Computer Development (SEAC and DTSEAC) at the National Bureau Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Early Stored Program Computers
Stored Program Computers Thomas J. Bergin Computing History Museum American University 7/9/2012 1 Early Thoughts about Stored Programming • January 1944 Moore School team thinks of better ways to do things; leverages delay line memories from War research • September 1944 John von Neumann visits project – Goldstine’s meeting at Aberdeen Train Station • October 1944 Army extends the ENIAC contract research on EDVAC stored-program concept • Spring 1945 ENIAC working well • June 1945 First Draft of a Report on the EDVAC 7/9/2012 2 First Draft Report (June 1945) • John von Neumann prepares (?) a report on the EDVAC which identifies how the machine could be programmed (unfinished very rough draft) – academic: publish for the good of science – engineers: patents, patents, patents • von Neumann never repudiates the myth that he wrote it; most members of the ENIAC team contribute ideas; Goldstine note about “bashing” summer7/9/2012 letters together 3 • 1.0 Definitions – The considerations which follow deal with the structure of a very high speed automatic digital computing system, and in particular with its logical control…. – The instructions which govern this operation must be given to the device in absolutely exhaustive detail. They include all numerical information which is required to solve the problem…. – Once these instructions are given to the device, it must be be able to carry them out completely and without any need for further intelligent human intervention…. • 2.0 Main Subdivision of the System – First: since the device is a computor, it will have to perform the elementary operations of arithmetics…. – Second: the logical control of the device is the proper sequencing of its operations (by…a control organ. -
Computer Development at the National Bureau of Standards
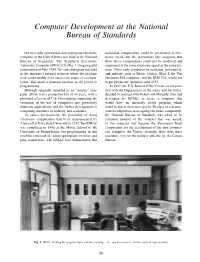
Computer Development at the National Bureau of Standards The first fully operational stored-program electronic individual computations could be performed at elec- computer in the United States was built at the National tronic speed, but the instructions (the program) that Bureau of Standards. The Standards Electronic drove these computations could not be modified and Automatic Computer (SEAC) [1] (Fig. 1.) began useful sequenced at the same electronic speed as the computa- computation in May 1950. The stored program was held tions. Other early computers in academia, government, in the machine’s internal memory where the machine and industry, such as Edvac, Ordvac, Illiac I, the Von itself could modify it for successive stages of a compu- Neumann IAS computer, and the IBM 701, would not tation. This made a dramatic increase in the power of begin productive operation until 1952. programming. In 1947, the U.S. Bureau of the Census, in coopera- Although originally intended as an “interim” com- tion with the Departments of the Army and Air Force, puter, SEAC had a productive life of 14 years, with a decided to contract with Eckert and Mauchly, who had profound effect on all U.S. Government computing, the developed the ENIAC, to create a computer that extension of the use of computers into previously would have an internally stored program which unknown applications, and the further development of could be run at electronic speeds. Because of a demon- computing machines in industry and academia. strated competence in designing electronic components, In earlier developments, the possibility of doing the National Bureau of Standards was asked to be electronic computation had been demonstrated by technical monitor of the contract that was issued, Atanasoff at Iowa State University in 1937. -
P the Pioneers and Their Computers
The Videotape Sources: The Pioneers and their Computers • Lectures at The Compp,uter Museum, Marlboro, MA, September 1979-1983 • Goal: Capture data at the source • The first 4: Atanasoff (ABC), Zuse, Hopper (IBM/Harvard), Grosch (IBM), Stibitz (BTL) • Flowers (Colossus) • ENIAC: Eckert, Mauchley, Burks • Wilkes (EDSAC … LEO), Edwards (Manchester), Wilkinson (NPL ACE), Huskey (SWAC), Rajchman (IAS), Forrester (MIT) What did it feel like then? • What were th e comput ers? • Why did their inventors build them? • What materials (technology) did they build from? • What were their speed and memory size specs? • How did they work? • How were they used or programmed? • What were they used for? • What did each contribute to future computing? • What were the by-products? and alumni/ae? The “classic” five boxes of a stored ppgrogram dig ital comp uter Memory M Central Input Output Control I O CC Central Arithmetic CA How was programming done before programming languages and O/Ss? • ENIAC was programmed by routing control pulse cables f ormi ng th e “ program count er” • Clippinger and von Neumann made “function codes” for the tables of ENIAC • Kilburn at Manchester ran the first 17 word program • Wilkes, Wheeler, and Gill wrote the first book on programmiidbBbbIiSiing, reprinted by Babbage Institute Series • Parallel versus Serial • Pre-programming languages and operating systems • Big idea: compatibility for program investment – EDSAC was transferred to Leo – The IAS Computers built at Universities Time Line of First Computers Year 1935 1940 1945 1950 1955 ••••• BTL ---------o o o o Zuse ----------------o Atanasoff ------------------o IBM ASCC,SSEC ------------o-----------o >CPC ENIAC ?--------------o EDVAC s------------------o UNIVAC I IAS --?s------------o Colossus -------?---?----o Manchester ?--------o ?>Ferranti EDSAC ?-----------o ?>Leo ACE ?--------------o ?>DEUCE Whirl wi nd SEAC & SWAC ENIAC Project Time Line & Descendants IBM 701, Philco S2000, ERA.. -

