Remote Sensing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Infrastructure Approval
Infrastructure approval Section 115ZB of the Environmental Planning & Assessment Act 1979 I grant approval to the State significant infrastructure application referred to in schedule 1, subject to the conditions in schedules 2. These conditions are required to: • prevent, minimise, and/or offset adverse environmental impacts including economic and social impacts; • set standards and performance measures for acceptable environmental performance; • require regular monitoring and reporting; and • provide for the ongoing environmental management of the SSI. The Hon Pru Goward MP Minister for Planning Sydney 2015 SCHEDULE 1 Application no.: SSI-6136 Proponent: Roads and Maritime Services Approval Authority: Minister for Planning Land: Land in the suburbs of Hornsby, North Wahroonga, Wahroonga, Normanhurst, Thornleigh, Pennant Hills, Beecroft, West Pennant Hills, Carlingford, North Rocks, Northmead and Baulkham Hills State Significant Infrastructure: Development for the purposes of the NorthConnex project being a new multi-lane road link between the M1 Pacific Motorway (formerly the F3 Sydney–Newcastle Expressway) at North Wahroonga and the Hills M2 Motorway at Baulkham Hills, including: ▪ construction and operation of two road tunnels for traffic traveling north - south between the M1 Pacific Motorway and the Hills M2 Motorway; ▪ M2 integration works; ▪ construction of access points and improvements to intersections and interchanges in the vicinity of NorthConnex; ▪ construction of ventilation facilities; ▪ motorway control centre; and ▪ 11 -

Chapter 4 – Strategic Context and Project Need
Chapter 4 – Strategic context and project need 4 Strategic context and project need 4.1 Current issues with the road network 4.1.1 Traffic congestion across Greater Sydney Traffic growth is forecast across NSW and will include around one million extra road users in Sydney within the next decade and nearly twice the freight movements by 2031. Congestion across metropolitan Sydney is estimated to cost up to $6.1 billion per annum, rising to $12.6 billion by 2030 if nothing is done1. Travel by road is the dominant transport mode in Sydney. Even with high growth in rail freight and public transport, road travel is predicted to continue to be the most dominant travel choice for at least the next 20 years2. Traffic congestion impacts communities and businesses by: • Affecting Sydney’s large and significant freight, service and business operations • Reducing the reliability of, and accessibility to, public transport • Constraining the movement of pedestrians and cyclists • Reducing amenity for nearby residents, pedestrians, cyclists and sensitive land uses (educational and health facilities). 4.1.2 Missing regional motorway link In Sydney’s South District (which includes the Canterbury-Bankstown, Georges River and Sutherland LGAs), over 50 per cent of journeys are undertaken by car. There is currently no motorway between the existing M1 Princes Motorway south of Waterfall and the Sydney motorway network. All local and through traffic, including heavy vehicle traffic, is currently required to use the arterial road network to travel between Waterfall and Sydney, principally the A1 Princes Highway, the A3 King Georges Road and / or the A6 Heathcote Road / New Illawarra Road. -
Sydney IBX Data Center NSW 2020 Australia [email protected]
IBX TECHNICAL SPECIFICATIONS Unit B, 639 Gardeners Road 1.800.172.417 (Australia) SY1 Mascot, Sydney +61.2.8337.2000 (International) Sydney IBX Data Center NSW 2020 Australia [email protected] EQUINIX SYDNEY DATA CENTERS Equinix helps companies accelerate business performance Parramatta A40 M2 by connecting them to their customers and partners inside the SY6 world’s most networked data centers. Our Sydney International A8 Business Exchange™ (IBX®) data centers consist of seven facilities M4 networked across two campuses to give customers flexibility and A40 redundancy options, with the eighth data center, SY5, targeted to M1 Lidcombe open in the second half of 2019. Our data centers are business