Using JPF1 Format
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
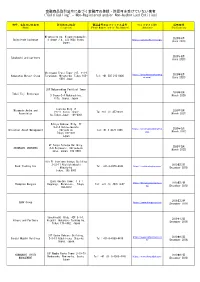
金融商品取引法令に基づく金融庁の登録・許認可を受けていない業者 ("Cold Calling" - Non-Registered And/Or Non-Authorized Entities)
金融商品取引法令に基づく金融庁の登録・許認可を受けていない業者 ("Cold Calling" - Non-Registered and/or Non-Authorized Entities) 商号、名称又は氏名等 所在地又は住所 電話番号又はファックス番号 ウェブサイトURL 掲載時期 (Name) (Location) (Phone Number and/or Fax Number) (Website) (Publication) Miyakojima-ku, Higashinodamachi, 2020年6月 SwissTrade Exchange 4-chōme−7−4, 534-0024 Osaka, https://swisstrade.exchange/ (June 2020) Japan 2020年6月 Takahashi and partners (June 2020) Shiroyama Trust Tower 21F, 4-3-1 https://www.hamamatsumerg 2020年6月 Hamamatsu Merger Group Toranomon, Minato-ku, Tokyo 105- Tel: +81 505 213 0406 er.com/ (June 2020) 0001 Japan 28F Nakanoshima Festival Tower W. 2020年3月 Tokai Fuji Brokerage 3 Chome-2-4 Nakanoshima. (March 2020) Kita. Osaka. Japan Toshida Bldg 7F Miyamoto Asuka and 2020年3月 1-6-11 Ginza, Chuo- Tel:+81 (3) 45720321 Associates (March 2021) ku,Tokyo,Japan. 104-0061 Hibiya Kokusai Bldg, 7F 2-2-3 Uchisaiwaicho https://universalassetmgmt.c 2020年3月 Universal Asset Management Chiyoda-ku Tel:+81 3 4578 1998 om/ (March 2022) Tokyo 100-0011 Japan 9F Tokyu Yotsuya Building, 2020年3月 SHINBASHI VENTURES 6-6 Kojimachi, Chiyoda-ku (March 2023) Tokyo, Japan, 102-0083 9th Fl Onarimon Odakyu Building 3-23-11 Nishishinbashi 2019年12月 Rock Trading Inc Tel: +81-3-4579-0344 https://rocktradinginc.com/ Minato-ku (December 2019) Tokyo, 105-0003 Izumi Garden Tower, 1-6-1 https://thompsonmergers.co 2019年12月 Thompson Mergers Roppongi, Minato-ku, Tokyo, Tel: +81 (3) 4578 0657 m/ (December 2019) 106-6012 2019年12月 SBAV Group https://www.sbavgroup.com (December 2019) Sunshine60 Bldg. 42F 3-1-1, 2019年12月 Hikaro and Partners Higashi-ikebukuro Toshima-ku, (December 2019) Tokyo 170-6042, Japan 31F Osaka Kokusai Building, https://www.smhpartners.co 2019年12月 Sendai Mubuki Holdings 2-3-13 Azuchi-cho, Chuo-ku, Tel: +81-6-4560-4410 m/ (December 2019) Osaka, Japan. -

Narita Airport Route(*PDF File)
1 of 2 Bus stop valid for Airport Limousine Bus Premium Coupon(Narita Airport route) required required Area Bus Stop Useable Area Bus Stop Useable number number Tokyo Station/Marunouchi North ○ 2 coupons The New Sanno Hotel ○ 2 coupons Mandarin Oriental Tokyo ○ 2 coupons The Prince Park Tower Tokyo ○ 2 coupons HOSHINOYA Tokyo/Otemachi Financial City Grand Cube ○ 2 coupons Tokyo Prince Hotel ○ 2 coupons AMAN TOKYO ○ 2 coupons Andaz Tokyo ○ 2 coupons Tokyo Station/Yaesu North(Tekko Building) ○ 2 coupons Conrad Tokyo ○ 2 coupons Tokyo Station/Yaesu South ○ 2 coupons Park Hotel Tokyo ○ 2 coupons Tokyo Station, Nihonbashi T-CAT(Tokyo City Air Terminal), Tokyo City Air Terminal(T-CAT) ○ 2 coupons The Royal Park Iconic Tokyo Shiodome ○ 2 coupons Century Southern Tower ○ 2 coupons Tennozu Isle(Dai-ichi Hotel Tokyo Seafort) ○ 2 coupons Hotel Sunroute Plaza Shinjuku ○ 2 coupons HOTEL THE CELESTINE TOKYO SHIBA ○ 2 coupons Hilton Tokyo ○ 2 coupons Shiba Park Hotel ○ 2 coupons Shinjuku Washington Hotel ○ 2 coupons Hotel InterContinental Tokyo Bay ○ 2 coupons Park Hyatt Tokyo ○ 2 coupons Hilton Tokyo Odaiba ○ 2 coupons Hyatt Regency Tokyo 2 coupons Grand Nikko Tokyo Daiba 2 coupons Shinjuku ○ ○ Keio Plaza Hotel ○ 2 coupons SOTETSU GRAND FRESA TOKYO-BAY ARIAKE ○ 2 coupons Shiba, Shiodome, Takeshiba, Rinkai Fukutoshin (Tokyo Water Front) Shinjuku Station/West ○ 2 coupons Tokyo Bay Ariake Washington Hotel ○ 2 coupons Shinjuku Expressway Bus Terminal ○ 2 coupons Terminal 3 ○ 2 coupons 【Early Morning Service】Shinjuku Expressway Bus Terminal ○ 2 coupons -
