Undersea Warfare
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Radiant Heating with Infrared
W A T L O W RADIANT HEATING WITH INFRARED A TECHNICAL GUIDE TO UNDERSTANDING AND APPLYING INFRARED HEATERS Bleed Contents Topic Page The Advantages of Radiant Heat . 1 The Theory of Radiant Heat Transfer . 2 Problem Solving . 14 Controlling Radiant Heaters . 25 Tips On Oven Design . 29 Watlow RAYMAX® Heater Specifications . 34 The purpose of this technical guide is to assist customers in their oven design process, not to put Watlow in the position of designing (and guaranteeing) radiant ovens. The final responsibility for an oven design must remain with the equipment builder. This technical guide will provide you with an understanding of infrared radiant heating theory and application principles. It also contains examples and formulas used in determining specifications for a radiant heating application. To further understand electric heating principles, thermal system dynamics, infrared temperature sensing, temperature control and power control, the following information is also available from Watlow: • Watlow Product Catalog • Watlow Application Guide • Watlow Infrared Technical Guide to Understanding and Applying Infrared Temperature Sensors • Infrared Technical Letter #5-Emissivity Table • Radiant Technical Letter #11-Energy Uniformity of a Radiant Panel © Watlow Electric Manufacturing Company, 1997 The Advantages of Radiant Heat Electric radiant heat has many benefits over the alternative heating methods of conduction and convection: • Non-Contact Heating Radiant heaters have the ability to heat a product without physically contacting it. This can be advantageous when the product must be heated while in motion or when physical contact would contaminate or mar the product’s surface finish. • Fast Response Low thermal inertia of an infrared radiation heating system eliminates the need for long pre-heat cycles. -

Understanding Infrared Light
TEACHER/PARENT ACTIVITY MANUAL Joint Polar Satellite System Understanding Infrared Light This activity educates students about the electromagnetic spectrum, or different forms of light detected by Earth observing satellites. The Joint Polar Satellite System (JPSS), a collaborative effort between NOAA and NASA, detects various wavelengths of the electromagnetic spectrum including infrared light to measure the temperature of Earth’s surface, oceans, and atmosphere. The data from these measurements provide the nation with accurate weather forecasts, hurricane warnings, wildfire locations, and much more! Provided is a list of materials that can be purchased to complete several learning activities, including simulating infrared light by constructing homemade infrared goggles. Learning Objectives Next Generation Science Standards (Grades 5–8) Performance Disciplinary Description Expectation Core Ideas 4-PS4-1 PS4.A: • Waves, which are regular patterns of motion, can be made in water Waves and Their Wave Properties by disturbing the surface. When waves move across the surface of Applications in deep water, the water goes up and down in place; there is no net Technologies for motion in the direction of the wave except when the water meets a Information Transfer beach. (Note: This grade band endpoint was moved from K–2.) • Waves of the same type can differ in amplitude (height of the wave) and wavelength (spacing between wave peaks). 4-PS4-2 PS4.B: An object can be seen when light reflected from its surface enters the Waves and Their Electromagnetic eyes. Applications in Radiation Technologies for Information Transfer 4-PS3-2 PS3.B: Light also transfers energy from place to place. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Modeling Infrared and Combination Infrared-Microwave Heating of Foods in an Oven
MODELING INFRARED AND COMBINATION INFRARED-MICROWAVE HEATING OF FOODS IN AN OVEN A Dissertation Presented to the Faculty of the Graduate School of Cornell University in Partial Ful¯llment of the Requirements for the Degree of Doctor of Philosophy by Marialuci Frangipani Almeida January 2005 °c Marialuci Frangipani Almeida 2005 ALL RIGHTS RESERVED MODELING INFRARED AND COMBINATION INFRARED-MICROWAVE HEATING OF FOODS IN AN OVEN Marialuci Frangipani Almeida, Ph.D. Cornell University 2005 A quantitative, model-based understanding of heat exchange in infrared and com- bined infrared-microwave heating of food inside an oven is developed. The research is divided into three parts: measurement of optical properties, radiative heat transfer analysis and combined microwave-radiative heat transfer analysis. Optical proper- ties of reflectance, absorptance and transmittance in a potato tissue are measured as a function of wavelength, using a spectroradiometer. Penetration of energy is higher for halogen lamps that emit in the near- and mid-infrared range, compared to ceramic rods that emit mostly in the far infrared range. Reflectance in the near infrared range increases with moisture content of the food, thus decreasing the en- ergy coupled. Surface structure has signi¯cant influence on the optical properties. A 3-D radiative heat exchange model of an oven-food system is developed using a commercial ¯nite-element package. The air in the oven is assumed transparent to the radiation. Heat conduction is assumed in the entire oven (food and air) for the short duration. The wavelength dependence of emissivity (non-gray surface) is found to signi¯cantly a®ect the surface radiative flux and the use of a non-gray model is recommended for such materials, although simpli¯cation of the emissiv- ity variation is required to keep the computation time reasonable. -