A4 Sydney hubs for 730+ companies. Customers can choose from a broad A6 range of network services from 155+ network service providers A22 Surry Hills and interconnect directly to customers and partners in their digital A3 Newtown SY3 supply chain. Marrickville SY1/2 SY8 Our Sydney data centers are where companies can gain direct access to both submarine cable landing station and PoP. Equinix’s SY4 SY5 M5 Mascot M1 Internet Exchange is also the largest network peering platform in M1 A36 the Australian market and our facilities have the largest collection of international and regional networks in Australia. Wollongong SY7 B65 SYDNEY IBX® BENEFITS • Most interconnected data center campus in Australia M1 B65 • Access to 265+ cloud providers (includes direct connection to Berkeley Port Kembla A1 AWS, Microsoft Azure, Google Compute and Oracle -
Victorian Class 2 & 3 Higher Mass Limits Route Access
VICTORIAN CLASS 2 & 3 HIGHER MASS LIMITS ROUTE ACCESS LISTS FEBRUARY 2014 This is a list of roads that may be used by vehicles that are eligible to operate at Higher Mass Limits (HML). However, drivers of B-double combinations may not use a road listed in this document: if it is a prohibited arterial road listed in Table A of the Victorian Class 2 B-double Route Access Lists (February 2014) ; or if it is a prohibited structure listed in Table B of the Victorian Class 2 B-double Route Access Lists (February 2014); or if it is not an approved municipal road listed in Table C or Table D of the Victorian Class 2 B-double Route Access Lists (February 2014). The Victorian Class 2 B-double Route Access Lists (February 2014) can be found on the VicRoads website at: vicroads.vic.gov.au/Home/Moreinfoandservices/HeavyVehicles/AccessAndRouteInformation/ TABLE A – PROHIBITED ARTERIAL ROADS WHICH HML TRUCKS MUST NOT USE (Including roads with prohibited bridges) ROAD MUNICIPALITY Ararat-St.Arnaud Road, between Buangor-Ben Nevis Road Ararat and Pyrenees and Wright Street Barkers Road, between Yarra River and Church Street Booroondara Benalla-Winton Road (Bridge Street), between Midland Highway Benalla (Nunn Street) and Benalla-Tatong Road (Smythe Street) Benalla-Yarrawonga Road, between St.James Road Moira and Lake Rowan Road Burwood Road, between Power Street and Church Street Booroondara Clunes–Creswick Road Hepburn and Ballarat Dohertys Road, between Grieve Parade and Fitzgerald Road Wyndham Gisborne–Melbourne Road, between Gisborne-Kilmore Road -

Sydney IBX® Data Center NSW 2015 Australia [email protected]
IBX TECHNICAL SPECIFICATIONS Unit B, 200 Bourke Road 1.800.172.417 (Australia) SY5 Alexandria, Sydney +61.2.8337.2000 (International) Sydney IBX® Data Center NSW 2015 Australia [email protected] EQUINIX SYDNEY DATA CENTERS Equinix is the world’s digital infrastructure company. Digital leaders Parramatta A40 M2 harness our trusted platform to bring together and interconnect the SY6 foundational infrastructure that powers their success. Our Sydney A8 International Business Exchange™ (IBX) data centers consist of M4 eight facilities networked across two campuses to give customers A40 flexibility and redundancy options. Our data centers are business M1 Lidcombe hubs for 765+ companies. Customer can access the broadest A4 Sydney range of cloud services and the largest collection of international A6 and regional network service providers in Australia. A22 Surry Hills A3 Newtown SY3 Our Sydney data centers also allow customers to take advantage Marrickville of peering opportunities with direct access to the largest peering SY1/2 SY8 platform in Australia, and access to key subsea cable facilities— Hawaiki Cable, Southern Cross Cable, PIPE Pacific Cable. SY4 SY5 M5 Mascot M1 M1 A36 SYDNEY IBX BENEFITS • Most interconnected data center campus in Australia Wollongong • Access to 290+ cloud providers (includes direct connection to SY7 B65 AWS, Microsoft Azure, Google Compute and Oracle Cloud) via Equinix Fabric™ M1 B65 • Equinix Internet Exchange™ is the largest network peering Berkeley Port Kembla A1 platform in the Australian market • Access -

Ku-Ring-Gai Chase National Park Parramatta Chatswood Hornsby