Introducing Tokyo Page 10 Panorama Views
Introducing Tokyo page 10 Panorama views: Tokyo from above 10 A Wonderful Catastrophe Ulf Meyer 34 The Informational World City Botond Bognar 42 Bunkyo-ku page 50 001 Saint Mary's Cathedral Kenzo Tange 002 Memorial Park for the Tokyo War Dead Takefumi Aida 003 Century Tower Norman Foster 004 Tokyo Dome Nikken Sekkei/Takenaka Corporation 005 Headquarters Building of the University of Tokyo Kenzo Tange 006 Technica House Takenaka Corporation 007 Tokyo Dome Hotel Kenzo Tange Chiyoda-ku page 56 008 DN Tower 21 Kevin Roche/John Dinkebo 009 Grand Prince Hotel Akasaka Kenzo Tange 010 Metro Tour/Edoken Office Building Atsushi Kitagawara 011 Athénée Français Takamasa Yoshizaka 012 National Theatre Hiroyuki Iwamoto 013 Imperial Theatre Yoshiro Taniguchi/Mitsubishi Architectural Office 014 National Showa Memorial Museum/Showa-kan Kiyonori Kikutake 015 Tokyo Marine and Fire Insurance Company Building Kunio Maekawa 016 Wacoal Building Kisho Kurokawa 017 Pacific Century Place Nikken Sekkei 018 National Museum for Modern Art Yoshiro Taniguchi 019 National Diet Library and Annex Kunio Maekawa 020 Mizuho Corporate Bank Building Togo Murano 021 AKS Building Takenaka Corporation 022 Nippon Budokan Mamoru Yamada 023 Nikken Sekkei Tokyo Building Nikken Sekkei 024 Koizumi Building Peter Eisenman/Kojiro Kitayama 025 Supreme Court Shinichi Okada 026 Iidabashi Subway Station Makoto Sei Watanabe 027 Mizuho Bank Head Office Building Yoshinobu Ashihara 028 Tokyo Sankei Building Takenaka Corporation 029 Palace Side Building Nikken Sekkei 030 Nissei Theatre and Administration Building for the Nihon Seimei-Insurance Co. Murano & Mori 031 55 Building, Hosei University Hiroshi Oe 032 Kasumigaseki Building Yamashita Sekkei 033 Mitsui Marine and Fire Insurance Building Nikken Sekkei 034 Tajima Building Michael Graves Bibliografische Informationen digitalisiert durch http://d-nb.info/1010431374 Chuo-ku page 74 035 Louis Vuitton Ginza Namiki Store Jun Aoki 036 Gucci Ginza James Carpenter 037 Daigaku Megane Building Atsushi Kitagawara 038 Yaesu Bookshop Kajima Design 039 The Japan P.E.N. -

MEGAMIASTO TOKIO RAJMUND MYDEŁ 7 Miast Świata (UN World Urbanization Prospect), Wyróżniana Jest Ta Nowa Kategoria Wielkościo Wa Miejskich Form Osadniczych
M EGAMI ASTO ТОКІО RAJMUND MYDEŁ Być małą kroplą w oceanie wiedzy, piękne marzenie Rajmund Mydeł M EGAMI ASTO ТОКІО RAJMUND MYDEŁ Kraków 2014 SPIS TREŚCI WPROWADZENIE............................................................................................................................................................ 7 1. PRZEDMIOT I CEL STUDIUM................................................................................................................................... 17 2 . KONCEPCJE PLANISTYCZNE ROZWOJU M EGAMI ASTA ORAZ PRZESTRZENNO-FUNKCJONALNE EFEKTY ICH REALIZACJI......................................................................................................................................... 