values are 0.46 ± 0.36 and 0.11 ± 0.37 m w.e. for Davies Dome, which experienced lower mass gain over the same period. The conversion approach does not affect much the spatial distribution of surface mass balance on glaciers, equilibrium line altitude and accumulation-area ratio. The pattern of the surface mass balance is almost identical in the ablation zone and very similar in the accumulation zone, where the constant conversion factor yields higher surface mass balance values. -

Trip F the PINNACLE HILLS and the MENDON KAME AREA: CONTRASTING MORAINAL DEPOSITS by Robert A
F-1 Trip F THE PINNACLE HILLS AND THE MENDON KAME AREA: CONTRASTING MORAINAL DEPOSITS by Robert A. Sanders Department of Geosciences Monroe Community College INTRODUCTION The Pinnacle Hills, fortunately, were voluminously described with many excellent photographs by Fairchild, (1923). In 1973 the Range still stands as a conspicuous east-west ridge extending from the town of Brighton, at about Hillside Avenue, four miles to the Genesee River at the University of Rochester campus, referred to as Oak Hill. But, for over thirty years the Range was butchered for sand and gravel, which was both a crime and blessing from the geological point of view (plates I-VI). First, it destroyed the original land form shapes which were subsequently covered with man-made structures drawing the shade on its original beauty. Secondly, it allowed study of its structure by a man with a brilliantly analytical mind, Herman L. Fair child. It is an excellent example of morainal deposition at an ice front in a state of dynamic equilibrium, except for minor fluctuations. The Mendon Kame area on the other hand, represents the result of a block of stagnant ice, probably detached and draped over drumlins and drumloidal hills, melting away with tunnels, crevasses, and per foration deposits spilling or squirting their included debris over a more or less square area leaving topographically high kames and esker F-2 segments with many kettles and a large central area of impounded drainage. There appears to be several wave-cut levels at around the + 700 1 Lake Dana level, (Fairchild, 1923). The author in no way pretends to be a Pleistocene expert, but an attempt is made to give a few possible interpretations of the many diverse forms found in the Mendon Kames area. -

Mass-Balance Reconstruction for Kahiltna Glacier, Alaska
Journal of Glaciology (2018), Page 1 of 14 doi: 10.1017/jog.2017.80 © The Author(s) 2018. This is an Open Access article, distributed under the terms of the Creative Commons Attribution licence (http://creativecommons. org/licenses/by/4.0/), which permits unrestricted re-use, distribution, and reproduction in any medium, provided the original work is properly cited. The challenge of monitoring glaciers with extreme altitudinal range: mass-balance reconstruction for Kahiltna Glacier, Alaska JOANNA C. YOUNG,1 ANTHONY ARENDT,1,2 REGINE HOCK,1,3 ERIN PETTIT4 1Geophysical Institute, University of Alaska, Fairbanks, AK, USA 2Applied Physics Laboratory, Polar Science Center, University of Washington, Seattle, WA, USA 3Department of Earth Sciences, Uppsala University, Uppsala, Sweden 4Department of Geosciences, University of Alaska Fairbanks, Fairbanks, AK, USA Correspondence: Joanna C. Young <[email protected]> ABSTRACT. Glaciers spanning large altitudinal ranges often experience different climatic regimes with elevation, creating challenges in acquiring mass-balance and climate observations that represent the entire glacier. We use mixed methods to reconstruct the 1991–2014 mass balance of the Kahiltna Glacier in Alaska, a large (503 km2) glacier with one of the greatest elevation ranges globally (264– 6108 m a.s.l.). We calibrate an enhanced temperature index model to glacier-wide mass balances from repeat laser altimetry and point observations, finding a mean net mass-balance rate of −0.74 − mw.e. a 1(±σ = 0.04, std dev. of the best-performing model simulations). Results are validated against mass changes from NASA’s Gravity Recovery and Climate Experiment (GRACE) satellites, a novel approach at the individual glacier scale. -

