Guidance Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

___... -.:: GEOCITIES.Ws
__ __ _____ _____ _____ _____ ____ _ __ / / / / /_ _/ / ___/ /_ _/ / __ ) / _ \ | | / / / /__/ / / / ( ( / / / / / / / /_) / | |/ / / ___ / / / \ \ / / / / / / / _ _/ | _/ / / / / __/ / ____) ) / / / /_/ / / / \ \ / / /_/ /_/ /____/ /_____/ /_/ (_____/ /_/ /_/ /_/ _____ _____ _____ __ __ _____ / __ ) / ___/ /_ _/ / / / / / ___/ / / / / / /__ / / / /__/ / / /__ / / / / / ___/ / / / ___ / / ___/ / /_/ / / / / / / / / / / /___ (_____/ /_/ /_/ /_/ /_/ /_____/ _____ __ __ _____ __ __ ____ _____ / ___/ / / / / /_ _/ / / / / / _ \ / ___/ / /__ / / / / / / / / / / / /_) / / /__ / ___/ / / / / / / / / / / / _ _/ / ___/ / / / /_/ / / / / /_/ / / / \ \ / /___ /_/ (_____/ /_/ (_____/ /_/ /_/ /_____/ A TIMELINE OF THE MULTIVERSE Version 1.21 By K. Bradley Washburn "The Historian" ______________ | __ | | \| /\ / | | |/_/ / | | |\ \/\ / | | |_\/ \/ | |______________| K. Bradley Washburn HISTORY OF THE FUTURE Page 2 of 2 FOREWARD Relevant Notes WARNING: THIS FILE IS HAZARDOUS TO YOUR PRINTER'S INK SUPPLY!!! [*Story(Time Before:Time Transpired:Time After)] KEY TO ABBREVIATIONS AS--The Amazing Stories AST--Animated Star Trek B5--Babylon 5 BT--The Best of Trek DS9--Deep Space Nine EL--Enterprise Logs ENT--Enterprise LD--The Lives of Dax NE--New Earth NF--New Frontier RPG--Role-Playing Games S.C.E.--Starfleet Corps of Engineers SA--Starfleet Academy SNW--Strange New Worlds sQ--seaQuest ST--Star Trek TNG--The Next Generation TNV--The New Voyages V--Voyager WLB—Gateways: What Lay Beyond Blue italics - Completely canonical. Animated and live-action movies, episodes, and their novelizations. Green italics - Officially canonical. Novels, comics, and graphic novels. Red italics – Marginally canonical. Role-playing material, source books, internet sources. For more notes, see the AFTERWORD K. Bradley Washburn HISTORY OF THE FUTURE Page 3 of 3 TIMELINE circa 13.5 billion years ago * The Big Bang. -
![Arxiv:2010.13762V1 [Astro-Ph.EP] 26 Oct 2020](https://docslib.b-cdn.net/cover/3118/arxiv-2010-13762v1-astro-ph-ep-26-oct-2020-523118.webp)
Arxiv:2010.13762V1 [Astro-Ph.EP] 26 Oct 2020
Draft version October 27, 2020 Typeset using LATEX default style in AASTeX63 A Framework for Relative Biosignature Yields from Future Direct Imaging Missions Noah W. Tuchow 1 and Jason T. Wright 1 1Department of Astronomy & Astrophysics and Center for Exoplanets and Habitable Worlds and Penn State Extraterrestrial Intelligence Center 525 Davey Laboratory The Pennsylvania State University University Park, PA, 16802, USA ABSTRACT Future exoplanet direct imaging missions, such as HabEx and LUVOIR, will select target stars to maximize the number of Earth-like exoplanets that can have their atmospheric compositions charac- terized. Because one of these missions' aims is to detect biosignatures, they should also consider the expected biosignature yield of planets around these stars. In this work, we develop a method of computing relative biosignature yields among potential target stars, given a model of habitability and biosignature genesis, and using a star's habitability history. As an illustration and first application of this method, we use MESA stellar models to calculate the time evolution of the habitable zone, and examine three simple models for biosignature genesis to calculate the relative biosignature yield for different stars. We find that the relative merits of K stars versus F stars depend sensitively on model choice. In particular, use of the present-day habitable zone as a proxy for biosignature detectability favors young, luminous stars lacking the potential for long-term habitability. Biosignature yields are also sensitive to whether life can arise on Cold Start exoplanets that enter the habitable zone after formation, an open question deserving of more attention. Using the case study of biosignature yields calculated for θ Cygni and 55 Cancri, we find that robust mission design and target selection for HabEx and LUVOIR depends on: choosing a specific model of biosignature appearance with time; the terrestrial planet occurrence rate as a function of orbital separation; precise knowledge of stellar properties; and accurate stellar evolutionary histories. -
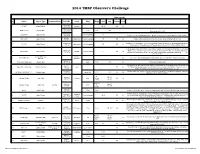
2014 Observers Challenge List
2014 TMSP Observer's Challenge Atlas page #s # Object Object Type Common Name RA, DEC Const Mag Mag.2 Size Sep. U2000 PSA 18h31m25s 1 IC 1287 Bright Nebula Scutum 20'.0 295 67 -10°47'45" 18h31m25s SAO 161569 Double Star 5.77 9.31 12.3” -10°47'45" Near center of IC 1287 18h33m28s NGC 6649 Open Cluster 8.9m Integrated 5' -10°24'10" Can be seen in 3/4d FOV with above. Brightest star is 13.2m. Approx 50 stars visible in Binos 18h28m 2 NGC 6633 Open Cluster Ophiuchus 4.6m integrated 27' 205 65 Visible in Binos and is about the size of a full Moon, brightest star is 7.6m +06°34' 17h46m18s 2x diameter of a full Moon. Try to view this cluster with your naked eye, binos, and a small scope. 3 IC 4665 Open Cluster Ophiuchus 4.2m Integrated 60' 203 65 +05º 43' Also check out “Tweedle-dee and Tweedle-dum to the east (IC 4756 and NGC 6633) A loose open cluster with a faint concentration of stars in a rich field, contains about 15-20 stars. 19h53m27s Brightest star is 9.8m, 5 stars 9-11m, remainder about 12-13m. This is a challenge obJect to 4 Harvard 20 Open Cluster Sagitta 7.7m integrated 6' 162 64 +18°19'12" improve your observation skills. Can you locate the miniature coathanger close by at 19h 37m 27s +19d? Constellation star Corona 5 Corona Borealis 55 Trace the 7 stars making up this constellation, observe and list the colors of each star asterism Borealis 15H 32' 55” Theta Corona Borealis Double Star 4.2m 6.6m .97” 55 Theta requires about 200x +31° 21' 32” The direction our Sun travels in our galaxy. -