29 3 . STRUKTURA WIELKOŚCIOWA MIAST ORAZ JEJ PRZESTRZENNE ZRÓŻNICOWANIE..........................lO l 4 . DEMOGRAFICZNO-SPOŁECZNY ORAZ FUNKCJONALNY OBRAZ M EGAMI ASTA I JEGO PRZESTRZENNA ZMIENNOŚĆ............................................................................................................... 121 5 . ROZWÓJ I PRZEMIANY PRZESTRZENNYCH UKŁADÓW RYNKU PRACY...................................................141 6. FUNKCJONOWANIE MEGAMIASTA ORAZ ZRÓŻNICOWANIE ŚRODKÓW TRANSPORTU W PRZEWOZACH PASAŻERSKICH.......................................................................................................................153 PODSUMOWANIE........................................................................................................................................................ 173 BIBLIOGRAFIA...............................................................................................................................................................177 -

Ginza Opens As Building, a Trend-Setting Retail Harvest Club
CONTENTS MESSAGE FROM THE PRESIDENT 02 MESSAGE FROM THE PRESIDENT As a core company of the Tokyu Fudosan Holdings Group, 03 HISTORY OF TOKYU LAND CORPORATION We are creating a town to solve social issues through 05 ABOUT TOKYU FUDOSAN HOLDINGS GROUP value creation by cooperation. 06 GROUP’S MEDIUM- AND LONG-TERM MANAGEMENT PLAN 07 URBAN DEVELOPMENT THAT PROPOSES NEW LIFESTYLES 07 THE GREATER SHIBUYA AREA CONCEPT 09 LIFE STORY TOWN 11 URBAN DEVELOPMENT 25 RESIDENTIAL 33 WELLNESS 43 OVERSEAS BUSINESSES 47 REAL ESTATE SOLUTIONS Tokyu Land Corporation is a comprehensive real estate company the aging population and childcare through the joint development of with operations in urban development, residential property, wellness, condominiums and senior housing. In September 2017, we celebrated overseas businesses and more. We are a core company of Tokyu the opening of the town developed in the Setagaya Nakamachi Fudosan Holdings Group. Since our founding in 1953, we have Project, our first project for creating a town which fosters interactions 48 MAJOR AFFILIATES consistently worked to create value by launching new real estate between generations. 49 HOLDINGS STRUCTURE businesses. We have expanded our business domains in response to For the expansion of the scope of cyclical reinvestment business, changing times and societal changes, growing from development to we are expanding the applicable areas of the cyclical reinvestment 50 TOKYU GROUP PHILOSOPHY property management, real estate agency and, in particular, a retail business to infrastructure, hotels, resorts and residences for business encouraging work done by hand. These operations now run students, in our efforts to ensure the expansion of associated assets independently as Tokyu Community Corporation, Tokyu Livable, Inc. -

Proposal for the Global Financial City Tokyo Material 3 Presenter: Mr
