Real-Time Physical Model of a Wurlitzer and Rhodes Electric Piano
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Overture Digital Piano
Important Safety Instructions 1. Do not use near water. 2. Clean only with dry cloth. 3. Do not block any ventilation openings. 4. Do not place near any heat sources such as radiators, heat registers, stoves, or any other apparatus (including amplifiers) that produce heat. 5. Do not remove the polarized or grounding-type plug. 6. Protect the power cord from being walked on or pinched. 7. Only use the included attachments/accessories. 8. Unplug this apparatus during lightning storms or when unused for a long period of time. 9. Refer all servicing to qualified service personnel. Servicing is required when the apparatus has been damaged in any way, such as when the power-supply cord or plug is damaged, liquid has been spilled or objects have fallen into the apparatus, the apparatus has been exposed to rain or moisture, does not operate normally, or has been dropped. FCC Statements FCC Statements 1. Caution: Changes or modifications to this unit not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment. 2. Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. -

Tyrone Jackson, Jazz Piano
KENNESAW STATE UNIVERSITY SCHOOL OF MUSIC Tyrone Jackson Faculty Recital "Tribute to The Fender Rhodes in Jazz" Tyrone Jackson, fender rhodes Karla Harris, vocals Patrick Arthur, electric guitar Brandon Boone, upright and electric bass Chris Burroughs, drums Frankie Quinones, percussion Wednesday, October 18, 2017 at 8 pm Dr. Bobbie Bailey & Family Performance Center, Morgan Hall Twenty-eighth Concert of the 2017-18 Concert Season program This concert is a tribute to the iconic instrument, the Fender Rhodes. The Rhodes piano (also known as the Fender Rhodes piano or simply Fender Rhodes or Rhodes) is an electric piano invented by Harold Rhodes, which became particularly popular throughout the 1970s. CBS oversaw mass production of the Rhodes piano in the 1970s, and it was used extensively through the decade, particularly in jazz, pop, and soul music. The Rhodes became a staple in recordings and live performances for renown keyboard artists Herbie Hancock and Chick Corea. A resurgence of the instrument recently has been realized through jazz musicians Nicholas Payton and Christian Scott. "Tribute to The Fender Rhodes in Jazz" The Backwards Step / Nicholas Payton Scenario / Tyrone Jackson Come Together / Lennon-McCartney Cry Me A River / Arthur Hamilton Benin / Tyrone Jackson By Chance / Tyrone Jackson Take 5 / Desmond-Brubeck Sound of Music / Rodgers-Hammerstein Butterfly / Herbie Hancock Song for Bilbao / Pat Methany Lecturer in Jazz Studies and Jazz Piano yrone Jackson – the name is quickly becoming synonymous with the quintessential jazz piano player. His boundless creativity coupled with subtle accompaniments has Tyrone poised for national recognition. TBorn in the New Orleans cradle of jazz, Jackson embodies the spirit of the Crescent City. -
Model 6100 Assembly Instructions My First Piano Tutor
Model 6100 Assembly Instructions My First Piano Tutor Schoenhut® Piano Company, 6480B US1 North, Saint Augustine, FL USA Phone 904-810-1945 Fax 904-823-9213 Email [email protected] Website www.toypiano.com “Manufacturer of Toy Pianos since 1872” Schoenhut® Piano Company Page 1 all rights reserved © 2011 Printed in China WARNING! This product must be assembled by an adult prior to play. Unassembled parts may have sharp edges which could cause injury. The piano and bench are designed for use by a child. Inspect the hardware periodically for tightness and integrity, tightening or replacing any loose parts. Parts Piano body Bench seat Piano Crosspiece leg support 7” Bench Legs (two) Piano Legs (two) 6.25” Bench Legs (two) Music Stand Long Screws (ten) Song book and color strip Short Screws (four) Learning System book Barrel Nuts (fourteen) Microphone (one) Pedal (one) Power Adapter (one) Assembly Alert: Hardware is located inside the Styrofoam packing material Step1: Insert barrel nuts into the top portion of the (2) sets of piano legs. Use (2) long screws to attach the piano leg to the piano body. Repeat this for other side. Step 2: Insert (4) barrel nuts into the crosspiece. Use (4) long screws to attach the piece onto the piano legs. Step 3: To put the bench together, you will insert barrel nuts into the holes of each bench leg. Place (1) 7 inch bench leg and (1) 6.25 inch bench leg together so that they make “V” shape. Attach these together using (2) long screws. Do the same for the remaining (2) bench legs. -
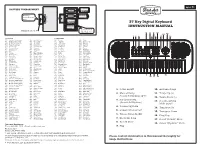
37 Key Digital Keyboard INSTRUCTION MANUAL
ages: 3+ BATTERY COMPARTMENT Battery Compartment Door 37 Key Digital Keyboard INSTRUCTION MANUAL Phillips head screw Insert 4X AA Size Batteries 5 6 7 10 14 13 1 2 4 8 9 11 12 100 SOUNDS 100 RHYTHMS T00 Acoustic Grand Piano T50 Synth Strings 2 R00 Fusion R50 Disco T01 Bright Acoustic Piano T51 Choir Aahs R01 Clup Pop R51 Electro Pop T02 Electric Grand Piano T52 Voice Oohs R02 16 Beat Pop R52 Hip Hop T03 Honky-Tonk Piano T53 Synth Voice R03 8 Beat Pop R53 Rap Pop T04 Rhodes Piano T54 Orchestra Hit R04 8 Beat Soul R54 Techno T05 Chorused Piano T55 Trumpet R05 Pop Rock R55 Trance T06 Harpsichord T56 Trombone R06 60's Soul R56 Funky Disco T07 Clavi T57 Tuba R07 8 Beat Rock R57 Disco Party T08 Celesta T58 Muted Trumpet R08 Funk R58 Disco Samba T09 Glockenspiel T59 French Horn R09 Twist R59 Club Latin T10 Music Box T60 Brass Section R10 British Pop R60 Club Dance T11 Vibraphone T61 Synth Brass 1 R11 Rock Ballad R61 Disco Funk T12 Marimba T62 Synth Brass 2 R12 Limbo Rock R62 Disco Hands T13 Xylophone T63 Soprano Sax R13 Hard Rock R63 Disco Alt T14 Tubular Bells T64 Alto Sax R14 Rock & Roll R64 Saturday Night T15 Dulcimer T65 Tenor Sax R15 Straight Rock R65 Hip Shuffle T16 Drawbar Organ T66 Baritone Sax R16 Jazz Rock R66 Garage T17 Percussive Organ T67 Oboe R17 Schlager Rock R67 UK Pop T18 Rock Organ T68 English Horn R18 Waltz R68 Slow & Easy T19 Church Organ T69 Bassoon R19 Samba R69 Modern Country Pop T20 Reed Organ T70 Clarinet R20 Tango R70 Country Ballad T21 Accordion T71 Piccolo R21 Cha Cha R71 Schlager T22 Harmonica T72 Flute R22 Paso -