Crag-And-Tail Features on the Amundsen Sea Continental Shelf, West Antarctica
Downloaded from http://mem.lyellcollection.org/ by guest on November 30, 2016 Crag-and-tail features on the Amundsen Sea continental shelf, West Antarctica F. O. NITSCHE1*, R. D. LARTER2, K. GOHL3, A. G. C. GRAHAM4 & G. KUHN3 1Lamont-Doherty Earth Observatory, Columbia University, Palisades, New York 10964, USA 2British Antarctic Survey, Natural Environment Research Council, High Cross, Madingley Road, Cambridge CB3 0ET, UK 3Alfred Wegener Institute, Helmholtz Centre for Polar and Marine Research, Am Alten Hafen 26, D-27568 Bremerhaven, Germany 4College of Life and Environmental Sciences, University of Exeter, Rennes Drive, Exeter EX4 4RJ, UK *Corresponding author (e-mail: [email protected]) On parts of glaciated continental margins, especially the inner leads to its characteristic tapering and allows formation of the sec- shelves around Antarctica, grounded ice has removed pre-existing ondary features. Multiple, elongated ridges in the tail could be sedimentary cover, leaving subglacial bedforms on eroded sub- related to the unevenness of the top of the ‘crags’. Secondary, strates (Anderson et al. 2001; Wellner et al. 2001). While the smaller crag-and-tail features might reflect variations in the under- dominant subglacial bedforms often follow a distinct, relatively lying substrate or ice-flow dynamics. uniform pattern that can be related to overall trends in palaeo- While the length-to-width ratio of crag-and-tail features in this ice flow and substrate geology (Wellner et al. 2006), others are case is much lower than for drumlins or elongate lineations, the more randomly distributed and may reflect local substrate varia- boundary between feature classes is indistinct. -

A Strategy for Monitoring Glaciers
COVER PHOTOGRAPH: Glaciers near Mount Shuksan and Nooksack Cirque, Washington. Photograph 86R1-054, taken on September 5, 1986, by the U.S. Geological Survey. A Strategy for Monitoring Glaciers By Andrew G. Fountain, Robert M. Krimme I, and Dennis C. Trabant U.S. GEOLOGICAL SURVEY CIRCULAR 1132 U.S. DEPARTMENT OF THE INTERIOR BRUCE BABBITT, Secretary U.S. GEOLOGICAL SURVEY Gordon P. Eaton, Director The use of firm, trade, and brand names in this report is for identification purposes only and does not constitute endorsement by the U.S. Government U.S. GOVERNMENT PRINTING OFFICE : 1997 Free on application to the U.S. Geological Survey Branch of Information Services Box 25286 Denver, CO 80225-0286 Library of Congress Cataloging-in-Publications Data Fountain, Andrew G. A strategy for monitoring glaciers / by Andrew G. Fountain, Robert M. Krimmel, and Dennis C. Trabant. P. cm. -- (U.S. Geological Survey circular ; 1132) Includes bibliographical references (p. - ). Supt. of Docs. no.: I 19.4/2: 1132 1. Glaciers--United States. I. Krimmel, Robert M. II. Trabant, Dennis. III. Title. IV. Series. GB2415.F68 1997 551.31’2 --dc21 96-51837 CIP ISBN 0-607-86638-l CONTENTS Abstract . ...*..... 1 Introduction . ...* . 1 Goals ...................................................................................................................................................................................... 3 Previous Efforts of the U.S. Geological Survey ................................................................................................................... -

