Passive Simulation of the Nonlinear Port-Hamiltonian Modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tyrone Jackson, Jazz Piano
KENNESAW STATE UNIVERSITY SCHOOL OF MUSIC Tyrone Jackson Faculty Recital "Tribute to The Fender Rhodes in Jazz" Tyrone Jackson, fender rhodes Karla Harris, vocals Patrick Arthur, electric guitar Brandon Boone, upright and electric bass Chris Burroughs, drums Frankie Quinones, percussion Wednesday, October 18, 2017 at 8 pm Dr. Bobbie Bailey & Family Performance Center, Morgan Hall Twenty-eighth Concert of the 2017-18 Concert Season program This concert is a tribute to the iconic instrument, the Fender Rhodes. The Rhodes piano (also known as the Fender Rhodes piano or simply Fender Rhodes or Rhodes) is an electric piano invented by Harold Rhodes, which became particularly popular throughout the 1970s. CBS oversaw mass production of the Rhodes piano in the 1970s, and it was used extensively through the decade, particularly in jazz, pop, and soul music. The Rhodes became a staple in recordings and live performances for renown keyboard artists Herbie Hancock and Chick Corea. A resurgence of the instrument recently has been realized through jazz musicians Nicholas Payton and Christian Scott. "Tribute to The Fender Rhodes in Jazz" The Backwards Step / Nicholas Payton Scenario / Tyrone Jackson Come Together / Lennon-McCartney Cry Me A River / Arthur Hamilton Benin / Tyrone Jackson By Chance / Tyrone Jackson Take 5 / Desmond-Brubeck Sound of Music / Rodgers-Hammerstein Butterfly / Herbie Hancock Song for Bilbao / Pat Methany Lecturer in Jazz Studies and Jazz Piano yrone Jackson – the name is quickly becoming synonymous with the quintessential jazz piano player. His boundless creativity coupled with subtle accompaniments has Tyrone poised for national recognition. TBorn in the New Orleans cradle of jazz, Jackson embodies the spirit of the Crescent City. -

Real-Time Physical Model of a Wurlitzer and Rhodes Electric Piano
Proceedings of the 20th International Conference on Digital Audio Effects (DAFx-17), Edinburgh, UK, September 5–9, 2017 REAL-TIME PHYSICAL MODEL OF A WURLITZER AND RHODES ELECTRIC PIANO Florian Pfeifle Systematic Musicology, University of Hamburg Hamburg, DE [email protected] ABSTRACT tation methodology as is published in [21]. This work aims at extending the existing physical models of mentioned publications Two well known examples of electro-acoustical keyboards played in two regards by (1) implementing them on a FPGA for real-time since the 60s to the present day are the Wurlitzer electric piano synthesis and (2) making the physical model more accurate when and the Rhodes piano. They are used in such diverse musical gen- compared to physical measurements as is discussed in more detail res as Jazz, Funk, Fusion or Pop as well as in modern Electronic in section 4 and 5. and Dance music. Due to the popularity of their unique sound and timbre, there exist various hardware and software emulations which are either based on a physical model or consist of a sample 2. RELATED WORK based method for sound generation. In this paper, a real-time phys- ical model implementation of both instruments using field pro- Scientific research regarding acoustic and electro-mechanic prop- grammable gate array (FPGA) hardware is presented. The work erties of both instruments is comparably sparse. Freely available presented herein is an extension of simplified models published user manuals as well as patents surrounding the tone production before. Both implementations consist of a physical model of the of the instruments give an overview of basic physical properties of main acoustic sound production parts as well as a model for the both instrument [5]; [7]; [8]; [13]; [4]. -
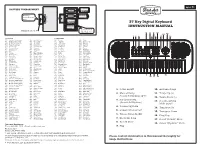
37 Key Digital Keyboard INSTRUCTION MANUAL
ages: 3+ BATTERY COMPARTMENT Battery Compartment Door 37 Key Digital Keyboard INSTRUCTION MANUAL Phillips head screw Insert 4X AA Size Batteries 5 6 7 10 14 13 1 2 4 8 9 11 12 100 SOUNDS 100 RHYTHMS T00 Acoustic Grand Piano T50 Synth Strings 2 R00 Fusion R50 Disco T01 Bright Acoustic Piano T51 Choir Aahs R01 Clup Pop R51 Electro Pop T02 Electric Grand Piano T52 Voice Oohs R02 16 Beat Pop R52 Hip Hop T03 Honky-Tonk Piano T53 Synth Voice R03 8 Beat Pop R53 Rap Pop T04 Rhodes Piano T54 Orchestra Hit R04 8 Beat Soul R54 Techno T05 Chorused Piano T55 Trumpet R05 Pop Rock R55 Trance T06 Harpsichord T56 Trombone R06 60's Soul R56 Funky Disco T07 Clavi T57 Tuba R07 8 Beat Rock R57 Disco Party T08 Celesta T58 Muted Trumpet R08 Funk R58 Disco Samba T09 Glockenspiel T59 French Horn R09 Twist R59 Club Latin T10 Music Box T60 Brass Section R10 British Pop R60 Club Dance T11 Vibraphone T61 Synth Brass 1 R11 Rock Ballad R61 Disco Funk T12 Marimba T62 Synth Brass 2 R12 Limbo Rock R62 Disco Hands T13 Xylophone T63 Soprano Sax R13 Hard Rock R63 Disco Alt T14 Tubular Bells T64 Alto Sax R14 Rock & Roll R64 Saturday Night T15 Dulcimer T65 Tenor Sax R15 Straight Rock R65 Hip Shuffle T16 Drawbar Organ T66 Baritone Sax R16 Jazz Rock R66 Garage T17 Percussive Organ T67 Oboe R17 Schlager Rock R67 UK Pop T18 Rock Organ T68 English Horn R18 Waltz R68 Slow & Easy T19 Church Organ T69 Bassoon R19 Samba R69 Modern Country Pop T20 Reed Organ T70 Clarinet R20 Tango R70 Country Ballad T21 Accordion T71 Piccolo R21 Cha Cha R71 Schlager T22 Harmonica T72 Flute R22 Paso -