Gaia Data Release 2 Special Issue
A&A 623, A110 (2019) Astronomy https://doi.org/10.1051/0004-6361/201833304 & © ESO 2019 Astrophysics Gaia Data Release 2 Special issue Gaia Data Release 2 Variable stars in the colour-absolute magnitude diagram?,?? Gaia Collaboration, L. Eyer1, L. Rimoldini2, M. Audard1, R. I. Anderson3,1, K. Nienartowicz2, F. Glass1, O. Marchal4, M. Grenon1, N. Mowlavi1, B. Holl1, G. Clementini5, C. Aerts6,7, T. Mazeh8, D. W. Evans9, L. Szabados10, A. G. A. Brown11, A. Vallenari12, T. Prusti13, J. H. J. de Bruijne13, C. Babusiaux4,14, C. A. L. Bailer-Jones15, M. Biermann16, F. Jansen17, C. Jordi18, S. A. Klioner19, U. Lammers20, L. Lindegren21, X. Luri18, F. Mignard22, C. Panem23, D. Pourbaix24,25, S. Randich26, P. Sartoretti4, H. I. Siddiqui27, C. Soubiran28, F. van Leeuwen9, N. A. Walton9, F. Arenou4, U. Bastian16, M. Cropper29, R. Drimmel30, D. Katz4, M. G. Lattanzi30, J. Bakker20, C. Cacciari5, J. Castañeda18, L. Chaoul23, N. Cheek31, F. De Angeli9, C. Fabricius18, R. Guerra20, E. Masana18, R. Messineo32, P. Panuzzo4, J. Portell18, M. Riello9, G. M. Seabroke29, P. Tanga22, F. Thévenin22, G. Gracia-Abril33,16, G. Comoretto27, M. Garcia-Reinaldos20, D. Teyssier27, M. Altmann16,34, R. Andrae15, I. Bellas-Velidis35, K. Benson29, J. Berthier36, R. Blomme37, P. Burgess9, G. Busso9, B. Carry22,36, A. Cellino30, M. Clotet18, O. Creevey22, M. Davidson38, J. De Ridder6, L. Delchambre39, A. Dell’Oro26, C. Ducourant28, J. Fernández-Hernández40, M. Fouesneau15, Y. Frémat37, L. Galluccio22, M. García-Torres41, J. González-Núñez31,42, J. J. González-Vidal18, E. Gosset39,25, L. P. Guy2,43, J.-L. Halbwachs44, N. C. Hambly38, D. -