Electric Piano Machine Information on Warranty Repairs at [email protected] Or +1-718-937-8300
- WARRANTY INFORMATION - Please register online at http://www.ehx.com/product-registration or complete and return the enclosed warranty card within 10 days of purchase. Electro-Harmonix will repair or replace, at its discretion, a product that fails to operate due to defects in materials or workmanship for a period of one year from date of purchase. This applies only to original purchasers who have bought their product from an authorized Electro- Harmonix retailer. Repaired or replaced units will then be warranted for the unexpired portion of the original warranty term. KEY9 If you should need to return your unit for service within the warranty period, please contact the appropriate office listed below. Customers outside the regions listed below, please contact EHX Customer Service for Electric Piano Machine information on warranty repairs at [email protected] or +1-718-937-8300. USA and Canadian customers: please obtain a Return Authorization Number (RA#) from EHX Customer Service before returning your product. Include with your returned unit: a written description of the problem as well as your name, address, Congratulations on purchasing the Electro-Harmonix KEY9 Electric Piano Machine. The telephone number, e-mail address, and RA#; and a copy of your receipt clearly showing the purchase date. KEY9 transforms the tone of a guitar and/or keyboard into a convincing electric piano emulation, including several variations of the classic Rhodes® and Wurlitzer® sounds. United States & Canada The KEY9 also features lively recreations of vibes, mallets, an organ, and even steel EHX CUSTOMER SERVICE drums! Based on the popular EHX B9 and C9 pedals, the KEY9 swerves into electro- ELECTRO-HARMONIX acoustic territory via knobs that control DRY and KEY volume, as well as preset-specific c/o NEW SENSOR CORP. -