0Hthl\L ,'A' L F:,1;Jjj:,',,1
DEEP BLUh E}OBEIY BFIOOM GREG ROCKINGHAM CHRIS FOFIEMAN 0HtHl\l ,'a' L f:,1;jjJ:,',,1 The music of Stevie Wonder left an indelible imprint on the minds of Bobby Broom, Chris Foreman, and Greg Rockingham while they were growing in the 1960s and '70s. Although all three musicians would come to focus on jazz as adults, ratherthan on pop and R&8, Wonder's songs were simply too sophisticated, melodically and harmonically, to forget. With Wondertul!, the Chicago-based Deep Blue Organ Trio's fourth CD and second for Origin Records, guitarist Broom, organist Foreman, and drummer Rockingham pay homage to Wonder with nine of his compositions rendered anew in the jazz organ trio tradition of which they have become among the world's most prominent purveyors. "Stevie was a huge influence on all of us," Broom states. "Most of my close friends were really into music long before I became a musician. I just remember anticipating his next release and everybody running and grabbing them up. Every Stevie release was an event, from Talking Book to Innervisions to Fullfíllingness' First Finale. That period in the early Seventies was monumental in terms of what he gave to us in that generation." Five of the selections on Wonderfull are drawn from the three aforementioned albums: "You've Got It Bad Girl" from L972's Talking Book, "Jesus Children of America" and "Golden Lady" from 1973's Innervisions, and "You Havent Done Nothin"'and "Ain't No Use" from L974's Fullfillingness' First Finale. "As" first appeared on the 1976 album Songs in the Key of Life. -

A Brief History of Piano Action Mechanisms*
Advances in Historical Studies, 2020, 9, 312-329 https://www.scirp.org/journal/ahs ISSN Online: 2327-0446 ISSN Print: 2327-0438 A Brief History of Piano Action Mechanisms* Matteo Russo, Jose A. Robles-Linares Faculty of Engineering, University of Nottingham, Nottingham, UK How to cite this paper: Russo, M., & Ro- Abstract bles-Linares, J. A. (2020). A Brief History of Piano Action Mechanisms. Advances in His- The action mechanism of keyboard musical instruments with strings, such as torical Studies, 9, 312-329. pianos, transforms the motion of a depressed key into hammer swing or jack https://doi.org/10.4236/ahs.2020.95024 lift, which generates sound by striking the string of the instrument. The me- Received: October 30, 2020 chanical design of the key action influences many characteristics of the musi- Accepted: December 5, 2020 cal instrument, such as keyboard responsiveness, heaviness, or lightness, which Published: December 8, 2020 are critical playability parameters that can “make or break” an instrument for a pianist. Furthermore, the color of the sound, as well as its volume, given by Copyright © 2020 by author(s) and Scientific Research Publishing Inc. the shape and amplitude of the sound wave respectively, are both influenced This work is licensed under the Creative by the key action. The importance of these mechanisms is highlighted by Commons Attribution International centuries of studies and efforts to improve them, from the simple rigid lever License (CC BY 4.0). mechanism of 14th-century clavichords to the modern key action that can be http://creativecommons.org/licenses/by/4.0/ found in concert grand pianos, with dozens of bodies and compliant elements. -