Proposal for the Global Financial City Tokyo Material 3 Presenter: Mr. Haruo Shimada Date: May 19th, 2017 I. Introduction II. Can Tokyo Regain Its Position as Asia’s Financial Center? I. Tokyo used to be a financial center of Asia II. Now, Hong Kong, Singapore, Shanghai III. Structural changes in the financial market and financial businesses IV. Can Tokyo win back its position? III. Strategic Variables in Realizing Financial City I. The main strategic variables are tax rates and taxation system II. Focus on profitability after tax III. Living and business environment is crucial for highly-skilled professional IV. Proposal for Visions of Financial City Tokyo I. Realize favorable tax treatment for special zone in financial city II. Develop market infrastructures for asset management III. FinTech is frontier full of potential IV. Creating a symbolical center for Fintech V. Further improve comfortable living environment 4 V. Comfortable Living Environment is the Key Fundamental I. High reputation on Tokyo’s living environment II. Living and business environment III. Healthcare environment IV. Child rearing and education environment V. Entertainment environment 5 Developing the Living Environment for a Global Financial City Haruo Shimada, Chair Area Promotion Council of the Special Zone for Asian Headquarters May 19, 2017 6 Area Promotion Council of the Special Zone for Asian Headquarters 〇 The Asian Headquarter Special Zone is designated based on the Comprehensive Special Zone Law (2011). As for 2012-2016, we aimed and succeeded in attracting 50 global companies to establish their Asian regional headquarters and R&D centers in Tokyo. 〇 The Area Promotion Council of the Special Zone for Asian Headquarters, a body established to promote the special zone’s plan as stipulated by law, is comprised of developers, JETRO, financial institutions, wards in Tokyo and experts. -

Breaking the Rules of Kimono a New Book Shatters Antiquated Views of This Traditional Garment
JULY 2017 Japan’s number one English language magazine BREAKING THE RULES OF KIMONO A NEW BOOK SHATTERS ANTIQUATED VIEWS OF THIS TRADITIONAL GARMENT PLUS: The Boys for Sale in Shinjuku, Best Sake of 2017, Japan's New Emperor, and What Really Goes on Inside "Terrace House" To all investors and customers of e Parkhouse series: e Mitsubishi Jisho Residence overseas sales team is on hand for all your needs For the most up-to-date information about Mitsubishi Jisho Residence's new real estate projects, please visit our English website at www.mecsumai.com/international/en For inquiries, please email [email protected] Live in a Home for Life. e Parkhouse 34 26 32 36 JULY 2017 radar in-depth 36 BOYS FOR SALE THIS MONTH’S HEAD TURNERS COFFEE-BREAK READS A new documentary brings to light a particu- lar kind of sex trade in Shinjuku Ni-chome. 8 AREA GUIDE: YURAKUCHO 26 BREAKING THE RULES OF KIMONO This old-school neighborhood has a few A new book shows off the different person- modern surprises up its sleeve. alities of this very traditional garment. guide 14 STYLE 30 THE LIFE AND LOVE OF JAPAN'S CULTURE ROUNDUP Ready for a summer romance? Get your NEW EMPEROR 40 ART & FICTION spark back with some flirtatious swimwear As Emperor Akihito prepares to step down, Julian Lennon shows off his photography, all eyes are turning towards his son. and a new spy novel wends its way into 18 BEAUTY North Korea. Shake up your make-up with a full kit of 32 THE MISUNDERSTOOD CROWS organic, natural cosmetics. -