Product Catalog 2017
Nord Keyboards Product Catalog 2017 Catalog Product Keyboards Nord STAGE PIANOS • SYNTHESIZERS • COMBO ORGAN Handmade in Sweden by Clavia DMI AB PRODUCT CATALOG 2017 The Original Red Keyboards The Nord factory is located in the creative area of Stockholm also known as SoFo, in the district of Södermalm. With everything located in the same building, communication between development and production is only a matter of walk- ing a few meters. We are proud to say all our Nord products are assembled by hand and they all go through a series of tough tests to ensure they’ll be ready for a long and happy life ‘on the road’. CONTENTS STAGE PIANOS NORD STAGE 3 6 NEW NORD PIANO 3 16 NORD ELECTRO 5 22 SYNTHESIZERS NORD LEAD A1 30 NORD LEAD 4 38 NORD DRUM 3P 46 COMBO ORGAN NORD C2D 50 SOUND LIBRARIES 58 Manufacturer: Clavia DMI AB, Box 4214, SE-102 65 Stockholm, Sweden Phone: +46 8 442 73 60 | Fax: +46 8 644 26 50 | Email: [email protected] | www.nordkeyboards.com 3 COMPANY HISTORY COMPANY IT ALL STARTED BACK IN 1983... In 1983 founder Hans Nordelius created the Digital introducing stunning emulations of classic vintage Chamberlin. The Electro 3 became one of the most In 2013 we celebrated our 30th anniversary as a musical Percussion Plate 1 – the first drum pad allowing for electro-mechanical instruments with a level of successful products we’ve ever made. instrument company by releasing the Nord Lead 4, Nord dynamic playing using sampled sounds. The DPP1 portability generally not associated with the original In 2010 the streamlined Nord Piano was introduced, Drum 2, Nord Pad and the Nord Piano 2 HP! At NAMM was an instant success and soon thereafter the instruments… a lightweight stage piano that featured advanced 2014 we announced the Nord Lead A1 – our award- brand name ddrum was introduced. -

Jazz Solo Instrument Classification with Convolutional Neural Networks, Source Separation, and Transfer Learning
JAZZ SOLO INSTRUMENT CLASSIFICATION WITH CONVOLUTIONAL NEURAL NETWORKS, SOURCE SEPARATION, AND TRANSFER LEARNING Juan S. Gomez´ Jakob Abeßer Estefan´ıa Cano Semantic Music Technologies Group, Fraunhofer IDMT, Ilmenau, Germany fgomejn,abr,[email protected] ABSTRACT ment classification in ensemble music recordings. In par- ticular, this paper focuses on the identification of predom- Predominant instrument recognition in ensemble record- inant solo instruments in multitimbral music recordings, ings remains a challenging task, particularly if closely- i. e., the most salient instruments in the audio mixture. This related instruments such as alto and tenor saxophone need assumes that the spectral-temporal envelopes that describe to be distinguished. In this paper, we build upon a recently- the instrument’s timbre are dominant in the polyphonic proposed instrument recognition algorithm based on a hy- mixture [11]. As a particular use-case, we focus on the brid deep neural network: a combination of convolu- classification of solo instruments in jazz ensemble record- tional and fully connected layers for learning character- ings. Here, we study the task of instrument recognition istic spectral-temporal patterns. We systematically eval- both on a class and sub-class level, e. g. between soprano, uate harmonic/percussive and solo/accompaniment source alto, and tenor saxophone. Besides the high timbral sim- separation algorithms as pre-processing steps to reduce the ilarity between different saxophone types, a second chal- overlap among multiple instruments prior to the instrument lenge lies in the large variety of recording conditions that recognition step. For the particular use-case of solo in- heavily influence the overall sound of a recording [21,25]. -

Passive Simulation of the Nonlinear Port-Hamiltonian Modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie
Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie To cite this version: Antoine Falaize, Thomas Hélie. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano. 2016. hal-01390534 HAL Id: hal-01390534 https://hal.archives-ouvertes.fr/hal-01390534 Preprint submitted on 2 Nov 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize1,∗, Thomas H´elie1,∗ Project-Team S3 (Sound Signals and Systems) and Analysis/Synthesis team, Laboratory of Sciences and Technologies of Music and Sound (UMR 9912), IRCAM-CNRS-UPMC, 1 place Igor Stravinsky, F-75004 Paris Abstract This paper deals with the time-domain simulation of an electro-mechanical pi- ano: the Fender Rhodes. A simplified description of this multi-physical system is considered. It is composed of a hammer (nonlinear mechanical component), a cantilever beam (linear damped vibrating component) and a pickup (nonlinear magneto-electronic transducer). The approach is to propose a power-balanced formulation of the complete system, from which a guaranteed-passive simulation is derived to generate physically-based realistic sound synthesis. -

PSR-E233/YPT-230 Owner's Manual
DIGITAL KEYBOARD Owner’s Manual Thank you for purchasing this Yamaha Digital Keyboard! We recommend that you read this manual carefully so that you can fully take advantage of the advanced and convenient functions of the instrument. We also recommend that you keep this manual in a safe and handy place for future reference. Before using the instrument, be sure to read “PRECAUTIONS” on pages 4–5. EN (US only) LIMITED 1-YEAR WARRANTY ON PORTABLE KEYBOARDS (NP, NPV, PSRE, YPG AND YPT SERIES) Thank you for selecting a Yamaha product. Yamaha products are designed and manufactured to provide a high level of defect-free performance. Yamaha Corporation of America (“Yamaha”) is proud of the experience and craftsmanship that goes into each and every Yamaha product. Yamaha sells its products through a network of reputable, specially authorized dealers and is pleased to offer you, the Original Owner, the following Limited Warranty, which applies only to products that have been (1) directly purchased from Yamaha’s authorized dealers in the fifty states of the USA and District of Columbia (the “Warranted Area”) and (2) used exclusively in the Warranted Area. Yamaha suggests that you read the Limited Warranty thoroughly, and invites you to contact your authorized Yamaha dealer or Yamaha Customer Service if you have any questions. Coverage: Yamaha will, at its option, repair or replace the product covered by this warranty if it becomes defective, malfunctions or otherwise fails to conform with this warranty under normal use and service during the term of this warranty, without charge for labor or materials. -