A Large Routine
A large routine Freek Wiedijk It is not widely known, but already in June 1949∗ Alan Turing had the main concepts that still are the basis for the best approach to program verification known today (and for which Tony Hoare developed a logic in 1969). In his three page paper Checking a large routine, Turing describes how to verify the correctness of a program that calculates the factorial function by repeated additions. He both shows how to use invariants to establish the correctness of this program, as well as how to use a variant to establish termination. In the paper the program is only presented as a flow chart. A modern C rendering is: int fac (int n) { int s, r, u, v; for (u = r = 1; v = u, r < n; r++) for (s = 1; u += v, s++ < r; ) ; return u; } Turing's paper seems not to have been properly appreciated at the time. At the EDSAC conference where Turing presented the paper, Douglas Hartree criticized that the correctness proof sketched by Turing should not be called inductive. From a modern point of view this is clearly absurd. Marc Schoolderman first told me about this paper (and in his master's thesis used the modern Why3 tool of Jean-Christophe Filli^atreto make Turing's paper fully precise; he also wrote the above C version of Turing's program). He then challenged me to speculate what specific computer Turing had in mind in the paper, and what the actual program for that computer might have been. My answer is that the `EPICAC'y of this paper probably was the Manchester Mark 1. -
Pioneercomputertimeline2.Pdf
Memory Size versus Computation Speed for various calculators and computers , IBM,ZQ90 . 11J A~len · W •• EDVAC lAS• ,---.. SEAC • Whirlwind ~ , • ENIAC SWAC /# / Harvard.' ~\ EDSAC Pilot• •• • ; Mc;rk I " • ACE I • •, ABC Manchester MKI • • ! • Z3 (fl. pt.) 1.000 , , .ENIAC •, Ier.n I i • • \ I •, BTL I (complexV • 100 ~ . # '-------" Comptometer • Ir.ne l ' with constants 10 0.1 1.0 10 100 lK 10K lOOK 1M GENERATIONS: II] = electronic-vacuum tube [!!!] = manual [1] = transistor Ime I = mechanical [1] = integrated circuit Iem I = electromechanical [I] = large scale integrated circuit CONTENTS THE COMPUTER MUSEUM BOARD OF DIRECTORS The Computer Museum is a non-profit. Kenneth H. Olsen. Chairman public. charitable foundation dedicated to Digital Equipment Corporation preserving and exhibiting an industry-wide. broad-based collection of the history of in Charles W Bachman formation processing. Computer history is Cullinane Database Systems A Compcmion to the Pioneer interpreted through exhibits. publications. Computer Timeline videotapes. lectures. educational programs. C. Gordon Bell and other programs. The Museum archives Digital Equipment Corporation I Introduction both artifacts and documentation and Gwen Bell makes the materials available for The Computer Museum 2 Bell Telephone Laboratories scholarly use. Harvey D. Cragon Modell Complex Calculator The Computer Museum is open to the public Texas Instruments Sunday through Friday from 1:00 to 6:00 pm. 3 Zuse Zl, Z3 There is no charge for admission. The Robert Everett 4 ABC. Atanasoff Berry Computer Museum's lecture hall and rece ption The Mitre Corporation facilities are available for rent on a mM ASCC (Harvard Mark I) prearranged basis. For information call C. -

At Grange Farm the COMPUTER – the 20Th Century’S Legacy to the Next Millennium
Computer Commemoration At Grange Farm THE COMPUTER – the 20th century’s legacy to the next millennium. This monument commemorates the early pioneers responsible for the development of machines that led to, or indeed were, the first electronic digital computers. This spot was chosen because the COLOSSUS, the first effective, operational, automatic, electronic, digital computer, was constructed by the Post Office Research Station at Dollis Hill (now BT research), whose research and development later moved from that site to Martlesham, just east of here and the landowners thought this would be a suitable setting to commemorate this achievement. The story of these machines has nothing to do with the names and companies that we associate with computers today. Indeed the originators of the computer are largely unknown, and their achievement little recorded. All the more worth recording is that this first machine accomplished a task perhaps as important as that entrusted to any computer since. The electronic digital computer is one of the greatest legacies the 20th century leaves to the 21st. The History of Computing… The shape of the monument is designed to reflect a fundamental concept in mathematics. This is explained in the frame entitled “The Monument”. You will notice that some of the Stations are blue and some are orange. Blue stations talk about concepts and ideas pertinent to the development of the computer, and orange ones talk about actual machines and the events surrounding them. The monument was designed and funded by a grant making charity. FUNDAMENTAL FEATURES OF COMPUTERS The computer is now so sophisticated that attention is not normally drawn to its fundamental characteristics. -