Glacial Processes and Landforms-Transport and Deposition
Glacial Processes and Landforms—Transport and Deposition☆ John Menziesa and Martin Rossb, aDepartment of Earth Sciences, Brock University, St. Catharines, ON, Canada; bDepartment of Earth and Environmental Sciences, University of Waterloo, Waterloo, ON, Canada © 2020 Elsevier Inc. All rights reserved. 1 Introduction 2 2 Towards deposition—Sediment transport 4 3 Sediment deposition 5 3.1 Landforms/bedforms directly attributable to active/passive ice activity 6 3.1.1 Drumlins 6 3.1.2 Flutes moraines and mega scale glacial lineations (MSGLs) 8 3.1.3 Ribbed (Rogen) moraines 10 3.1.4 Marginal moraines 11 3.2 Landforms/bedforms indirectly attributable to active/passive ice activity 12 3.2.1 Esker systems and meltwater corridors 12 3.2.2 Kames and kame terraces 15 3.2.3 Outwash fans and deltas 15 3.2.4 Till deltas/tongues and grounding lines 15 Future perspectives 16 References 16 Glossary De Geer moraine Named after Swedish geologist G.J. De Geer (1858–1943), these moraines are low amplitude ridges that developed subaqueously by a combination of sediment deposition and squeezing and pushing of sediment along the grounding-line of a water-terminating ice margin. They typically occur as a series of closely-spaced ridges presumably recording annual retreat-push cycles under limited sediment supply. Equifinality A term used to convey the fact that many landforms or bedforms, although of different origins and with differing sediment contents, may end up looking remarkably similar in the final form. Equilibrium line It is the altitude on an ice mass that marks the point below which all previous year’s snow has melted. -

Glacier Mass Balance This Summary Follows the Terminology Proposed by Cogley Et Al
Summer school in Glaciology, McCarthy 5-15 June 2018 Regine Hock Geophysical Institute, University of Alaska, Fairbanks Glacier Mass Balance This summary follows the terminology proposed by Cogley et al. (2011) 1. Introduction: Definitions and processes Definition: Mass balance is the change in the mass of a glacier, or part of the glacier, over a stated span of time: t . ΔM = ∫ Mdt t1 The term mass budget is a synonym. The span of time is often a year or a season. A seasonal mass balance is nearly always either a winter balance or a summer balance, although other kinds of seasons are appropriate in some climates, such as those of the tropics. The definition of “year” depends on the measurement method€ (see Chap. 4). The mass balance, b, is the sum of accumulation, c, and ablation, a (the ablation is defined here as negative). The symbol, b (for point balances) and B (for glacier-wide balances) has traditionally been used in studies of surface mass balance of valley glaciers. t . b = c + a = ∫ (c+ a)dt t1 Mass balance is often treated as a rate, b dot or B dot. Accumulation Definition: € 1. All processes that add to the mass of the glacier. 2. The mass gained by the operation of any of the processes of sense 1, expressed as a positive number. Components: • Snow fall (usually the most important). • Deposition of hoar (a layer of ice crystals, usually cup-shaped and facetted, formed by vapour transfer (sublimation followed by deposition) within dry snow beneath the snow surface), freezing rain, solid precipitation in forms other than snow (re-sublimation composes 5-10% of the accumulation on Ross Ice Shelf, Antarctica). -
GLACIER MASS-BALANCE MEASUREMENTS a Manual for Field and Office Work O^ O^C
'' f1 ^^| Geographisches |^ Institut | "| Universitat NHRI Science Report No. 4 VJ Zurich GLACIER MASS-BALANCE MEASUREMENTS A manual for field and office work o^ O^c G. 0strem and M. Brugman NVE NORWEGIAN WATER RESOURCES AND • <j<L • EnvironmenEnvironi t Environnemant ENERGY ADMINISTRATION •^rB Canada Canada PREFACE During the International Hydrological Decade (1965-1975) it was proposed that the hydrology of selected glaciers should be included in National IHD programs, in addition to various other aspects of hydrology. In Scandinavia it was agreed that Denmark should concentrate on low-land hydrology, including ground water; Sweden should emphasize forested basins, including bogs; and Norwegian hydrologists should study alpine hydrology, including glaciers. Representative, basins were then selected in each country, according to this inter-Scandinavian agreement. In Norway, the selected alpine basins did not comprise glaciers, so some of the already observed glaciers were included in the IHD program. In Canada, the Geographical Branch, within the Department of Mines and Technical Surveys, initiated mass-balance studies on selected glaciers along an east-west profile from the National Hydrology Research Institute Rockies to the Coast Mountains. Inland Waters Directorate Canada, and later Norway, felt that glacier field crews and office technicians Conservation and Protection needed written instructions for their work. This would save time at the start of the Environment Canada EHD program, because new activities were planned at several glaciers almost simultaneously. 11 Innovation Boulevard Therefore, a "cookbook" was prepared in Ottawa by Gunnar 0strem and Alan Saskatoon, Saskatchewan Stanley. This first "Manual for Field Work" was printed in the spring of 1966 for Canada S7N 3H5 use during the following field season. -