Williams Legato Digital Piano Will Supply You with Years of Musical Enjoyment If You Follow the Suggestions Listed Below
LEGATO digital piano owner's manual LEGATO DIGITAL PIANO CAUTION: TO REDUCE THE RISK OF ELECTRIC SHOCK, DO NOT REMOVE COVER OR BACK. NO USER-SERVICEABLE PARTS INSIDE. REFER SERVICING TO QUALIFIED SERVICE PERSONNEL IMPORTANT SAFETY INSTRUCTIONS Do not use near water. Clean only with a soft, dry cloth. Do not block any ventilation openings. Do not place near any heat sources such as radiators, heat registers, stoves, or any other apparatus (including amplifiers) that produces heat. Protect the power cord from being walked on or pinched. Only use the included attachments/accessories. Unplug this apparatus during lightning storms or when unused for a long period of time. Refer all servicing to qualified service personnel. Servicing is equiredr when the apparatus has been damaged in any way, such as power-supply cord or plug is damaged, liquid has been spilled or objects have fallen into the apparatus, the apparatus has been exposed to rain or moisture, does not operate normally, or has been dropped. FCC STATEMENTS 1) Caution: Changes or modifications to this unit not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment. 2) NOTE: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. -

0Hthl\L ,'A' L F:,1;Jjj:,',,1
DEEP BLUh E}OBEIY BFIOOM GREG ROCKINGHAM CHRIS FOFIEMAN 0HtHl\l ,'a' L f:,1;jjJ:,',,1 The music of Stevie Wonder left an indelible imprint on the minds of Bobby Broom, Chris Foreman, and Greg Rockingham while they were growing in the 1960s and '70s. Although all three musicians would come to focus on jazz as adults, ratherthan on pop and R&8, Wonder's songs were simply too sophisticated, melodically and harmonically, to forget. With Wondertul!, the Chicago-based Deep Blue Organ Trio's fourth CD and second for Origin Records, guitarist Broom, organist Foreman, and drummer Rockingham pay homage to Wonder with nine of his compositions rendered anew in the jazz organ trio tradition of which they have become among the world's most prominent purveyors. "Stevie was a huge influence on all of us," Broom states. "Most of my close friends were really into music long before I became a musician. I just remember anticipating his next release and everybody running and grabbing them up. Every Stevie release was an event, from Talking Book to Innervisions to Fullfíllingness' First Finale. That period in the early Seventies was monumental in terms of what he gave to us in that generation." Five of the selections on Wonderfull are drawn from the three aforementioned albums: "You've Got It Bad Girl" from L972's Talking Book, "Jesus Children of America" and "Golden Lady" from 1973's Innervisions, and "You Havent Done Nothin"'and "Ain't No Use" from L974's Fullfillingness' First Finale. "As" first appeared on the 1976 album Songs in the Key of Life. -
Illustrated Guide to the CP1
Illustrated Guide to the CP1 U.R.G., Pro Audio & Digital Musical Instrument Division, Yamaha Corporation ©2009 Yamaha Corporation WR95750 909 MWDH**-01A0 Printed in Japan +20dB 0dB -20dB 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz +20dB 0dB -20dB 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz Only Yamaha could bring so much to the stage piano: Perfect marriage of keyboard touch and sound was possible only thanks to our extensive knowledge and experience of the building of acoustic pianos. Unrivalled richness of tone is a direct product of our tireless participation in the development of pianos for stage and +20dB recording environments. And against the backdrop of our continued stage-piano 0dB production since introducing the CP70 and CP80 in the -20dB seventies, we have remained loyal to the proud tradition of vintage electric pianos in the recreation of their unique 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz sound. Achieved through uncompromising pursuit of perfection in an instrument that surpasses the sum of its +20dB parts, allow us to present… 0dB The Yamaha CP1 – Ultimate Stage Piano -20dB 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz +20dB 0dB -20dB 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz +20dB 0dB -20dB 10 Hz 10 0 Hz 1. 0 kHz 10 . 0 kHz The CP1 Concept Contents In the CP1, we have recreated the unique sounds not only of acoustic pianos, vintage electric pianos, and synthesizer piano voices, but also of the effect units, amplifiers, and other equipment commonly used with each in actual performance and recording settings.