Volunteer Information Exchange Sharing What We Know with Those We Know Volume 5 Number 7 August 17, 2015
Volunteer Information Exchange Sharing what we know with those we know Volume 5 Number 7 August 17, 2015 Contribute To The VIE Fellows Nominations Open to the public through An exciting issue in many ways: some great articles, August 31. new news, and informative links. The Computer History Museum Fellow Awards publicly Karen Kroslowitz writes on a major milestone -- recognize individuals who have made outstanding 100,000 artifacts cataloged in our Mimsy data base. contributions to computing in areas as diverse as What a huge effort that represents. Thanks to all who artificial intelligence, networking, programming helped achieve it and thanks to Karen for writing it up languages, computer graphics, microprocessors, and for us operating systems. If you know someone that fits this One of those 100,000 was a Dyseac artifact – who description please nominate them today! among us has heard of that early computer. But Sue Click here for more details. The next class of Fellows Mickel has written up that new acquisition for us. will be inducted on Saturday, April 16, 2016. Thank you Sue. (From Carina Sweet) Chris Garcia writes up still more of those new acquisitions—from phones to computer terminals. In VIE 5.06 we re-printed a first hand account of a CHM Blog person who had attended the “announcement” Recent CHM Blog Entries (revelation?) of Colossus. The author's account had some inaccuracies that Dave Levish points out. Kirsten Tashev keeps us up-to-date on new CHM blog Thanks to Dave. entries. CHM staff and volunteers were invited to attend an • Len Sushtek on acquisition of the source code for information session on July 15, 2015, about current Electronic Arts Deluxe Paint early source code. -

Monster Computers Vs. Engineering Computing. the Early Computer Culture in the US, 1944-1953
Monster Computers vs. Engineering Computing. The early Computer Culture in the US, 1944-1953. The Boeing Analog Computer 1950 (Source: Henry Paynter: Palimpsest on the Electronic Art, Boston 1955, p. 44) Lecture Summer Meeting ICOHTEC, St. Etienne, 17 July 2018 Working Paper on the History of Computing No. 2/2018 Richard Vahrenkamp Logistik Consulting Berlin Email: [email protected] Web: www.vahrenkamp.org Status: 28 September 2020 1 Content 1 Introduction .................................................................................................................... 2 2 Digital and Analog Computers ........................................................................................ 4 3 The Digital Computer as an Invention of Mathematians.................................................. 8 4 Digital Computer with Drum Memory .............................................................................12 5 Analog Computing in the Aircraft Cluster .......................................................................12 6 The Digital Computer as Technology Push ....................................................................17 7 The Lack of Digital Computers at Los Alamos ...............................................................19 8 Conclusion ....................................................................................................................20 Abstract The paper explains the leading role of mathematicians in developing the high speed digital computer at the East Coast. The digital computer as cutting -