EVP88 User Manual
User Manual EVP88 Emagic Vintage Piano 88 March 2001 Software Instruments >> Version 1.0, April 2001 User Manual English >> English Edition E Soft- und Hardware GmbH License Agreement Important! Please read this licence agreement carefully before opening the disk seal! Opening of the disk seal and use of this package indicates your agreement to the following terms and conditions. Emagic grants you a non-exclusive, non-transferable license to use the software in this package. You may: 1. use the software on a single machine. 2. make one copy of the software solely for back-up purposes. You may not: 1. make copies of the user manual or the software except as expressly provided for in this agreement. 2. make alterations or modifications to the software or any copy, or otherwise attempt to discover the source code of the software. 3. sub-license, lease, lend, rent or grant other rights in all or any copy to others. Except to the extent prohibited by applicable law, all implied warranties made by Emagic in connection with this manual and software are limited in duration to the minimum statutory guarantee period in your state or country from the date of original purchase, and no warranties, whether express or implied, shall apply to this product after said period. This warranty is not transferable-it applies only to the original purchaser of the software. Emagic makes no warranty, either express or implied, with respect to this software, its quality, performance, merchantability or fitness for a particular purpose. As a result, this software is sold “as is”, and you, the purchaser, are assuming the entire risk as to quality and performance. -

MUNI 2017-2 – Piano 2 (Women, Electric Piano Etc) 01 Tea for Two
MUNI 2017-2 – Piano 2 (Women, electric piano etc) 01 Tea for Two (Vincent Youmans) 3:14 Art Tatum-solo piano March 21, 1933 78 Brunswick 6553, matrix number B-13162-A / CD Affinity AFS 1035-3 02 Tea for Two (Vincent Youmans) 4:17 Bud Powell-p; Ray Brown-b; Buddy Rich-dr New York City, July 1, 1950 LP Mercury MGC 610, matr. 436-6 / CD Verve 827 901-2 (1988) 03 Oleo (Sonny Rollins) 4:08 Bill Evans-p; Sam Jones-b; Philly Joe Jones-dr New York City, December 15, 1958 LP Riverside RLP 291/1129 / CD Riverside RCD-018-2987) 04 A Night in Tunisia (Dizzy Gillespie) 8:00 Martial Solal-solo piano live at Les Arcs, January 13, 1976 LP 4-Stefanotis PAM 963 (1985) / CD Flat & Sharp 239963 (1986) 05 Liza (George Gershwin) 8:54 Herbie Hancock & Chick Corea-pianos live at Masonic Auditorium, San Francisco / Dorothy Chandler Pavillion, Los Angeles / Golden Hall, San Diego / Hill Auditorium, Ann Arbor, February 1978 LP Columbia PC2 35663 / CD Columbia/Legacy C2K 65551 (1998) 06 The Pearls (Jelly Roll Morton) 1:42 Lil Hardin Armstrong-p; Mae Barnes-snare drum November 26, 1961 NBC-TV, Chicago & All that Jazz youtube 07 The Man I Love (George Gershwin) 3:25 Mary Lou Williams-solo piano live at the Montreux Jazz Festival, Switzerland, July 16, 1978 LP Pablo Live 2308-218 08 Ambiance (Marian McPartland) 4:13 Marian McPartland-p; Christian McBride-b; Jack DeJohnette-dr Nationa Public Radio, December 11, 1992 CD Jazz Alliance TJA-12018 09 Collard Greens and Black-Eyed Peas (Oscar Pettiford) 3:31 Pat Moran (Helen Mudgett)-p; Scott LaFaro-b; Johnny Whited-dr Chicago, December 1957 LP Audio Fidelity AFLP 1875 / CD Fresh Sound FSR-CD 440 (2007) 10 Walking Batteriewoman (Carla Bley) 4:00 Carla Bley-p; Steve Swallow-el. -