Glaciers I: Intro, Geology and Mass Balance
T. Perron – 12.001 – Glaciers 1 Glaciers I: Intro, Geology and Mass Balance I. Why study glaciers? • Role in freshwater budget o Fraction of earth’s water that is fresh (non-saline): 3% o Fraction of earth’s freshwater that is ice: ~2/3 o Fraction of earth’s surface covered by ice: ~8% • Climate records, climate effects & feedbacks: more in climate lecture • Postglacial rebound helps constrain mantle viscosity • Major driver of erosion, sediment transport, and landscape evolution • But how important have glaciers been over Earth’s history? o Over very long timescales, there seems to be a rhythm to glaciations . From geologic evidence: 950 Ma, 750, 650, 450, 350-250, 4-? . Proposed to reflect arrangement of continents (supercontinents promote accumulation of continental ice). But we don’t even have a very good record of this beyond a few hundred Myr, let alone precise climate records o We have better records for more recent intervals . Antarctic glaciation began 25 Ma, Greenland 20Ma, Alaska 7Ma. Major Northern hemisphere glaciations began ~4Myr. And this has been the typical climate state since! . Again, more in climate lecture. For now, suffice to say that glacial periods have dominated recent climate history. We’re in an interglacial, the first major one since ~125 ka. And our interglacial is an anomalously warm one. We must remind ourselves of this when examining landforms today. o What was North America like during glacial conditions? During LGM, we know there were . Extensive ice sheets [PPT] . Alpine glaciers in mountains beyond the ice margin . Large glacially-dammed lakes (Missoula, Bonneville) [PPT] . -

Fifty-Year Record of Glacier Change Reveals Shifting Climate in the Pacific Northwest and Alaska, USA
Fifty-Year Record of Glacier Change Reveals Shifting Climate in the Pacific Northwest and Alaska, USA Fifty years of U.S. Geological Survey (USGS) research on glacier change shows recent dramatic shrinkage of glaciers in three climatic Alaska regions of the United States. These long periods of record provide Gulkana clues to the climate shifts that may be driving glacier change. Wolverine The USGS Benchmark Glacier Program began in 1957 as a result Canada of research efforts during the International Geophysical Year (Meier and others, 1971). Annual data collection occurs at three glaciers that represent three climatic regions in the United States: Pacific Ocean South Cascade Glacier in the Cascade Mountains of Washington South Cascade State; Wolverine Glacier on the Kenai Peninsula near Anchorage, United States Alaska; and Gulkana Glacier in the interior of Alaska (fig. 1). Figure 1. The Benchmark Glaciers. Glaciers respond to climate changes by thickening and advancing down-valley towards warmer lower altitudes or by thinning and retreating up-valley to higher altitudes. Glaciers average changes in climate over space and time and provide a picture of climate trends in remote mountainous regions. A qualitative method 1928 1959 for observing these changes is through repeat photography—taking photographs from the same position through time (fig. 2). The most direct way to quantitatively observe changes in a glacier is to measure its mass balance: the difference between the amount of snowfall, or accumulation, on the glacier, and the amount of snow and ice that melts and runs off or is lost as icebergs or water vapor, collectively termed ablation (fig.