Oral History Collection, 1969-1973, 1977
Computer Oral History Collection, 1969-1973, 1977 Interviewee: Russell Kirsch Interviewer: Richard R. Mertz Attendee: Robert Elbourn Date: October 8, 1970 MERTZ: The following is an interview conducted on the eighth of October 1970 by Dr. Richard Mertz at the National Bureau of Standards with Mr. Russell Kirsch, one of the engineers involved in the design and development of the SEAC computer. Would you like to describe your early background and training and what led you into the field of computers? KIRSCH: Yes. My own interest in computers, as I was just telling you, has evolved fairly widely over the whole spectrum of computer activities ranging from actual soldering of computer hardware to abstract studies of theoretical capabilities of abstract computers. And, as I understand from the preliminary discussion that we've had, you would prefer me to concentrate on the early history, especially that part which is connected with the development of, early developments in computer hardware. Presumably early developments here at the Bureau of Standards that I was most intimately connected with. My own connections with the computer activities started in 1950 when Peter Elias at Harvard gave a seminar on computers, and I was a graduate student there at the time. This was a seminar in which each of the students reported on some activity in the computer field, and of course the computer field was barely in existence at the time. For essentially no particular reason I happened to agree to report on the, what was, I believe, at that time called the NBS Interim Computer which some people up at Harvard believed there was under construction at the Bureau of Standards at the time. -
Digital Computing in 1951 Or, “How I Spent My Summer Vacation”
Digital Computing in 1951 or, “How I Spent my Summer Vacation” Bob Braden USC/ISI 21 Sept 01 Braden 1 Why 1951? • Exactly 50 years (half century) ago (Century >> 1) • A watershed year in the history of digital computing – Externally-programmed machines ---> stored program machines – Electro-mechanical machines (counter wheels & relays) ---> vacuum tubes – One-of-a-kind machines ---> production machines 21 Sept 01 Braden 2 How was Computing Done in 1951? • Scientific & engineering computation used: – Books of tables – Mechanical desk calculators – Slide rules – Punched card equipment – Large-scale automatic calculators • Business computing used: – Mechanical desk calculators – Punched card equipment 21 Sept 01 Braden 3 Overview of Talk • Pre-1951 – Scientific computing with punched cards – Early automatic calculators • 1951: Automatic Calculators – Electronic punched card equipment –SSEC • 1951: Electronic Computers – State of the art in hardware & software –IBM 701 • Wrapup -- later developments 21 Sept 01 Braden 4 Scientific Computing with Punched Cards • Scientific and engineering computation made extensive use of punched card equipment in 1930s, 1940s, and 1950s. • Nurtured by IBM center at Columbia University • Here “programming” => plugging wires into interchangable plugboards • Sort of “logical Lego” -- rather a fun puzzle. • Some complex problems used 20 different plugboards. • Sometimes needed to know details of machine logic & timing. and operator instructions. 21 Sept 01 Braden 5 Example: Large plugboard... Example of upper limit of plugboard complexity (Only top half is shown) Most lines represent 5 - 11 wires each; ~ 260 wires total 21 Sept 01 Braden 6 Timing of plugboard hubs Typical plugboard timing chart... 21 Sept 01 Braden 7 Operator Instructions: sample •“Integration of the Differential Equation d2P/dr2 = P* F(r) Using the Type 601 Multiplying Punch”, P. -

Reconsidering the Stored-Program Concept
Reconsidering the Stored-Program Concept Thomas Haigh University of Wisconsin–Milwaukee Mark Priestley Crispin Rope The first in a three-part series appearing in IEEE Annals, this article gives a historical explanation of the endemic confusion surrounding the stored-program concept. After a detailed investigation of the history of this idea, the authors propose three more precisely defined alternatives to capture specific aspects of the new approach to computing introduced in 1945 by John von Neumann and his collaborators. It is a truth universally agreed that implemen- concept.” Historians almost invariably point tation of the “stored program concept” in the to a single document as the first publication late 1940s was the most important dividing to describe the concept and as the direct line in computer history, separating modern source of inspiration for the architecture of computers from their less evolved predeces- subsequent computer projects. That docu- sors. Yet, as Doron Swade recently noted, we ment is the “First Draft of a Report on the do not really agree on why this should be the EDVAC” (hereafter simply the First Draft), cir- case. For years he “assumed that the signifi- culated under the name of John von Neu- cance of the stored program must be self- mann in 1945.2 Although the true balance of evident” and attributed his own confusion to credit for the ideas contained in this docu- “a deficiency of understanding” or to “some ment has been widely and heatedly debated, lack” in his computer science education, its central importance to the development until finally he “became bold and began modern computing has not.3 asking” among computer historians and pio- We look at initial conceptions of the neers what it actually was. -

4. System Design of the SEAC and DYSEAC
4. System Design of the SEAC and DYSEAC A. L. Leiner, W. A. Notz, J. L. Smith, and A. Weinberger 1. INTRODUCTION In the course of developing comprehensive system plans for the SEAC and DYSEAC, certain stand- ard methods and procedures were evolved for producing a large-scale system design. 'Ihese standard procedures, including first the development of system specifications, then the development of func- tional plans, and finally the development of wiring plans, are described in this paper. Some of the problems encountered in formulating the specifications and system plans are also discussed [I] 1. 'he flow of development generally followed in creating such large-scale computers is charted in figure 4: 1. As indicated, two sets of factors (which can be considered as the initial boundary con- ditions of the system-design affect the choice of system features for a machine: first, the set of factors related to theintended use ofthe machine, and second, those related to the type of components or "building blockstt with which the machine is to be constructed. Because these two sets of factors are basically unrelated to each other, they often present contradictory require- ments. For example, a proposed machine feature may appear ideal when evaluated solely in terms of the intended use of the machine but may entail an unacceptable engineering risk when evaluated in terms of component reliability and cost. 'he necessity for effecting compromises and avoiding con- flicts of this kind between the rival claims of operational effectiveness and engineering reliabil- ity and economy strongly influenced the system designs of the SEAC and DYSEAC.