Iidabashi Station West Exit Area Redevelopment Project Case Study
CodeCode ofof ConductConduct TheThe RealReal EstateEstate CompaniesCompanies AssociationAssociation ofof JapanJapan -Creating New Value for the Economy and Society- Japan’s declining population, falling birthrate and aging society are all having major impacts on our economy and society. New issues such as increasing internationalization and global environmental problems also need to be addressed. In this context, Japan’s real estate industry has a social responsibility to create new value to contribute to the economy and society. It is expected to supply high-quality buildings and housing, and help make people’s daily lives-whether at home, work, or play-more comfortable and affluent. As a cornerstone of domestic demand, the industry should also help drive national economic growth. Based on this mission, members of the Real Estate Companies Association of Japan pursue their activities in accordance with the principles below. 1. Creating Attractive Cities Members will help create safe, stable, comfortable and appealing cities; renew urban areas through forming quality housing stock and advanced business infrastructure; create dynamic environments rich in amenities; and work to maintain and enhance their value from both a hard and soft perspective so that they may be passed down to the future generations as high-quality assets. 2. Customer-Focused Activities and Management The provision of “Customer First” management is best served by supporting the lifestyle pursuits of customers in meeting their ever diversifying and increasingly unique needs with an enhanced selection of products and services, and also in providing accurate information while maintaining high ethical standards and acquiring greater expertise. 3. Environmental Harmony Members will work sustainably in order to integrate economic and environmental goals and create harmony through the realization of low-carbon cities. -

Rail-Integrated Urban Development Japanese Experience and Its Implications
Rail-integrated Urban Development Japanese Experience and Its Implications October 10, 2016 中分毅/Takeshi NAKAWAKE Executive Vice President NIKKEN SEKKEI Ltd. Metoropoliya NIKKEN SEKKEI A Professional Services Firm covering Architectural Design, Urban Planning/Design, & Environmental Engineering 2 NIKKEN SEKKEI 3 Self-introduction Profession: Environmental Engineering & City Planning Projects: • Strategic Plan for Whole City • Brownfield Redevelopment • City Center Redevelopment • New Town Development • Japan, China, Malaysia, Russia, KSA Vietnam, India Current concerns: • TOD(Transit Oriented Development) • Brownfield Regeneration • LVC(Land Value Capture) • Economic Value of Green Development 4 Traffic congestion is a major Headache that spoils Economic Efficiency & Citizen Mobility 5 The transportation Sector is one of the major sources of GHG & Air pollution Worldwide 2014 SOURCE:IPCC(2014) SOURCE:TOKYO METROPOLITAN GORVERNMENT 6 Urban Density & Transportation-related Energy Consumption 7 TOD is now one of promising approaches for GREERN DEVELOPMENT What is TOD? Transit Oriented Development SOURCE:NS INTERNAL Transit Oriented Development (TOD) refers to residential and Commercial Centers designed to maximize access by Transit and Nonmotorized transportation, and with other features to Encourage Transit Ridership. A typical TOD has a rail or bus station at its center, surrounded by relatively high-density development, with progressively lower-density spreading outwards 300 to 800 meters, which represents pedestrian scale distances. 8 -