Il-Fender-Rodhes.Pdf
IL FENDER RODHES Il piano elettrico della Fender, il Rodhes è un pianoforte elettro-meccanico, inventato da Harold Rhodes nel corso del 1950 e in seguito prodotto in una serie di modelli, prima in collaborazione con Fender e dopo il 1965 dalla CBS. E' costituito da un piano simile a tastiera con martelli che colpiscono denti metallici di piccole dimensioni, amplificato con pickup elettromagnetici. Il piano Rhodes è stato ampiamente utilizzato in tutto il 1970 in tutti gli stili di musica. E' caduto in disuso per un po' nella seconda metà del 1980, principalmente per l'emergere dei sintetizzatori digitali; più tardi, ha goduto di una rinascita enorme e di popolarità dal 1990. Con artisti contemporanei, tra cui Radiohead, Portishead, D'Angelo, Erykah Badu, Chick Corea, Jamiroquai, Herbie Hancock, Steely Dan, The Doors e Stevie Wonder il Rhodes ha riconquistato la sua popolarità. L'ultimo modello, il MK V, è stato proposto sul mercato nel 1984, quando la fabbrica è stata chiusa a Fullerton. La Rhodes Music Corporation ha cercato di reintrodurre una versione dello strumento poi nel 2007. Storia 1946-1965: Harold Rhodes tecnico inventore fonda il Rhodes Piano Corporation e introduce il pre- Piano al NAMM (1946). Nel 1959, Rhodes entrò in una joint venture con Leo Fender per la fabbricazione degli strumenti in una società di nome Fender & Rhodes. La partnership è durata per sei anni con il modello commercializzato Fender Rhodes Piano Bass, a 32 tasti, versione con solo la gamma bassa del pianoforte, che ha rappresentato la maggior parte delle vendite. Il Fender Rhodes Celeste era una tastiera analoga che riguarda la fascia media del pianoforte. -

Non-Linearities of the Mechano-Electrical Tonegenerator of the Hammond Organ ∗†
ISMA 2019 Non-linearities of the mechano-electrical tonegenerator of the Hammond organ ∗y Malte Münster(1), Florian Pfeifle(2) (1)Institute for Systematic Musicology; University of Hamburg, Germany, [email protected] 1 (2)Institute for of Systematic Musicology; University of Hamburg, Germany, florian.pfeifl[email protected] 2 Abstract The Hammond Organ with its electro-magnetic generator is still a standard instrument in the western music world. The organ still fulfils musicians’ demand for a distinctive sonic identity with intuitive control of some arbitrary parameters. Bequeathed a heritage of some hundreds of thousands of tonewheel organs to the world, most of them still in service since the original manufacturer went out of business. The worldwide organ scene remains a vibrant community. A description of the tone production mechanism is presented based on measure- ments of a pre-war Model A. The survey includes high-speed camera measurement and tracking of the generator as well as oscilloscope recordings of single pickups. Some properties emerge due to the interaction of the me- chanical motion of interaction with the magnetic B-H-field. A FEM model of the geometry shows accordance with the proposed effects. A FDM-model is written and a more complex physical model having a special regard on the geometry and electronic parts of the sound production mechanism. Keywords: Sound, Music, Acoustics 1 INTRODUCTION Following the publication of the Wurlitzer and the Rhodes E-Pianos at ISMA 2014, we have a closer look at the unique Hammond Organ with electro-magnetic sound production. It is one of the remaining standard musical instruments in the western world of Jazz-, Rock-, Funk-, Soul-, Gospel-, Reggae-Music and related genres. -

Records on Vinyl Catalogue 2019/2020 Even Today an Analog Recording Pressed in Vinyl Sounds Most Beautiful
records on vinyl catalogue 2019/2020 Even today an analog recording pressed in vinyl sounds most beautiful. (Michael Fetscher) Flavoredtune transforms encounters between extraordinary artists into timeless sonic documents. Scherzinger Claudia by Photo Fried Dähn – Now & Then What is possible in the field of electronic music? What can you get out of a cut- ting-edge e-cello that he helped to develop, from the instrument itself? What possibilities do loop machines, samplers and many other technical innovations offer? The classically trained cellist, who embraces experiment, moves without gravity on his solo (in the true sense of the word) album into the pulsating core of a musical universe that has expanded exponentially in recent years. 12“ Vinyl, 180g | FTR361309 Grooves Kaffee & Kuchen – 11 / 2020 All live recordings at Studio WhiteFir! Featuring Alex Wignall – Joshua Roberts – Philipp van Endert – André Nendza – Christian Kappe – Hadar Noiberg – Olivia Trummer – Dannielle de Andrea – Martin Meixner – Lukas Pfeil – Felipe Silveira – Joel Locher – Eckhard Stromer – Gee Hye Lee – Martin Grünenwald. 12“ Vinyl, 180g | FTR361308 Olivia Trummer/Hadar Noiberg – The Hawk A surprising meeting in Berlin revealed to Hadar Noiberg and Olivia Trummer that they breath music similarly and like to mix their musical upbringing of jazz and classical music with various influences. With the flute and piano extending each other into one unified voice, they create passionate, mysterious and lyrical music which takes the listener on a voyage into their fantastical world. Olivia Trummer - Piano, Vocals Hadar Noiberg - Flutes, FX 12“ Vinyl, 180g / CD | FTR361306 Ulisses Rocha – White Wood Brazilian Artist Ulisses Rocha is one of these few special musicians who will leave a lasting impression on the listener. -