4 5 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 MARAYLYA PALM BEACH Berowra Station COTTAGE POINT ARCADIA << To Blue Mountains BEROWRA BEROWRA VALLEY NATIONAL PARK 50 min PACIFIC HIGHWAY Asquith Station Townhall Station KU-RING-GAI CHASE NATIONAL PARK Asquith Station 20 min Eastwood Station KENTHURST ASQUITH RIVERSTONE ROUSE HILL Asquith Station TERREY HILLS HORNSBY 5KM Hornsby Station 10MIN KELLYVILLE MARSDEN PARK WAHROONGA NORWEST NORTH CONNEX BUSINESS PARK CASTLE HILL BELLA VISTA FRENCHS FOREST 10KM DEE WHY Epping Station 25MIN BLACKTOWN Gordon Station M2 EPPING Eastwood Station CHATSWOOD MACQUARIE PARK Chatswood Station PARRAMATTA 15KM MANLY 30MIN RYDE Rhodes Station North Sydney Station MERRYLANDS M4 WETHERILL PARK M7 20KM Strathfield Station 35MIN Proposed Western Sydney Airport LIDCOMBE SYDNEY CBD Townhall Station Burwood Station CABRAMATTA Central Station BURWOOD Redfern Station RANDWICK BANKSTOWN MASCOT LIVERPOOL Sydney Airport 30KM 45MIN M1 30 31 ASQUITH HORNSBY EASY NORTH WAHROONGA TRAVEL PACIFIC HIGHWAY THE CITY AT YOUR FINGERTIPS WAITARA 4km Live in the picturesque suburb of Asquith. NORMANHURST Known for its quiet greenery, your address is nestled between beautiful Ku-ring-gai WAHROONGA Boundary Road ST. IVES Chase National Park on the one end, and THORNLEIGH the cosmopolitan convenience of Hornsby CBD on the other. WARRAWEE Working professionals will beCastle glad Hill Road to know that home is only a short stroll to Asquith TURRAMURRA PACIFIC HIGHWAY Station, and is well serviced by train and PENNANT HILLS NORTHCONNEX 8km buses to and from Hornsby CBD. Drivers may find joy that the recently SOUTH PYMBLE completed NorthConnex brings the entire PENNANT HILLS ROAD TURRAMURRA BEECROFT city ever closer to home, and reduces noise as well as improves air quality for residents Beecroft Road GORDON in the region. -

Westconnex Sale Tips Asset Recycling Model Into Overdrive by ANGUS FOLEY and ACHAL GUPTA
ISSUE 12: OCTOBER 2018 NSW GOVERNMENT EFFECTS MAJOR ASSET PRIVATISATION: WestConnex sale tips Asset Recycling Model into overdrive BY ANGUS FOLEY AND ACHAL GUPTA ALSO IN THIS ISSUE: Emerging trends in Asia: New models for New options for German infrastructure financing infrastructure investment in funding: First financing by institutional south and southeast Asia investors of regional passenger rail BY HARRIET GRAY AND ALEXIS ROSENBERG network reaches financial close BY DERK OPITZ, HOLGER MLYNEK AND Chocks away!: Privatisation of Aéroports ALEXANDRA HEITMANN de Paris gets ready for take-off Waste-to-wealth initiatives: Have we BY MICHEL LEQUIEN AND JACQUES DABRETEAU reached a tipping point? Investing in Saudi Arabia: Key areas of BY MICHAEL HARRISON, RICHARD GUIT, Saudi law and dispute resolution RATHA NABANIDHAM AND MARK DISNEY BY DR FAISAL BAASSIRI, DYFAN OWEN AND Waste not, want not: Energy-from-Waste JAMES MACDONALD refinancings – the opportunities and challenges BY CAMERON SMITH AND PATRICK BOYLE An overview of this issue I am delighted to introduce this twelfth issue of InfraRead, our biannual publication covering a range of legal and transactional issues relevant to the global transport and infrastructure space. Mark Elsey Partner, London T +44 (0)20 7859 1721 [email protected] 2 InfraRead | ISSUE 12 Contents In this issue we look at: NSW Government effects major asset privatisation: Investing in Saudi Arabia: Key areas of WestConnex sale tips Asset Recycling Model Saudi law and dispute resolution p19 into overdrive p4 Saudi Arabia's "Vision 2030" sets out the Saudi government's road map The New South Wales (NSW) state government has recently for diversifying its economy and addressing the challenges brought completed the sale of a 51 per cent interest in the concession- about by low global energy prices. -

Sydney IBX® Data Center NSW, Australia [email protected]