Shinjuku Park Tower : Access Map Park Hyatt Tokyo/Living Design Center Ozone/The Conran Shop Shinjuku/Park Tower Hall
SHINJUKU PARK TOWER : ACCESS MAP PARK HYATT TOKYO/LIVING DESIGN CENTER OZONE/THE CONRAN SHOP SHINJUKU/PARK TOWER HALL By train ● Tokyo Metro Marunouchi Line ● Toei Oedo Line ● JR Shinjuku Station 12 minutes walk Nishi-Shinjuku Station Shinjuku Nishiguchi Station ● Toei Shinjuku Line, Keio New Line Shinjuku Station 10 minutes walk Shinjuku I-LAND ● Keio New Line Hatsudai Station 8 minutes walk Shinjuku Nomura Bldg. Odakyu halc ● Toei Oedo Line Tochomae Station 8 minutes walk Hilton-Tokyo L-Tower Studio ALTA ● Odakyu Line Sangubashi Station 10 minutes walk Shinjuku Mitsui Bldg. Shuttle bus stop ● Kinokuniya Book Tokyo Metro Shinjuku Center Bldg. Isetan Sumitomo Bldg. Marunouchi Line Shinjuku Station Shinjuku Mitsukoshi ALCOTT Hyatt Regency Tokyo Shinjuku Station ●Tokyo Metro Marunouchi Line By bus ●Tokyo Metro Hukutoshin Line Kumano Jinjya Shinjuku Post Office ●JR line Shinjuku 3 Chome Station Keio Plaza Hotel ●Odakyu line By Keio Bus from JR Shinjuku Station (West Exit, No.21) "S01 Shinjuku Metropolitan ● Toei Oedo Line Keio Bus ●Keio line Otsuka furniture shop Loop" to Park Hyatt Tokyo A4 Tochomae Station Tokyo Metropolitan ■Shuttle Bus Service Juniso St. Shinjuku Central Park Main Building No.1 Shinjuku high school South Exit A shuttle bus service is available between SHINJUKU PARK TOWER and the Bank of Nishi-Shinjuku 1-Chome Tokyo-Mitsubishi UFJ on the first floor of the L Tower (Shinjuku Station West Exit) Shinjuku NS Bldg. (Shuttle buses leave every 10-15 minutes from 10:10a.m.) Shinjuku Central Park South KDDI Bldg. Koshu-Kaido Ave. ● Tokyo Metropolitan Toei Oedo Line Takashimaya Times Square Monday/Tuesday/Thursday 10:10~19:20 at interval of ten to fifteen minute Main Building No.2 ● Shinjuku Station Toei Shinjuku Line・ Friday/Saturday/Sunday 10:10~19:50 at interval of ten to fifteen minute Keio New Line Washington Hotel Shinjuku Station Wednesday 10:10~16:50 at interval of fifteen minute Nishi-Shinjuku Shuto Expressway Shinjukugyoen Tsunohazu kumin Shinjuku Ramp Center Mae Bunka Univ. -
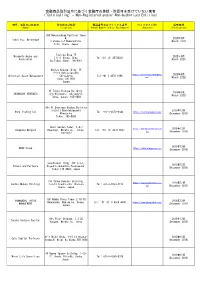
金融商品取引法令に基づく金融庁の登録・許認可を受けていない業者 ("Cold Calling" - Non-Registered And/Or Non-Authorized Entities)
金融商品取引法令に基づく金融庁の登録・許認可を受けていない業者 ("Cold Calling" - Non-Registered and/or Non-Authorized Entities) 商号、名称又は氏名等 所在地又は住所 電話番号又はファックス番号 ウェブサイトURL 掲載時期 (Name) (Location) (Phone Number and/or Fax Number) (Website) (Publication) 28F Nakanoshima Festival Tower W. 2020年3月 Tokai Fuji Brokerage 3 Chome-2-4 Nakanoshima. (March 2020) Kita. Osaka. Japan Toshida Bldg 7F Miyamoto Asuka and 2020年3月 1-6-11 Ginza, Chuo- Tel:+81 (3) 45720321 Associates (March 2021) ku,Tokyo,Japan. 