Infrared Photography
- 1 -De Broux et al Scott T. De Broux Katherine Kay McCaul Sheri Shimamoto January 29, 2007 Infrared Photography Physical evidence documentation through forensic photography remains one the most important aspects of crime scene investigation. Subsequent analysis of photographs will often yield clues investigators can use to reconstruct the events of an incident, or may provide the proof necessary to gain a conviction at trial. Traditional photography records images in the visible light spectrum, and typically will record on film or in a digital file that which the human eye can see. Forensic photographers are often challenged with evidence where traditional photographic techniques are unsuccessful at documenting the evidence necessary to reconcile the facts of a particular case. For years forensic photographers have had a variety of specialized techniques available for documenting evidence under challenging situations. Infrared photography can be used in a variety of these situations to gain result that could not be obtained by photographing in the visible light spectrum. Infrared techniques can be applied in the field or in a laboratory environment. In some instances the only opportunity to document the evidence is in the field at the crime scene. Until recently the only available option to the forensic photographer involved infrared techniques that used conventional film sensitive to wave lengths of light in the infrared range of the electromagnetic spectrum. Complicated workflow often made this technique difficult and expensive to utilize, and lead to underutilization of the technique. Advances in technology have now made digital imaging options available to the forensic photographer for performing infrared photography in both a field or laboratory environment. -
A Carpet Cloak Device for Visible Light
A Carpet Cloak Device for Visible Light Majid Gharghi1a, Christopher Gladden1a, Thomas Zentgraf 2, Yongmin Liu1, Xiaobo Yin1, Jason Valentine3, Xiang Zhang 1,4,* 1NSF Nanoscale Science and Engineering Center (NSEC), University of California, Berkeley 3112 Etcheverry Hall, UC Berkeley, CA 94720, USA 2Department of Physics, University of Paderborn Warburger Str. 100, 33098 Paderborn, Germany 3Department of Mechanical Engineering, Vanderbilt University VU Station B 351592, Nashville, TN 37235, USA 4Materials Science Division, Lawrence Berkeley National Laboratory, 1 Cyclotron Road, Berkeley, CA 94720, USA a These authors contributed equally to this work. *To whom correspondence should be addressed. E-mail: [email protected] ABSTRACT: We report an invisibility carpet cloak device, which is capable of making an object undetectable by visible light. The cloak is designed using quasi conformal mapping and is fabricated in a silicon nitride waveguide on a specially developed nano-porous silicon oxide substrate with a very low refractive index. The spatial index variation is realized by etching holes of various sizes in the nitride layer at deep subwavelength scale creating a local effective medium index. The fabricated device demonstrates wideband invisibility throughout the visible spectrum with low loss. This silicon nitride on low index substrate can also be a general scheme for implementation of transformation optical devices at visible frequency. KEYWORDS: Optical metamaterials, invisibility cloak, optical transformation Invisibility cloaks, a family of optical illusion devices that route electromagnetic (EM) waves around an object so that the existence of the object does not perturb light propagation, are still in their infancy. Artificially engineered materials with specific EM properties, known as metamaterials [1,2], have been used to control the propagation of EM waves, and have recently 1 been applied to cloaking through transformation optics [3-8]. -

An Infrared Invisibility Cloak Composed of Glass ͒ Elena Semouchkina,1,2,A Douglas H