IBX TECHNICAL SPECIFICATIONS 1.800.172.417 (Australia) SY6 Silverwater +61.2.8337.2000 (International) Sydney IBX® Data Center NSW, Australia [email protected] EQUINIX SYDNEY DATA CENTERS Equinix is the world’s digital infrastructure company. Digital leaders Parramatta A40 M2 harness our trusted platform to bring together and interconnect the SY6 foundational infrastructure that powers their success. Our Sydney A8 International Business Exchange™ (IBX) data centers consist of M4 eight facilities networked across two campuses to give customers A40 flexibility and redundancy options. Our data centers are business M1 Lidcombe hubs for 765+ companies. Customer can access the broadest A4 Sydney range of cloud services and the largest collection of international A6 and regional network service providers in Australia. A22 Surry Hills A3 Newtown SY3 Our Sydney data centers also allow customers to take advantage Marrickville of peering opportunities with direct access to the largest peering SY1/2 SY8 platform in Australia, and access to key subsea cable facilities— Hawaiki Cable, Southern Cross Cable, PIPE Pacific Cable. SY4 SY5 M5 Mascot M1 M1 A36 SYDNEY IBX BENEFITS • Most interconnected data center campus in Australia Wollongong • Access to 290+ cloud providers (includes direct connection to SY7 B65 AWS, Microsoft Azure, Google Compute and Oracle Cloud) via Equinix Fabric™ M1 B65 • Equinix Internet Exchange™ is the largest network peering Berkeley Port Kembla A1 platform in the Australian market • Access market participants and financial -
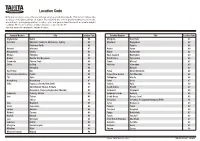
Location Code
Location Code Different locations across the world have varying gravitational pulls. This in turn affects the accuracy of weight readings on scales. By selecting the correct gravity setting on your scale according to your geographical location, you are guaranteed the most accurate weight readings. The scale’s default gravity setting is Location Code A7. See the instruction manual to set the location. Country/Region City Location Code Country/Region City Location Code Afghanistan Kabul A5 Mongolia Ulan Bator A3 Australia Adelaide, Canberra, Melbourne, Sydney A5 Myanmar Naypyidaw A7 Brisbane, Perth A6 Yangon A8 Bahrain Manama A7 Nauru Yaren A9 Bangladesh Dhaka A7 Nepal Kathmandu A6 Bhutan Thimphu A6 New Zealand Wellington A4 Brunei Bandar Seri Begawan A9 North Korea Pyongyang A4 Cambodia Phnom Penh A8 Oman Muscat A7 China Beijing A4 Pakistan Islamabad A5 Shanghai A6 Karachi A7 East Timor Dili A8 Palau Koror, Melekeok A8 Federated States of Micronesia Palikir A8 Papua New Guinea Port Moresby A8 Fiji Suva A8 Philippines Manila A8 Hong Kong Hong Kong A7 Qatar Doha A7 India Jaipur, Lucknow, New Delhi A6 Samoa Apia A8 Ahmedabad, Bhopal, Kolkata A7 Saudi Arabia Riyadh A7 Bangalore, Chennai, Hyderabad, Mumbai A8 Singapore Singapore A9 Indonesia Jakarta, Medan A9 Solomon Islands Honiara A8 Iran Tehran A5 South Korea Busan, Seoul A5 Shiraz A6 Sri Lanka Colombo, Sri Jayawardenepura Kotte A8 Iraq Baghdad A5 Syria Damascus A5 Israel Jerusalem A6 Taiwan Taipei A7 Jordan Amman A6 Thailand Bangkok A8 Kiribati Tarawa A9 Tonga Nuku'alofa A7 Kuwait Kuwait A6 Tuvalu Funafuti A8 Laos Vientiane A8 United Arab Emirates Abu Dhabi A7 Lebanon Beirut A5 Vanuatu Port Vila A8 Malaysia Kuala Lumpur A9 Vietnam Hanoi A7 Maldives Male A9 Yemen Sanaa A8 Marshall Islands Majuro A8 ©2014 TANITA Corporation RD9017621(0) - 1410FA A2 A2 A3 A3 A4 A4 A5 A5 A6 A6 A7 A7 A8 A8 A9 A9 A8 A8 A7 A7 A6 A6 A5 A5 A4 A4 A3 A3. -
The Metropolitan Plan Summary of Strategic Directions, Objectives & Actions
The Metropolitan Plan Summary of Strategic Directions, Objectives & Actions METROPOLITAN PLAN FOR SYDNEY 2036 | PAGE 233 STRATEGIC DIRECTION A Strengthening the City of Cities OBJECTIVE A1 To PROMOTE REGIONAL CITIES TO UNDERPIN SUSTAINABLE GROWTH IN A MULTI–CENTRED CITY A1.1 Prepare and implement Regional City economic development plans with local councils OBJECTIVE A2 TO ACHIEVE A coMPacT, coNNECTED, MULTI–CENTRED AND INCREasINGLY NETWORKED CITY STRUCTURE A2.1 Consider consistency with the City of Cities structure when assessing alternative land use, infrastructure and service delivery investment decisions A2.2 Ensure a long term focus on creating a networked rail and road system between Sydney and Parramatta to extend the global arc of economic activity to include Parramatta, Sydney Olympic Park and Rhodes OBJECTIVE A3 To CONTAIN THE URBAN FooTPRINT AND acHIEVE A BALANCE