104-0061 Hibiya Kokusai Bldg, 7F 2-2-3 Uchisaiwaicho https://universalassetmgmt.c 2020年3月 Universal Asset Management Chiyoda-ku Tel:+81 3 4578 1998 om/ (March 2022) Tokyo 100-0011 Japan 9F Tokyu Yotsuya Building, 2020年3月 SHINBASHI VENTURES 6-6 Kojimachi, Chiyoda-ku (March 2023) Tokyo, Japan, 102-0083 9th Fl Onarimon Odakyu Building 3-23-11 Nishishinbashi 2019年12月 Rock Trading Inc Tel: +81-3-4579-0344 https://rocktradinginc.com/ Minato-ku (December 2019) Tokyo, 105-0003 Izumi Garden Tower, 1-6-1 https://thompsonmergers.co 2019年12月 Thompson Mergers Roppongi, Minato-ku, Tokyo, Tel: +81 (3) 4578 0657 m/ (December 2019) 106-6012 2019年12月 SBAV Group https://www.sbavgroup.com (December 2019) Sunshine60 Bldg. 42F 3-1-1, 2019年12月 Hikaro and Partners Higashi-ikebukuro Toshima-ku, (December 2019) Tokyo 170-6042, Japan 31F Osaka Kokusai Building, https://www.smhpartners.co 2019年12月 Sendai Mubuki Holdings 2-3-13 Azuchi-cho, Chuo-ku, Tel: +81-6-4560-4410 m/ (December 2019) Osaka, Japan. 16F Namba Parks Tower 2-10-70 YAMANASHI KYOTO 2019年12月 Nanbanaka, Naniwa-ku, Osaka, Tel: +81 (0) 6-4560-4440 https://www.ykmglobal.com/ MANAGEMENT (December 2019) Japan 8th Floor Shidome, 1.2.20 2019年12月 Tenshi Venture Capital Kaigan, Minatu-ku, Tokyo (December 2019) 6flr Nishi Bldg. -

Corporate History 1800S in 2009, Kajima Corporation Celebrated Its 170Th Anniversary
CORPORATE HISTORY 1800s IN 2009, KAJIMA CORPORATION CELEBRATED ITS 170TH ANNIVERSARY. From the historic Edo period to today, Kajima has played a vital role in developing the social capital essential to 1860 Ei-Ichiban Kan Japan’s industrial and eco- 1880 Began construction of Yanagase nomic advancement, and an Railroad improved standard of living for Iwazo Kajima its citizens. Naturally, times [JAPAN] have not always been generous, and countless chal- 1860 Ei-Ichiban Kan lenges have arisen over the years. To face them, our 1872 Houraisha Office predecessors pooled their knowledge and strengths 1874 Papermaking Company (Oji to anticipate the needs of the era, turning the tables Paper) Factory on adversity to embark on a bold wave of manage- 1878 Okayama Prefectural Office 1880 Began construction of ment innovation. Yanagase Railroad 1872 Houraisha Office The key to Kajima’s ongoing development is a bold 1891 Began construction of Usui and vigorous enterprising spirit that runs through the Railway Line veins of our managers and employees. Our corporate philosophy is “As a group of individuals working together as one, we pursue creative progress and development founded on both rational, scientific 1874 Papermaking Company (Oji Paper) principles and a humanitarian outlook, through which Factory we strive to continually advance our business operations and con- tribute to society.” While times may change, our unyield- 1878 Okayama Prefectural Office ing commitment to this philosophy never will. [OVERSEAS] 1899 Built railroads in Taiwan, Korea, etc. 1899 Built railroads in Taiwan, Korea, etc. 82 KAJIMA CORPORATION ANNUAL REPORT 2011 1900-1959 1960-1969 1918 Began construction of 1963 New Tanna Tunnel Tanna Tunnel (17-year project) 1924 Ohmine Dam 1968 Kasumigaseki Building 1918 Began construction of 1960 Yamashina construction Tanna Tunnel (17-year zone on the Meishin project) Expressway 1924 Ohmine Dam 1961 Okutadami Dam 1934 Ueno Station 1962 Tobata Iron Mill, Yawata Iron 1957 No.1 Reactor, Japan Nuclear and Steel Co., Ltd.