8603517.PDF (12.42Mb)
Umversify Microfilins International 1.0 12.5 12.0 LI 1.8 1.25 1.4 1.6 MICROCOPY RESOLUTION TEST CHART NATIONAL BUREAU OF STANDARDS STANDARD REFERENCE MATERIAL 1010a (ANSI and ISO TEST CHART No. 2) University Microfilms Inc. 300 N. Zeeb Road, Ann Arbor, MI 48106 INFORMATION TO USERS This reproduction was made from a copy of a manuscript sent to us for publication and microfilming. While the most advanced technology has been used to pho tograph and reproduce this manuscript, the quality of the reproduction is heavily dependent upon the quality of the material submitted. Pages in any manuscript may have indistinct print. In all cases the best available copy has been filmed. The following explanation of techniques is provided to help clarify notations which may appear on this reproduction. 1. Manuscripts may not always be complete. When it is not possible to obtain missing pages, a note appears to indicate this. 2. When copyrighted materials are removed from the manuscript, a note ap pears to indicate this. 3. Oversize materials (maps, drawings, and charts) are photographed by sec tioning the original, beginning at the upper left hand comer and continu ing from left to right in equal sections with small overlaps. Each oversize page is also filmed as one exposure and is available, for an additional charge, as a standard 35mm slide or in black and white paper format.* 4. Most photographs reproduce acceptably on positive microfilm or micro fiche but lack clarify on xerographic copies made from the microfilm. For an additional charge, all photographs are available in black and white standard 35mm slide format. -

Using Asteroseismology to Characterise Exoplanet Host Stars
Using asteroseismology to characterise exoplanet host stars Mia S. Lundkvist, Daniel Huber, Victor Silva Aguirre, and William J. Chaplin Abstract The last decade has seen a revolution in the field of asteroseismology – the study of stellar pulsations. It has become a powerful method to precisely characterise exoplanet host stars, and as a consequence also the exoplanets themselves. This syn- ergy between asteroseismology and exoplanet science has flourished in large part due to space missions such as Kepler, which have provided high-quality data that can be used for both types of studies. Perhaps the primary contribution from aster- oseismology to the research on transiting exoplanets is the determination of very precise stellar radii that translate into precise planetary radii, but asteroseismology has also proven useful in constraining eccentricities of exoplanets as well as the dy- namical architecture of planetary systems. In this chapter, we introduce some basic principles of asteroseismology and review current synergies between the two fields. Mia S. Lundkvist Zentrum fur¨ Astronomie der Universitat¨ Heidelberg, Landessternwarte, Konigstuhl¨ 12, 69117 Hei- delberg, DE, and Stellar Astrophysics Centre, Aarhus University, Ny Munkegade 120, 8000 Aarhus C, DK, e-mail: [email protected] Daniel Huber Institute for Astronomy, University of Hawai‘i, 2680 Woodlawn Drive, Honolulu, HI 96822, US and Sydney Institute for Astronomy, School of Physics, University of Sydney, NSW 2006, Aus- tralia, e-mail: [email protected] Victor Silva Aguirre arXiv:1804.02214v2 [astro-ph.SR] 9 Apr 2018 Stellar Astrophysics Centre, Aarhus University, Ny Munkegade 120, 8000 Aarhus C, DK, e-mail: [email protected] William J. -