APPLIED PHYSICS LETTERS 96, 233503 ͑2010͒ An infrared invisibility cloak composed of glass ͒ Elena Semouchkina,1,2,a Douglas H. Werner,2,3 George B. Semouchkin,1,2 and Carlo Pantano2,4 1Department of Electrical and Computer Engineering, Michigan Technological University, Houghton, Michigan 49931, USA 2Materials Research Institute, The Pennsylvania State University, University Park, Pennsylvania 16802, USA 3Department of Electrical Engineering, The Pennsylvania State University, University Park, Pennsylvania 16802, USA 4Department of Materials Science and Engineering, The Pennsylvania State University, University Park, Pennsylvania 16802, USA ͑Received 12 November 2009; accepted 17 May 2010; published online 7 June 2010͒ We propose to implement a nonmetallic low-loss cloak for the infrared range from identical chalcogenide glass resonators. Based on transformation optics for cylindrical objects, our approach does not require metamaterial response to be homogeneous and accounts for the discrete nature of elementary responses governed by resonator shape, illumination angle, and inter-resonator coupling. Air fractions are employed to obtain the desired distribution of the cloak effective parameters. The effect of cloaking is verified by full-wave simulations of the true multiresonator structure. The feasibility of cloak fabrication is demonstrated by prototyping glass grating structures with the dimensions characteristic for the cloak resonators. © 2010 American Institute of Physics. ͓doi:10.1063/1.3447794͔ 1,2 Recent work on transformation optics has revealed a MICROWAVE STUDIO. The best results were obtained for cy- path toward creating an invisibility cloak from metamaterials lindrical resonators with diameters twice as large as their with a prescribed spatial dispersion of effective parameters, height, which supported magnetic moments along their axes in particular, with radial dispersion of the cloak effective at incidence angles ranging between 15° and 90°. -
Radio Waves: Microwaves: Infrared: Visible: Ultraviolet: X-Rays: Gamma
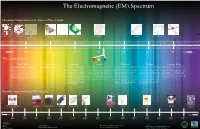
The Electromagnetic (EM) Spectrum Hawaiian Comparisons to the Sizes of Wavelengths: Aloha Tower Aloha Stadium Hale Kamehameha Point of a Needle Plant Cell Bacteria Protein Water Molecule Atom (Hawaiian House) Butterfly 3 -2 -5 -6 -8 -10 -12 Longer 10 10 10 10 10 10 10 Shorter Wavelength (Meters): Radio Waves: Microwaves: Infrared: Visible: Ultraviolet: X-Rays: Gamma Rays: Radio waves have the longest wavelength in the EM Since microwaves can penetrate haze, light Infrared light has a range of wavelengths Visible light waves are the only waves in spec- Ultraviolet light is invisible to the human As the wavelengths of the spectrum de- Gamma rays have the smallest wavelength, spectrum. As implied, radio waves bring music to ra- rain, snow, clouds and smoke, these waves like visible light. “Near infrared” light is trum that humans can see. These waves are eyes, but some insects, like bumblebees, have crease, the energy increases, such as how but have the most energy out of all of the other dios, but they also provide signals to cell phones, tele- are ideal for viewing the Earth from space. closest in wavelength to visible light and seen in a range of colors with red having the proven to be able to see ultraviolet light. The x-rays tend to act more like a particle than waves in the spectrum. These waves are gener- visions, etc. Radio waves are received at an estimate The wavelength of micro waves in a mi- “far infrared” is closer to the microwave re- longest wavelength and violet (purple) having ultraviolet part of the spectrum is divided into a wave. -

Ink Differentiation with Infrared Techniques
J Forensic Sci, Oct. 1973, Vol. 18, No. 4 R. Chowdhry, ~ M.Sc., S. K. Gupta, 2 M.Sc., and H. L. Bami, 3 Ph.D., F.R.I.C. Ink Differentiation with Infrared Techniques There are often questioned document problems in which alterations, additions, and obliterations have been made by visually similar inks. Such cases of forgery have been found in checks, passports, birth certificates, receipts, currency notes, lottery tickets, account books, etc. In the examination of such documents, an expert is often not inter- ested in the complete composition of the inks involved, but is basically concerned with discriminating between these inks which are visually similar but chemically different in composition. He is thus interested in comparative study of the properties of various inks at large. A chemical analyst provided with a bottle of ink can determine the complete composition of an ink by several physico-chemical methods, but examination of ink on paper presents a much more complex and difficult problem [1,2]. For instance, about ninety-eight percent of the ink evaporates on writing and the residue is an extremely small quantity covering a very large surface. Ink writings, therefore, are either tested on paper or physically removed by special techniques [1,3]. This approach, apart from other basic handicaps, results in physical damage to the document in varying degrees depending upon the method used. Removal of ink from the document by solvents or physical punching of paper, followed by chromatography, electrophoresis, spectrophotometry, etc. are some of the other recent techniques which may give some specific information about composition and comparative identification [1-5]. -