Physical Modeling Organ and Electric Piano
PHYSICAL MODELING ORGAN AND ELECTRIC PIANO USER'S MANUAL Firmware version 1.41 - Hardware rev. C www.Crumar.it CRUMAR MOJO 61 USER'S MANUAL - Page 1/32 Congratulations! You are now the lucky owner of a Crumar Mojo !1" one of the finest digital key#oards of the modern era. $he Mojo !1 is a high %uality instrument that was entirely conceived" develo&ed and #uilt in 'taly with &remium %uality &arts. $his instrument is the the result of years of research in sound design" %uality electronics and has #een assem#led with first class craftsmanshi&. (e wish you many years of enjoyment and good music with your new Mo o !1" and" if we may give you a small &iece of advice... you guessed it... please read this manual in its entirety and kee& it in a safe place for future reference! Have fun! $he Crumar Gang. SAFETY INFORMATION – Do not open the instr!ment. $he instr!ment %an &e opene' an' epai e' on() &y *!alifie' pe sonne(# Una!tho ize' opening -oids the wa ant)# – Do not e/pose the instr!ment to ain o "oistu e# – Do not e/pose the instr!ment to 'i e%t s!nlight# – 0e %a e+!( not to infiltrate po.'e s an' liq!ids inside the instr!ment. No on the o!tside# – 1+ liq!ids get inside the !nit, emo-e the po.e imme'iate() to p e-ent the is3 of ele%t ic sho%k an' %onta%t a se -ice %ente as soon as possible# – Do not %lean !sing a& asive %leane s as they may 'amage the s! fa%e# – Please 3eep a(( pa%3aging in %ase )o! nee' to t anspo t the instr!ment to a se -ice %ente # – $he instr!"ent %an &e !se' in an) Co!nt ) that has a mains -oltage &et.een 100 5a% an' -

Rhodes Active Midi Finished Copy 6:3:10 Pages WORD
Rhodes Mark 7 -73/88 AM Owners Manual Warranty Information Thank you for purchasing your new Rhodes Mark 7 piano! The Rhodes Mark 7 continues the legacy of this legendary American made instrument known for its unique design and tone. The Rhodes Mark 7 has reached a new level of quality and versatility never before seen in the history of Rhodes while still maintaining its purity of design and recognizable tone. The Rhodes piano has long been a favorite of musicians and recording artists worldwide. Our company is extremely proud of our products and guarantees the musician years of reliability and enjoyment. Rhodes Mark 7 Active MIDI Series The Active MIDI Series Rhodes Mark VII piano is available in 2 sizes, 73 and 88 key versions. The new Rhodes Active Midi Series pianos now provide the musician with a user friendly and versatile MIDI system that is state of the art. Combined with our new preamplifier circuitry and side panel connector system, this is the perfect marriage of analog and digital! Active MIDI Series features include: · Patented, highly accurate, sensing technology for exceptional capture of the slightest key movement and velocity · Class compliant USB MIDI – MIDI In, Out and Thru Jacks · Pitch Bend and Modulation Wheels · Polyphonic and Monophonic (Channel) Aftertouch · Continuous Data Pedal Sensoring · 2 X 20 Character Back-lit LCD and Pushbutton Encoder · Midi / USB device Volume Control Piano improvements include: · Ventilated molded case available in stylish colors · Improved action · Improved pedal design for ease of setup and portability · Heavy duty road case available · Powered Speaker Platforms in matching colors and sizes MIDI Side Panel Connections A B C D1 D2 E F G H A.