Isabelle Boisse WORK EXPERIENCE EDUCATION MAIN
Isabelle Boisse [email protected]; [email protected] date and place of birth: 28/06/1982, Talence (France) 65 rue des dames 75017 Paris, France +33 (0)6 28 32 33 78 38 rua da Fàbrica, Centro de Astrofìsica da Universidade do Porto apartamento 51/52, Porto, Portugal Rua das Estrelas, 4150-762 Porto, Portugal +351 925104420 +351 226 089 822 WORK EXPERIENCE Oct. 2010 - ... : Post-doctorat with N.C. Santos at the Centro de Astrofìsica da Universidade do Porto (CAUP), Porto, Portugal Sept. 2007- Sept. 2010 : PhD thesis : Doppler spectroscopy diagnostics for research and characterization of exoplanets with Pr. Bouchy F. and Pr. Hébrard G., at the Institut d’Astrophysique de Paris (IAP), Paris, France Teaching assistant (pratical work and tutorial) in physics to L1 and L2 students at University Pierre & Marie Curie, Paris, France, 64 hours/year (3 years) April - June 2007 : Research training period : Characterization of stellar activity and metallicity in the search for exoplanets with high-precision radial velocimetry with Pr. Bouchy F. and Pr. Hébrard G., IAP, Paris, France April - July 2006 : Research training period : Image processing of adaptive optics applied to the research of the Neptune’s arcs with Pr. Dumas C., ESO Santiago, Chile, and Pr. Sicardy B., LESIA, Observatoire de Meudon, France Oct. 2005 - Feb. 2006 : Teaching training period in a high school: Lycée Voltaire, Paris (weekly prepa- ration and instruction of physics classes to high school students) with M.Verdon May - June 2005 : Research training period : Looking for sources for UHECRs (Ultra high energy cos- mic rays) with Pr. -

Download This Issue (Pdf)
Volume 43 Number 1 JAAVSO 2015 The Journal of the American Association of Variable Star Observers The Curious Case of ASAS J174600-2321.3: an Eclipsing Symbiotic Nova in Outburst? Light curve of ASAS J174600-2321.3, based on EROS-2, ASAS-3, and APASS data. Also in this issue... • The Early-Spectral Type W UMa Contact Binary V444 And • The δ Scuti Pulsation Periods in KIC 5197256 • UXOR Hunting among Algol Variables • Early-Time Flux Measurements of SN 2014J Obtained with Small Robotic Telescopes: Extending the AAVSO Light Curve Complete table of contents inside... The American Association of Variable Star Observers 49 Bay State Road, Cambridge, MA 02138, USA The Journal of the American Association of Variable Star Observers Editor John R. Percy Edward F. Guinan Paula Szkody University of Toronto Villanova University University of Washington Toronto, Ontario, Canada Villanova, Pennsylvania Seattle, Washington Associate Editor John B. Hearnshaw Matthew R. Templeton Elizabeth O. Waagen University of Canterbury AAVSO Christchurch, New Zealand Production Editor Nikolaus Vogt Michael Saladyga Laszlo L. Kiss Universidad de Valparaiso Konkoly Observatory Valparaiso, Chile Budapest, Hungary Editorial Board Douglas L. Welch Geoffrey C. Clayton Katrien Kolenberg McMaster University Louisiana State University Universities of Antwerp Hamilton, Ontario, Canada Baton Rouge, Louisiana and of Leuven, Belgium and Harvard-Smithsonian Center David B. Williams Zhibin Dai for Astrophysics Whitestown, Indiana Yunnan Observatories Cambridge, Massachusetts Kunming City, Yunnan, China Thomas R. Williams Ulisse Munari Houston, Texas Kosmas Gazeas INAF/Astronomical Observatory University of Athens of Padua Lee Anne M. Willson Athens, Greece Asiago, Italy Iowa State University Ames, Iowa The Council of the American Association of Variable Star Observers 2014–2015 Director Arne A. -

Pos(BASH2015)007
Precision Stellar Astrophysics in the Kepler Era PoS(BASH2015)007 Daniel Huber∗ Sydney Institute for Astronomy, School of Physics, University of Sydney, NSW 2006, Australia E-mail: [email protected] The study of fundamental properties (such as temperatures, radii, masses, and ages) and interior processes (such as convection and angular momentum transport) of stars has implications on var- ious topics in astrophysics, ranging from the evolution of galaxies to understanding exoplanets. In this contribution I will review the basic principles of two key observational methods for con- straining fundamental and interior properties of single field stars: the study stellar oscillations (asteroseismology) and optical long-baseline interferometry. I will highlight recent breakthrough discoveries in asteroseismology such as the measurement of core rotation rates in red giants and the characterization of exoplanet systems. I will furthermore comment on the reliability of inter- ferometry as a tool to calibrate indirect methods to estimate fundamental properties, and present a new angular diameter measurement for the exoplanet host star HD 219134 which demonstrates that diameters for stars which are relatively well resolved (& 1 mas for the K band) are consistent across different instruments. Finally I will discuss the synergy between asteroseismology and interferometry to test asteroseismic scaling relations, and give a brief outlook on the expected impact of space-based missions such as K2, TESS and Gaia. Frank N. Bash Symposium 2015 18-20 October The University of Texas at Austin, USA ∗Speaker. c Copyright owned by the author(s) under the terms of the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License (CC BY-NC-ND 4.0). -