Using Color Infrared (CIR) Imagery
Using Color Infrared (CIR) Imagery A Guide for Understanding, Interpreting and Benefiting from CIR Imagery Prepared for the North Carolina Geographic Information Coordinating Council by the Statewide Mapping Advisory Committee, Working Group for Orthophotography Planning July 2011 1 Executive summary A color infrared (CIR) image is a false color photograph (digital or film) that shows the reflected electromagnetic waves from an object accordingly: Near Infrared (NIR), which is invisible to the human eye, as red Green light as blue Red light as green Although CIR photography can be used to photograph an object from any vantage point, this issue paper will focus on its use in aerial imagery. The usefulness of this photographic technology in aerial imagery is based on the science that most objects exhibit a neglible NIR reflectance, but actively growing plants exhibit a high NIR reflectance (~6x stronger than a plant’s reflectance of visible green light) and stressed plants (either from disease or drought) exhibit a reduction in their NIR reflectance. Consequently, actively growing vegetation shows up prominently on an aerial image as bright red, stressed vegetation shows up as a darker red, and a non-vegetated area shows up as a color dependent on its material composition. In addition, there are subtle NIR reflectance differences between vegetation types (conifers vs. broadleaf trees and between species) that can aid in plant identification. Although CIR photography was originally developed for the U.S. military in WWII to detect enemy -

Its Secrets Revealed Light Concepts
ITS SECRETS REVEALED LIGHT CONCEPTS Most light is invisible to our eyes Light is a streaming “code” that tells about the chemical composition of its source Light from a glowing object can reveal its temperature Find out how information about distant objects comes to us in the form of light. Explore these concepts further using the recommended resources mentioned in this reading s e l e c t i o n . Developed with the generous support of The Charles Hayden Foundation LIGHT: ITS SECRETS REVEALED Most light is invisible to our eyes Visible or Invisible, It’s All Light When you look at a star, your eyes are capturing light that traveled all the way from the star to your eye. Astronomers learn about stars, nebulae, galaxies, and other faraway phenomena by collecting light from them with specialized instruments. But they do not collect just the kind of light your eyes can see. They also observe other kinds of light that eyes cannot see. This invisible light includes radio waves, microwaves, infrared light, ultraviolet light, X rays, and gamma rays. All light, whether visible or invisible, is a kind of wave. These waves are like the ripples that move along the surface of a lake after a pebble is dropped. Light waves, however, are ripples in electric and magnetic fields—which is why they are also called electromagnetic waves. There is no fundamental difference between visible light and invisible light such as radio waves and X rays. They are all electromagnetic waves that differ in only one way: their wavelength. -
Understanding Color-Infrared Photographs
Understanding Color-Infrared Photographs Images obtained by satellites and high- apart and are analogous to light wave- altitude aircraft give engineers and scien- lenths and how closely they are spaced. tists a tool to study landforms, vegetation health patterns, environmental pollution, Other parts of the spectrumCsuch as the and other effects of human activities on invisible near-infrared wavelengthsCcan the planet’s surface. be recorded by either electronic sensors or special photographic films sensitive to Satellites and high-altitude aircraft these wavelengths. These sensors and equipped to record scenes of the Earth use films record the energy reflected by the both visible and invisible parts of the ground and the Sun’s spectral energy. The electromagnetic spectrum. Near-infrared color-infrared film images referred to in light is invisible to the human eye, but this fact sheet should not be confused adding it to these images allows scientists with electronic thermography (thermal to “see” the surface of the Earth in other recordings), a process in which long-wave than natural colors. The result is “color- or “far-infrared” radiation is electronically infrared” photography. detected and subsequently displayed at visible wavelengths. Near-infrared and The electromagnetic spectrum is the sci- visible wavelengths that are simultaneous- entific term for the collective types of ly recorded combine to provide a unique light and energy emitted from the Sun. view of the Earth’s vegetation and other NASA color-infrared photograph--New Orleans, La The part of the spectrum visible to the features of the planet’s surface. human eye is the normal rainbow of col- infrared film.