BETWEEN GREENFIELDS GROWTH AND RENEWAL IN EXISTING URBAN AREas OBJECTIVE A4 To coNTINUE STRENGTHENING SYDNEY’S caPacITY TO ATTRacT AND RETAIN GLOBAL BUSINEssES AND INVESTMENT A4.1 Protect commercial core areas in key Strategic Centres to ensure capacity for companies engaged in global trade, services and investment, and to ensure employment targets can be met OBJECTIVE A5 To STRENGTHEN SYDNEY’S ROLE as A HUB FOR NSW, AUSTRALIA AND SOUTH EasT ASIA THROUGH BETTER coMMUNIcaTIONS AND TRANSPORT coNNECTIONS OBJECTIVE A6 To STRENGTHEN SYDNEY’S PosITION as A coNTEMPORARY, GLOBAL TOURISM DESTINATION A6.1 Improve the integration of tourist precincts with the regular fabric and -

F3 to Sydney Orbital Link Study
F 3 T O S Y D N E Y O R B I T A L L I N K S T U D Y s u m m a r y r e p o r t february 2004 Part A Summary Foreword Contents This is the summary report on a study to identify a preferred option for a new National Highway link through Introduction.....................................................................2 northern Sydney between the F3 Sydney to Newcastle The Current Situation .....................................................3 Freeway and the Sydney Orbital. Key Issues of Growth and Sustainability ........................5 The new link is intended to replace the existing interim National Highway, which runs along Pennant Hills Road. Rail Freight and Public Transport ...................................7 Pennant Hills Road suffers from traffic congestion and Need for a New Link and Its Objectives .........................8 high crash rates as well as causing severe amenity impacts for adjacent residents. The new link is intended Options Development and the Corridor Types .............10 to be constructed after the Westlink M7 opens. Transport Assessment of Corridor Types A, B and C...12 Consultants Sinclair Knight Merz were commissioned in Social Effects Assessment of Corridor Types A, B early 2002 to carry out the study for the Australian and C ......................................................................14 Government. The NSW Roads and Traffic Authority (RTA) managed the study. The study team reported to a Environmental Assessment of Corridor Types A, B Steering Committee of the Department of Transport and and C ......................................................................15 Regional Services (DOTARS), the RTA and the NSW Department of Transport, now Department of Economic Assessment of Corridor Types A, B and C ..17 Infrastructure, Planning and Natural Resources (DIPNR). -

Transurban-Westconnex Date Received: 23 May 2021
Submission No 33 INQUIRY INTO ROAD TOLLING REGIMES Organisation: Transurban-WestConnex Date Received: 23 May 2021 NSW Legislative Council Inquiry into Road Tolling Regimes Portfolio Committee No 6 Transport and Customer Service 23 May 2021 Portfolio Committee No 6 Transport and Customer Service—May 2021 01 Supporting NSW economy >$13B $35.8B invested into Sydney’s in economic benefits motorway network by over 30 years1 Transurban and partners since 2013 Value for customers2 Up to Approximately 56 minutes 60% 40% 75% 290 <$10 travel-time savings on afternoon increase in reduction in of toll road users incidents managed average weekly peak westbound M4 travel-time crashes on believe toll roads per week on our consumer savings on M5 East provide a more network customer spend M5 East direct route What Sydneysiders are saying about toll roads The incident response crew even helped us change It took me 14 minutes from Wattle Street our tyre, right before a rainstorm hit. It was the end Haberfield to Cumberland Highway of their shift and they went over and above to make Greystanes. Never thought I would see sure we were safe. this in my lifetime. NorthConnex customer M4 customer 1. Benefits of toll roads accelerated delivery by the private sector. Economic Contribution of Sydney’s Toll Roads. KPMG, May 2021 2. Survey conducted by JWS Research in April 2021 of 1,000 residents in Greater Metropolitan Sydney NSW Legislative Council Inquiry into Road Tolling Regimes 40,000 300 people involved in $350M Western Sydney WestConnex project into operating