Milestone Goto-Bino Series .Cdr
Kson MilestoneK Standard Alt/Az GOTO Mount INSTRUCTIONS CONTENT FOR KSON STANDARD ALT/AZ GOTO USER INTRODUCTION.................................................................................1 ACCESSORIES..................................................................................2 ASSEMBLY INSTRUCTIONS.............................................................3 FEATURES.........................................................................5 OPERATION MANUAL FOR SKYTOUCH CONTROLLER............... 6 KEY DESCRIPTION.................................................................................6 STATUS DESCRIPTION...........................................................................6 OPERATION PROCESS...........................................................................7 POWER ON......................................................................................7 WARNING........................................................................................7 ALIGNMENT STATUS........................................................................7 CHANGE THE DATE..................................................................7 CHANGE THE TIME...................................................................8 CHANGE THE SITE...................................................................8 ALIGNMENT.............................................................................9 NAVIGATION STATUS.....................................................................11 MENU STATUS................................................................................11 -
Extrasolar Planets and Their Host Stars
Kaspar von Braun & Tabetha S. Boyajian Extrasolar Planets and Their Host Stars July 25, 2017 arXiv:1707.07405v1 [astro-ph.EP] 24 Jul 2017 Springer Preface In astronomy or indeed any collaborative environment, it pays to figure out with whom one can work well. From existing projects or simply conversations, research ideas appear, are developed, take shape, sometimes take a detour into some un- expected directions, often need to be refocused, are sometimes divided up and/or distributed among collaborators, and are (hopefully) published. After a number of these cycles repeat, something bigger may be born, all of which one then tries to simultaneously fit into one’s head for what feels like a challenging amount of time. That was certainly the case a long time ago when writing a PhD dissertation. Since then, there have been postdoctoral fellowships and appointments, permanent and adjunct positions, and former, current, and future collaborators. And yet, con- versations spawn research ideas, which take many different turns and may divide up into a multitude of approaches or related or perhaps unrelated subjects. Again, one had better figure out with whom one likes to work. And again, in the process of writing this Brief, one needs create something bigger by focusing the relevant pieces of work into one (hopefully) coherent manuscript. It is an honor, a privi- lege, an amazing experience, and simply a lot of fun to be and have been working with all the people who have had an influence on our work and thereby on this book. To quote the late and great Jim Croce: ”If you dig it, do it. -

Turn Left at Orion
This page intentionally left blank Turn Left at Orion A hundred night sky objects to see in a small telescope — and how to find them Third edition Guy Consolmagno Vatican Observatory, Tucson Arizona and Vatican City State Dan M. Davis State University ofNew York at Stony Brook illustrations by Karen Kotash Sepp, Anne Drogin, and Mary Lynn Skirvin CAMBRIDGE UNIVERSITY PRESS Cambridge, New York, Melbourne, Madrid, Cape Town, Singapore, São Paulo Cambridge University Press The Edinburgh Building, Cambridge CB2 8RU, UK Published in the United States of America by Cambridge University Press, New York www.cambridge.org Information on this title: www.cambridge.org/9780521781909 © Cambridge University Press 1989, 1995, 2000 This publication is in copyright. Subject to statutory exception and to the provision of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published in print format 2000 ISBN-13 978-0-511-33717-8 eBook (EBL) ISBN-10 0-511-33717-5 eBook (EBL) ISBN-13 978-0-521-78190-9 hardback ISBN-10 0-521-78190-6 hardback Cambridge University Press has no responsibility for the persistence or accuracy of urls for external or third-party internet websites referred to in this publication, and does not guarantee that any content on such websites is, or will remain, accurate or appropriate. How Do You Get to Albireo? .............................4 How to Use This Book ....................................... 6 Contents The Moon ......................................................... 12 Lunar Eclipses Worldwide, 2004–2020 ........................... 23 The Planets ......................................................26 Approximate Positions of the Planets, 2004–2019.......... 28 When to See Mercury in the Evening Sky, 2004–2019 ...